 2018-01-21
2018-01-21 829
8291.2. Приводы с двигателем импульсного действия
Шаговые электродвигатели. В некоторых исполнительных механизмах СУЗ применяются нестандартные электрические двигатели, например, шаговые двигатели (ШД). ШД называют конструкцию, состоящую из нескольких электромагнитов перемещающих подвижный элемент – рейку с магнитными вставками или ротор.
Линейный шаговый двигатель
Примером комбинированного ИМ, в котором несколько структурных элементов объединены в один узел, является исполнительный механизм с линейным шаговым электродвигателем (ЛШД) (рис. 5.7). ЛШД в данном случае совмещает функции собственно двигателя, удерживающего устройства (удержание якоря осуществляется силами электромагнитного поля), редуктора и датчика положения. В качестве автономного источника энергии используется масса регулирующего органа.
Из этого примера видно, насколько может быть упрощена кинематика привода за счет совмещения функциональных элементов привода в одной конструкционной сборке.
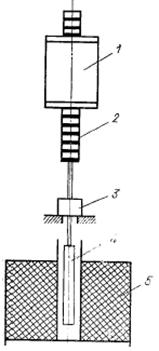
Рис. 5.7. Схема исполнительного механизма с линейным шаговым двигателем (ЛШД).
1 — статор ЛШД; 2 — якорь ЛШД; 3 — тормоз; 4 — стержень регулирования; 5 — активная зона
При поступательном движении регулирующего органа (стержень регулирования) целесообразно применение ЛШД. В этом случае, как уже отмечалось, нет необходимости в преобразовании вращательного движения в поступательное. Намагничивающие обмотки, включающие в себя удерживающие и захватывающие катушки, уложены в кольцевые пазы вдоль трубы, изготовленной из мягкого магнитного материала. Наружный корпус двигателя служит одновременно стенкой внешней камеры, воспринимающей рабочее давление. Движущее магнитное поле в обмотках статора создается не в радиальном, а в аксиальном направлении, и якорь получает не вращательное, а поступательное движение. При этом якорь двигателя перемещается шагами. Перемещение якоря в том или ином направлении обеспечивается захватывающими катушками, а фиксация в определенном положении - удерживающими.
Поворотные шаговые электродвигатели. В некоторых исполнительных механизмах СУЗ применяются нестандартные электрические двигатели, например, шаговые поворотные двигатели (ШД). ШД называют конструкцию, состоящую из нескольких электромагнитов поворотного типа, осуществляющую поворот вала на любой заданный угол α посредством многократного поворота его на фиксированный угол  , называемый шагом двигателя. Одна из возможных схем шагового двигателя изображена на рис. 5.10.
, называемый шагом двигателя. Одна из возможных схем шагового двигателя изображена на рис. 5.10.

Рис. 5.10. Схема шагового двигателя с пассивным ротором
Рис. 5.11. Диаграмма коммутации обмоток управления шагового двигателя (заштрихованы включенные обмотки)
Якорь двигателя изготовлен из предварительно намагниченного материала. При включенной обмотке статора 1 якорь двигателя расположится по оси этой обмотки. Примем это положение якоря за начало отсчета угла поворота вала. Если при включенной обмотке / включать также обмотку //, то якорь займет промежуточное положение между осями обмоток / и //, т.е. повернется на 30°. Если далее отключить обмотку /, то якорь расположится по оси обмотки //, повернувшись еще на 30°. Комбинируя далее подобным образом включение соседних обмоток возбуждения, можно заставить якорь повернуться на любой угол, кратный =30°.
Временная диаграмма коммутации обмоток за один оборот двигателя при вращении его по часовой стрелке приведена на рис. 5.11. Нетрудно представить себе, что возможно создание аналогичной конструкции, состоящей из любого числа обмоток возбуждения и полюсов якоря, при которых будет получено необходимое значение .








