 2018-01-21
2018-01-21 802
802Схема одного из вариантов механизма смены инструмента представлена на рисунке:
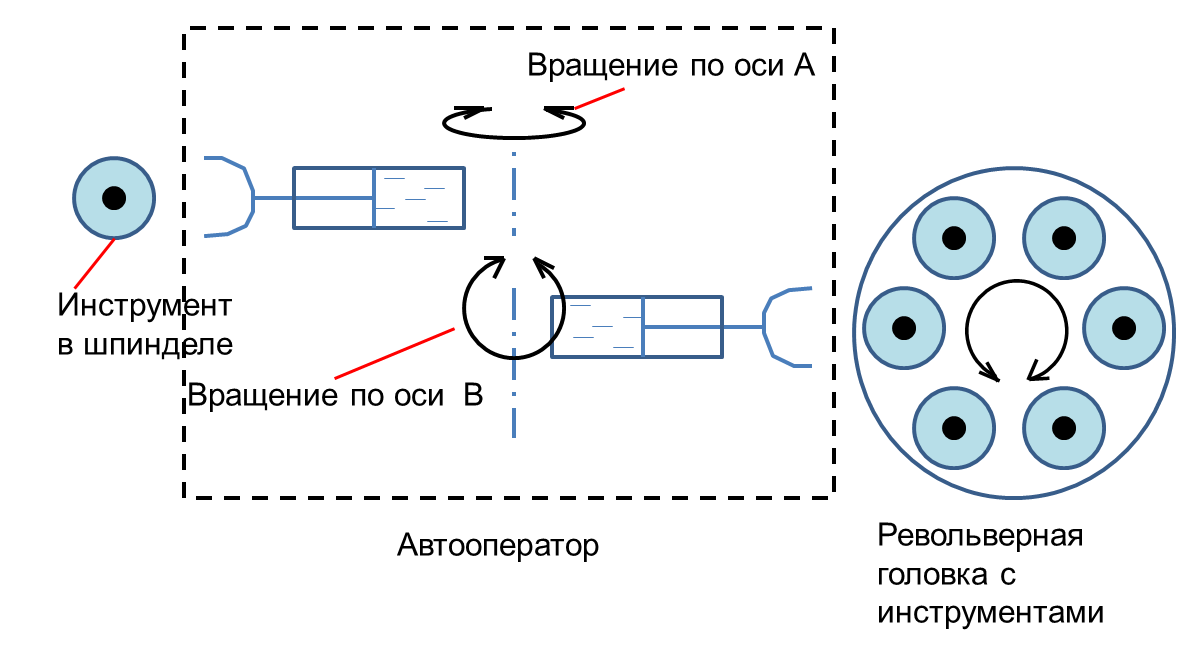
Рисунок 48 – Схема одного из вариантов реализации механизма смены инструмента
Оправки с инструментами располагаются в гнездах револьверной головки магазина инструментов. Изъятие инструмента из магазина и установку его в шпинделе станка выполняет автооператор, он имеет 2 захвата, которые могут выдвигаться с помощью гидроцилиндров. Изъятие и установку инструмента можно выполнить путем вращения автооператора по оси А на 900. С помощью вращения по оси В на 1800 захваты меняются местами. При получении команды на смену инструмента сначала происходит отработка команды Т. При этом необходимо развернуть револьверную головку таким образом, чтобы указанный в кадре инструмент оказался в позиции захвата. Эта команда распадается на целый ряд элементарных действий:
1. Разжим фиксатора магазина
2. Поворот револьверной головки на одну позицию по-, или против часовой стрелки. Управление поворотом осуществляется УЧПУ (куда ближе)
3. Проверка соответствия номера инструмента в позиции захвата. Если № инструмента в позиции захвата совпадает с указанным в кадре, происходит зажим фиксатора. Если нет, то повторяются действия 2 и 3 столько раз, сколько необходимо.
4. Параллельно поворотом револьверной головки происходит поворот шпинделя в угловую позицию, из которой возможно изъятие инструмента. (Инструмент из шпинделя может быть извлечен, только если его установить в определенное угловое положение.)
Следующим этапом становится работа автооператора
1) Выдвижение захватов
2) Захват инструментов в магазине и шпинделе
3) Разворот автооператора по оси А на 900.
Теперь происходит передача управления магазину: револьверная головка должна повернуться таким образом, чтобы инструмент, который был изъят из шпинделя, был помещен в свое старое место в револьверной головке (в некоторых системах это делать не нужно, т.к. система будет запоминать каждый раз место в револьверной головке, куда был помещен отработавший свое инструмент). Далее опять происходит передача управления автооператору:
1) Разворот автооператора по оси В на 1800
2) Обратный разворот автооператора по оси А на -900.
3) Разжим захватов
4) Втягивание гидроцилиндров и захватов в исходные позиции.
Как видим, работа механизма делится на несколько стадий, при этом каждая стадия распадается на целый набор элементарных действий. В нашем примере общее количество элементарных действий может составлять несколько десятков.
