 2018-01-21
2018-01-21 1044
1044
В течение всей работы технологического комплекса ПЛК выполняет одну и ту же программу. Время выполнения программы – доли секунды и доли секунды. За это время ПЛК успевает опросить все датчики, преобразовать с помощью АЦП и ДЦП сигналы с датчиков в цифровой код и записать их в ОЗУ. Затем ПЛК выполняет вычисления и определяет значения сигналов, которые нужно выдать на исполнительные устройства. Если это устройство логикокомандного типа, то вычисляется логическая функция, если устройство аналогового типа, то решается дифференциальное уравнение в форме передаточной функции W(p) (те, которые вы изучали в курсе ТАУ).
После этого ПЛК через ЦАП и ЦДП выдает управляющие сигналы на свои выходы. Т.е. за время работы технологического комплекса одна и та же программа исполняется сотни тыс. раз. Как только цикл программы заканчивается, она сразу же начинает исполняться снова. В результате ПЛК постоянно обновляет данные о состоянии технологического комплекса (по датчикам) и обновляет сигналы, выдаваемые на исполнительные устройства.
Программирование ПЛК
ПЛК, как и всякое вычислительное устройство, выполняет программу.
Существует 2 варианта разработки этой программы:
1. С помощью специализированного языка
Существует несколько систем программирования, ориентированных на решение задач ПЛК, это язык релейно-контактных схем, step. Такие системы разрабатываются фирмами производителями ПЛК.
2. С помощью алгоблоков
Алгоблок – это не какое-то устройство, а небольшая программа, выполняющая какую-то функцию по управлению тех. процессом.
Функций – множество. С помощью одних осуществляется опрос датчиков, с помощью других – формирование управляющих сигналов и выдача их на исполнительные устройства, с помощью 3-х – выполнение разнообразных вычислений.
Соединяя алгоблоки между собой, вы формируете программу управления тех. системой.
Такими алгоблоками являются тэги в системе Genie. Такие программы нуждаются лишь в уточнении. Например, если программа опрашивает вход, на который приходит сигнал аналогового датчика, то необходимо установить номер этого входа. Если выполняется вычислительная обработка, то необходимо задать численность значения коэффициентов, постоянных времени. Алгоблоки могут выводиться на экран, в этом случае вы просто соединяете их стрелками. Возможно программирование и без экрана. В этом случае их конфигурирование между собой выполняется путем поочередного соединения входов одного алгоблока с выходами другого.
Рассмотрим процесс программирования ПЛК с помощью алгоблоков на примере контроллера Ремиконт Р-130 (рис.12).
Процедура программирования выполняется за 4 стадии:
1. Выбор нужных стандартных алгоритмов и занесение их в алгоблоки.
У Р-130 всего 99 алгоблоков и несколько десятков стандартных алгоритмов. Здесь алгоблок является как бы контейнером, в который загружается нужный алгоритм.
2. Установление взаимосвязи между входами и выходами алгоблоков.
Для этого понадобится 4 цифровых индикатора.
3. Определение значений коэффициентов и постоянных времени.
Ввод коэффициентов осуществляется поочередно в заданном порядке.
4. Установление начальных значений.
В момент первого включения контроллера он еще не успел обработать все сигналы с датчиков. Тем не менее, на выходах контроллера есть какие-то сигналы.
Поскольку информация о технологическом процессе еще не обработана, они могут оказаться ложными. Может возникнуть ситуация когда в первый момент исполнительные устройства включаются, а затем резко отключаются. Чтобы это не происходило, исходя из логики работы технологической системы устанавливают в каком состоянии должны находится исполнительные устройства в первый момент. Эти значения определяются на четвертой стадии программирования.
Виды алгоритмов
В Р-130 все алгоритмы разбиты на следующие группы:
1. Алгоритмы ввода – аналоговый ввод, дискретный, интерфейсный.
