 2018-01-21
2018-01-21 455
455Системи автоматичного керування, які містять тільки функціонально необхідні елементи, як правило не повною мірою задовольняють вимоги, що висуваються до показників якості процесу керування. Для досягнення бажаної якості процесу керування або регулювання є два способи:
• зміна параметрів системи (постійних часу, коефіцієнтів підсилення);
• зміна структури системи шляхом введення додаткової ланки корегувального пристрою.
Останній спосіб використовують при неможливості досягнути успіху використовуючи перший метод.
Корекцією називається зміна динамічних характеристик САК шляхом введення додаткових пристроїв для забезпечення заданих показників якості й стійкості.
Корегуючі пристрої (КП) бувають:
• 1) Послідовні КП;
• 2) Паралельні КП;
3) КП за зовнішніми впливами
• Послідовні КП вводяться послідовно основним елементам САК в прямий ланцюг за такими схемами:

|  – передатні функції незмінної частини системи, – передатні функції незмінної частини системи,
 - передатна функція КП - передатна функція КП
|

| 


|
• На практиці використовуються такі види послідовних КП:
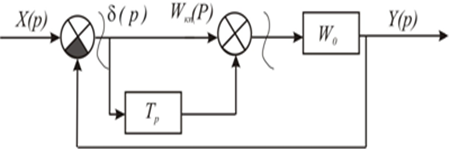
1) Введення похідної від помилки.
• 
• 
• Введення такої ланки (форсуючої) дозволяє внести позитивний нахил ЛЧХ і позитивну фазу в тому частотному діапазоні, де це необхідно для забезпечення стійкості і якості перехідного процесу.
• Такі КП називаються диференційними ланцюгами з фазовим випередженням, вони використовуються для підвищення запасів стійкості й поліпшення перехідного процесу.
2) Введення інтеграла від помилки.
• Використовується для додання астатизму або підвищення порядку астатизму в системі, що спрямовано на підвищення точності в усталених режимах.

• 