Описание работы вспомогательных механизмов
с помощью графов
Описание работы механизмов выполняют с помощью аппарата математической логики, различных алгоритмов. Одним из эффективных средств описания являются сети Петри (Карл Петри, 1927-2010) для описания работы динамических систем. Сеть Петри является разновидностью графа. Рассмотрим принцип описания работы вспомогательных механизмов на примере части механизма смены инструмента – револьверной головки.
Основными элементами графа являются вершины и дуги (рис.49). Вершина соответствует состоянию механизма.
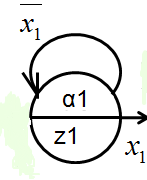
 - состояние механизма. В этом состоянии запускается процедура z1. В результате выполнения этой процедуры должен сработать некоторый датчик. Если датчик сработал (х1), происходит переход к следующему состоянию механизма. Если датчик не сработал, происходит ожидание, то есть возврат к процедуре z1 и ее повторное выполнение.
- состояние механизма. В этом состоянии запускается процедура z1. В результате выполнения этой процедуры должен сработать некоторый датчик. Если датчик сработал (х1), происходит переход к следующему состоянию механизма. Если датчик не сработал, происходит ожидание, то есть возврат к процедуре z1 и ее повторное выполнение.
Рисунок 49 – вершина графа
Рассмотрим граф, описывающий работу револьверной головки (рис.50).
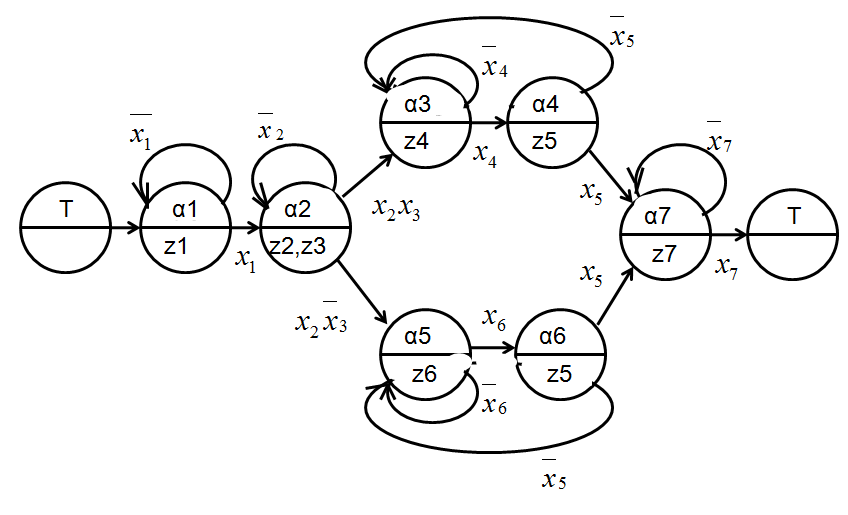
Рисунок 50 – Сеть Петри, описывающая процесс разворота револьверной головки
Вершина Т показывает, что работа механизма начинается по команде Т.
 - в этой вершине выполняется процедура z1проверки блокировок со стороны других вспомогательных механизмов;
- в этой вершине выполняется процедура z1проверки блокировок со стороны других вспомогательных механизмов;
 - блокировки отсутствуют;
- блокировки отсутствуют;
 - блокировки есть;
- блокировки есть;
 - в этой вершине запускаются две процедуры – z2и z3:
- в этой вершине запускаются две процедуры – z2и z3:
z2 – разжим фиксатора;
z3 – определение направления вращения револьверной головки;
 - фиксатор разжат;
- фиксатор разжат;
 - фиксатор не разжат;
- фиксатор не разжат;
 - вращение по часовой стрелке;
- вращение по часовой стрелке;
 - вращение против часовой стрелки;
- вращение против часовой стрелки;
 - здесь происходит выполнение поворота на 1 позицию по часовой стрелке (z4);
- здесь происходит выполнение поворота на 1 позицию по часовой стрелке (z4);
 - поворот выполнен;
- поворот выполнен;
 - поворот не выполнен;
- поворот не выполнен;
 - здесь выполняется процедура z5 проверки соответствия номера инструмента, заданного в команде Т, текущему номеру гнезда револьверной головки, находящемуся в позиции захвата.
- здесь выполняется процедура z5 проверки соответствия номера инструмента, заданного в команде Т, текущему номеру гнезда револьверной головки, находящемуся в позиции захвата.
 - номера совпали;
- номера совпали;
 - номера не совпали.
- номера не совпали.
Вершины  аналогичны и , но вращение – против часовой стрелки. Если номера инструмента и гнезда совпадают, происходит переход к вершине
аналогичны и , но вращение – против часовой стрелки. Если номера инструмента и гнезда совпадают, происходит переход к вершине  - зажим фиксатора. Если фиксатор зажался (
- зажим фиксатора. Если фиксатор зажался ( ), то цикл работы механизма закончен, о нем сообщается УЧПУ обратным сигналом Т.
), то цикл работы механизма закончен, о нем сообщается УЧПУ обратным сигналом Т.
Работу устройства управления электроавтоматикой рассматривают в 3-х режимах: автоматический, режим ручного управления, режим нерегулярных ситуаций. При этом каждый из режимов описывается с помощью собственного графа.








