 2018-01-21
2018-01-21 1017
1017Для ротора, зображеного на Рис.4.1, умови динамічної урівноваженості можна записати у вигляді векторних рівнянь

| (4.5) (4.6) |
де DIк і DIIк - вектори дисбалансів DIк і DIIк мас, що коректують mIк і mIIк розташованих в площинах І і П;
МDIIк =mIIк rIIкℓ вектор моменту дисбалансу DIIк маси mIIк, що коректує, розташованої в площині П.
Цю задачу розв'яжемо графічно в такій послідовності.
1.Визначаємо моменти дисбалансів неврівноважених мас:

|
2. Будуємо векторний багатокутник моментів (Рис.4.2) дисбалансів по рівнянню (4.6). При цьому вектори моментів МDi дисбалансів повертаємо на 90°| до збігу їх з напрямами векторів відповідних дисбалансів Di. Багатокутник будуємо в масштабі μМD, гмм2/мм; замикаючий вектор МDIIк багатокутника визначить добуток дисбалансу DIIк =mIIкrIIк на відстань L між площиною I і П. Виміряємо по кресленню довжину вектора МDIIк, мм.
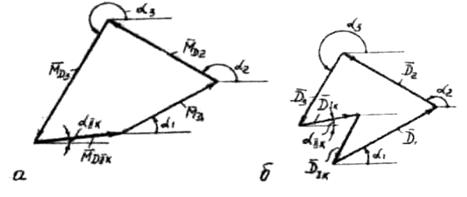 Рис.4.2
Рис.4.2
3.Визначаємо величину дисбалансу маси, що коректує, і знімає моментну неврівноваженість.

|
4. Задавшись масою противаги mIIк, що коректує, з числа наявних в наборі тягарців, знаходимо радіус його установки rIiк.
5. Визначаємо напрям радіусу rIIк безпосередньо вимірюванням кута між прийнятим позитивним напрямом горизонталі й замикаючого вектора моменту дисбалансу маси противаги αIIк, що коректує, град. Установкою в площині П маси противаги, що коректує, досягаємо моментної врівноваженості ротора.
6. По рівнянню (4.5) будуємо векторний багатокутник дисбалансів (рис.4.2,б) в масштабі μD. Замикаючий вектор D1к багатокутника визначає добуток маси противаги mIк, що коректує, на радіус його розташування rIк в площині корекції I.
7. Вектор D1к в масштабі μD зображає величину дисбалансу DIк =mIкrIк маси що коректує mIк, яка знімає статичну неврівноваженість ротора.
8. Задавшись величиною маси mIк противаги, що коректує, з числа наявних в наборі тягарців, визначаємо радіус його установки rIк, а його напрям - безпосереднім вимірюванням кута αIк, град. Таким чином, установкою мас mIк і mIIк що коректують, в площині корекції I і П з відповідними ексцентриситетами rIк rIIк і кутами їх розташування αIк αIIк, досягаємо динамічної врівноваженості ротора.
При аналітичному методі визначення дисбалансів розташування мас, що коректують, і рівняння (4.5) і (4.6) перетворяться в чотири рівняння проекцій на осі координат:
| (4.7) | |
| (4.8) |
Розв'язання рівнянь (4.7) дозволяє визначити величину і положення дисбалансу, що коректує, в площині П, що знімає моментну неврівноваженість ротора. З першого рівняння системи (4.7) знаходимо

|
У лабораторній установці ТМЦ-36 (Рис.4.3) площини I, 2, 3 і П встановлено на однаковій відстані, що дорівнює  ; отже
; отже 
 Рис 4.3
Рис 4.3
Після нескладних перетворень, прийнявши а=1; в =2; с=3.і d=4 ця рівність прийме вигляд
| (4.9) |
Аналогічно знаходимо

| (4.10) |
Величина дисбалансу, що коректує, через його проекції

| (4.11) |
Положення| дисбалансу в площині П визначається кутом αIIк;

| (4.12) |
З рівнянь (5.8) знаходимо величину і положення дисбалансу, що коректує, в площині корекції I, що знімає статичну неврівноваженість ротора:

| (4.13) |
Величина дисбалансу, що коректує, в площині I
| (4.14) |
Положення дисбалансу визначається кутом αIк;

| (4.15) |
Величинами мас mIк і mIIк задаємося з числа наявних в наборі тягарців і визначаємо по формулах (4.10) і (4.12) величини ексцентриситетів цих мас rIк rIiк.