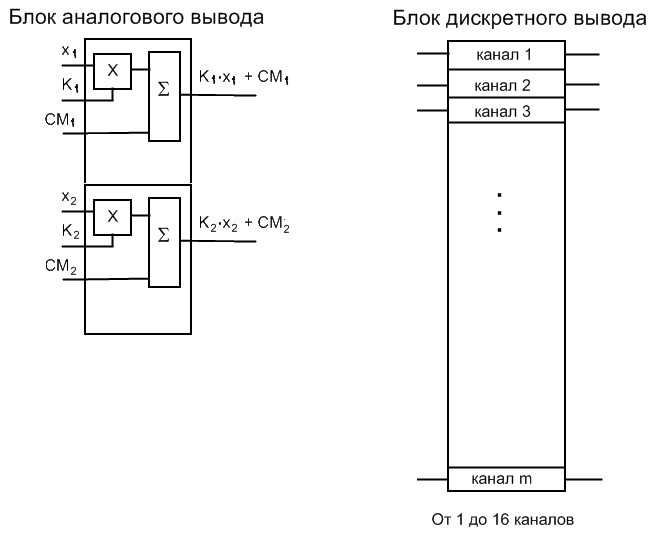
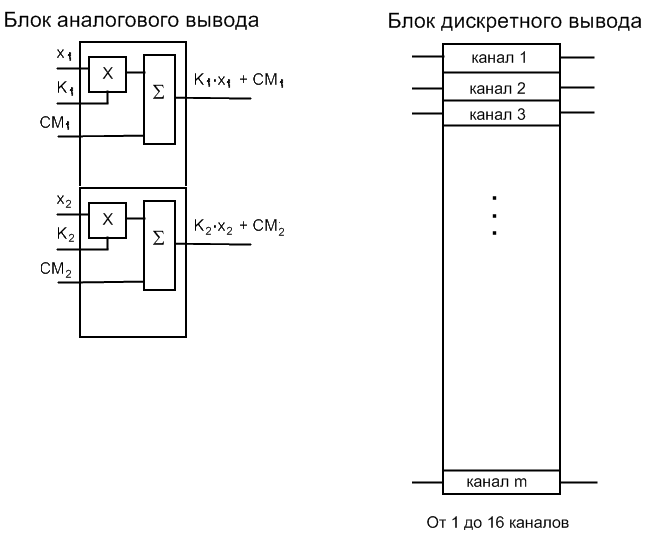
Алгоритм аналогового ввода опрашивает аналоговые датчики, подключенные к входам контроллера и вводит сигналы в цифровом виде в контроллер. Алгоритм дискретного ввода вводит сигналы с датчиков дискретного типа. Интерфейсный ввод позволяет контроллеру принять сигнал с датчика, подключенного к другому контроллеру. Блок-схемы алгоритмов показаны на рисунке 17.
а) б)
Рисунок 17 – Блок-схемы алгоритмов аналогового (а) и дискретного (б) ввода
Один блок аналогового ввода может ввести два аналоговых сигнала. При этом возможно умножение сигнала на коэффициент (K) – т.е. его усиление – и сложение с некоторым смещением (СМ). Именно так производится обработка сигналов с аналоговых датчиков обычными (нецифровыми) регуляторами.
Один блок дискретного ввода может ввести до 16 сигналов с датчиков дискретного типа.
2. Алгоритмы вывода
Также имеются алгоритмы аналогового, дискретного и интерфейсного вывода (рис.18).
а) б)
Рисунок 18 – Блок-схемы алгоритмов аналогового (а) и дискретного (б) вывода
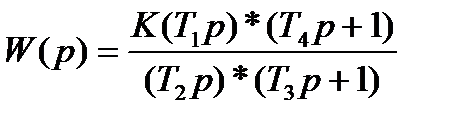
3. Алгоритмы регулирования
Имеется несколько видов регулирования, основным из которых является ПИД-регулирование (пропорционально-интегрально-дифференциальное). Этот вид регулирования основан на решении дифференциального уравнения в операторной форме (напомним, что передаточная функция в теории автоматического управления есть не что иное, как запись дифференциального уравнения в операторной форме Лапласа). Оператор Лапласа p означает дифференцирование по времени с коэффициентом T 1 (его называют постоянной времени), если на него производится умножение и он стоит в числителе передаточной функции – T 1 p. Если p стоит в знаменателе – T 2 p, то это соответствует интегрированию по времени. Наконец, просто умножение на коэффициент K соответствует пропорциональному изменению входного сигнала рассогласования. Отсюда и название – пропорционально- интегрально-дифференциальное регулирование:
 .
.
4. Алгоритмы статической математической обработки – арифметические действия, например, вычисление среднего, выделение максимальных и минимальных значений из нескольких, выделение корня и т.д.
5. Алгоритмы динамической математической обработки – дифференцирование по времени, интегрирование, фильтрация, вычисление среднего по времени значения сигнала.
6. Алгоритмы логической обработки – вычисление стандартных логических функций (рис.19).
