 2018-01-21
2018-01-21 1626
16261.1. Кинематические схемы с электродвигателем непрерывного действия и передачами типа: рейка-шестерня, винт-гайка, тросовая передача
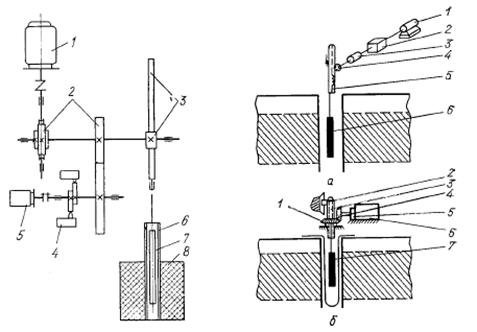
Рис. 5.3. Кинематическая схема исполнительного механизма АР с электродвигателем:
1 — электродвигатель; 2 — редуктор; 3 — пара рейка-шестерня; 4 — концевые выключатели;
5— датчик положения; 6 — канал стержня регулирования; 7 — стержень регулирования;
8 — активная зона
Рис. 5.4. Иллюстрация конструкции ИМ: типа рейка-шестерня (а) и типа гайка — винт (б):
Схема а: 1 — электродвигатель; 2 — редуктор; 3 — электромагнитная муфта; 4 — ведущая шестерня; 5 — зубчатая рейка; 6 — стержень регулирования;
Схема б: 1 — коническая гайка — шестерня; 2 —шпонка; 3 — винт; 4 — ведущая коническая шестерня; 5 — редуктор; 6 — электродвигатель; 7 — стержень регулирования.

Рис. 5.5. Кинематическая схема электромеханического устройства A3:
1 — электродвигатель; 2 — удерживающее устройство (электромагнитная муфта); 3 — автономный источник энергии (пружина); 4 — преобразователь вращательного движения в поступательное; 5 — редуктор; 6 — концевой выключатель; 7—тормоз; 8 — канал; 9 — стержень A3; 10 — активная зона
Рис. 5.6. Кинематическая схема исполнительного механизма, совмещающего функции АР, A3, КС — РР:
1—концевой выключатель; 2 — датчик положения стержня; 3 — редуктор; 4 — электродвигатель; 5 — электромагнитная муфта; 6 — автономный источник энергии (пружина); 7 — преобразователь вращательного движения в поступательное; 8 — тормоз; 9 — канал для стержня регулирования; 10 — стержень регулирования; 11 — активная зона