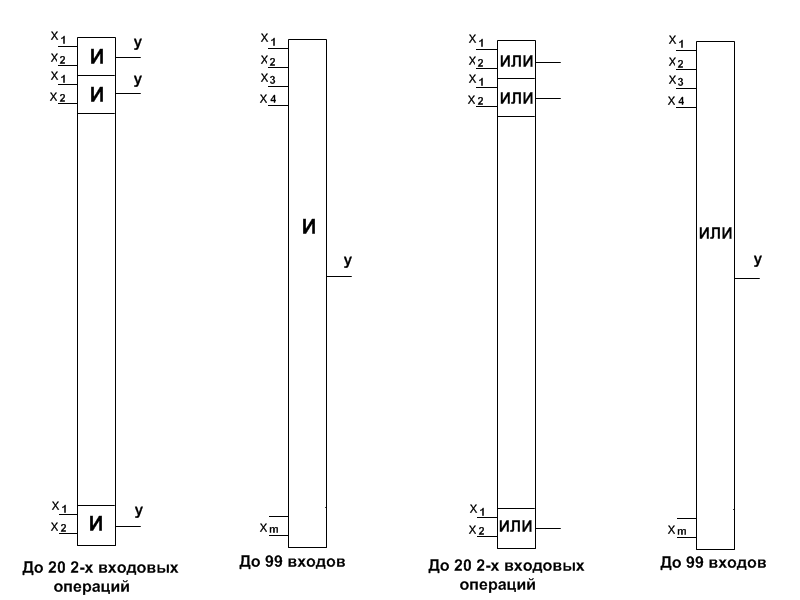
Рисунок 19 – Алгоритмы вычисления логических функций
7. Алгоритмы реализации стандартных цифровых устройств – триггеров, счетчиков, дешифраторов, мультиплексоров, одновибраторов.
Рассмотрим, как из алгоблоков создать схему управления токарным станком-автоматом.
Пусть нам нужно реализовать логическую функцию сигнала включения перемещения автооператора (вынос заготовки на линию центров). Будем для простоты считать, что сигнал должен выдаваться, когда все механизмы находятся в исходном состоянии – задняя бабка, суппорт, резцедержатель. Исходные состояния этих механизмов фиксируют датчики b 1, s 1, r 1.
Выдачу сигнала нужно прекратить, когда автооператор вынесет заготовку на линию центров, т.е. когда сработает датчик a 2. Т.е. логическая функция для сигнала выноса заготовки автооператором на линию центров имеет вид  .
.
Для ввода сигналов с датчиков необходим блок ввода дискретных сигналов. Для получения логического «НЕ» нужен соответствующий блок.
Для объединения четырех сигналов через логическое «И» нужен блок «И». Наконец, нужен блок для вывода дискретных сигналов. На рисунке 20 показана схема соединения алгоблоков для выдачи сигнала A1.
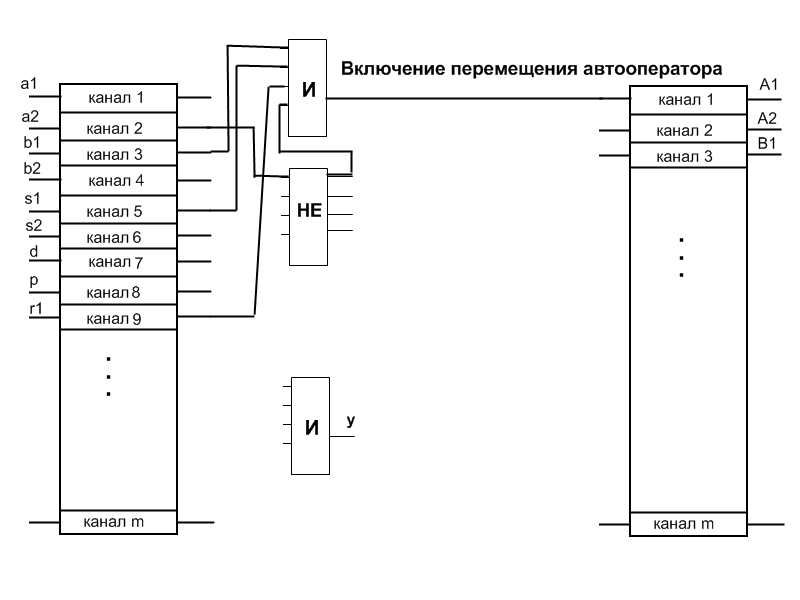
Рисунок 20 – Схема соединения алгоблоков для сигнала выноса детали на линию центров автооператором

