 2018-01-21
2018-01-21 3638
3638Рисунок 6 – Строение саркомера
На концах нитей миозина есть головки, с помощью которых нити миозина при сокращении мышцы цепляются за нити актина и подтягивают их к себе. Актин представляет собой двойную спираль с активными центрами, к которым могут присоединяться головки миозина. В покое эти центры закрыты молекулами тропомиозина, находящимися между двумя нитями актина и связанными, в свою очередь, с глобулами тропонина.
Процесс мышечного сокращения запускается изменением концентрации Са2+ в саркоплазме, т.е. внутри миофибриллы. Внутриклеточный кальций хранится в особых субклеточных структурах – саркоплазматическомретикулуме, представляющим собой систему продольных трубочек и поперечных цистерн. При поступлении нервного импульса проницаемость мембраны саркоплазматического ретикулума для Са2+ увеличивается, и он поступает в саркоплазму, где взаимодействует с тропонином. При этом конформациятропонина меняется, он сдвигает молекулы тропомиозина, освобождая центры актина, к которым могут присоединиться головки миозина.
Сокращение мышечного волокна происходит благодаря скольжению актиновых нитей вдоль миозиновых. Головки миозина прикрепляются к актиновым нитям поочередно, а затем, после осуществления тянущего усилия – «гребка», отделяются от этого участка актина, чтобы тотчас прикрепиться к следующему. На этот процесс расходуется энергия АТФ: на 1 гребок – 1 молекула. Поскольку в процессе мышечного сокращения происходит преобразование электрической энергии нервного импульса в механическую работу, этот механизм получил название электромеханического сопряжения.
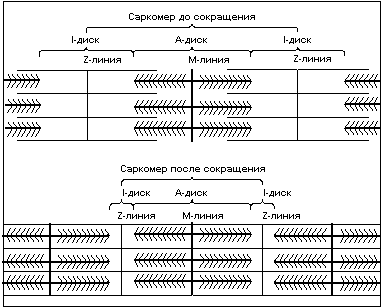
Рисунок 7 – Работа саркомера
Существует два вида мышечных сокращений – одиночное и тетаническое. Одиночное мышечное сокращение является единственным видом сокращений для сердечной мышцы, Такое сокращение, длящееся» 100 мс, имеет форму волны (см. рис.) и включает три фазы: 1 – латентный период (от 2-3 до 10 мс), длящийся от момента нанесения раздражения до начала сокращения, 2 – фаза укорочения или сокращения (40-50 мс) и 3 – фаза расслабления (около 50мс). В естественных условиях импульсы поступают не одиночно, а сериями не менее 15-50 имп/с, на что мышца отвечает возникновением тетанического сокращения (тетануса). В его основе лежит явление суммации нескольких одиночных сокращений. В зависимости от частоты импульсов различают зубчатый и гладкий тетанус.

Рисунок 5 – Виды мышечных сокращений:
А – фазы одиночного сокращения; Б – одиночное и тетанические сокращения

Зубчатый тетанус (неполный) возникает в том случае, когда каждый последующий импульс приходит в фазу расслабления мышцы.

Если частота раздражения выше, и каждый последующий импульс приходит в фазу укорочения мышцы, то происходит полная суммация, и тетаническое сокращение носит слитный характер – гладкий тетанус (полный).

В целостном организме мотонейроны посылают пачки потенциалов действия к двигательным единицам, которые в ответ сокращаются тетанически. Скелетные мышцы находятся в состоянии постоянного тонуса вследствие постоянной фоновой импульсации из моторных зон ЦНС.
57. Классификация движений (автоматизированные, произвольные, ориентационные, манипуляторные движения).
Все многообразие форм движения животных и человека основывается на физических законах перемещения тел в пространстве. При классификации движений необходимо учитывать конкретные целевые функции, которые должна выполнять двигательная система.
В самом общем виде таких функций четыре:
1. поддержание определенной позы;
2. ориентация на источник внешнего сигнала для его наилучшего восприятия;
3. перемещения тела в пространстве;
4. манипулирование внешними вещами или другими телами.
Иерархия уровней мозгового управления движениями также находится в зависимости от требований к структуре движения. Установлено, что подкорковый уровень связан с набором врожденных или автоматизированных программ.
Автоматизированные и произвольные движения. Проблема разделения указанных категорий движения сложна. Во многих случаях грань между автоматизированным и произвольно контролируемым действием очень подвижна. Более того, суть обучения двигательным навыкам составляет переход от постоянно контролируемой цепочки более-менее осознанно разделяемых двигательных действий к автоматизированной слитной "кинетической мелодии", которая исполняется со значительно меньшими энергетическими затратами. В то же время достаточно небольшого изменения хотя бы одного из компонентов автоматизированного навыка, чтобы этот навык перестал быть полностью автоматизированным, и потребовалось вмешательство произвольной регуляции.
Для того чтобы избежать трудностей, возникающих при попытках разделить двигательные акты на "автоматические " и "волевые", английский невропатолог Х. Джексон в начале века предложил иерархическую классификацию всех двигательных актов (т.е. движений и их комплексов) от "полностью автоматических" до "совершенно произвольных". Эта классификация оказывается полезной и в настоящее время. Так, например, дыхание представляет собой в значительной степени автоматический комплекс движений грудной клетки и мышц плечевого пояса, сохраняющийся даже при самом глубоком сне и в состоянии наркоза, когда все остальные движения полностью подавлены. В случае, если при помощи тех же самых мышц осуществляется кашлевой рефлекс или движения туловища, то подобный двигательный акт "менее автоматичен", а при пении или речи эти мышцы участвуют уже в "совершенно неавтоматическом " движении. Из данного примера ясно также, что "более автоматические " движения связаны главным образом с врожденными центральными поведенческими программами, тогда как "менее автоматические" или "совершенно произвольные" движения появляются в процессе накопления жизненного опыта.
Ориентационные движения. Система движений такого типа связана с ориентацией тела в пространстве и с установкой органов чувств в положение, обеспечивающее наилучшее восприятие внешнего стимула. Примером первого может служить функция поддержания равновесия, второго — движения фиксации взора. Фиксация взора выполняется в основном глазодвигательной системой. Изображение неподвижного или движущегося предмета фиксируется в наиболее чувствительном поле сетчатки. Координация движения глаз и головы регулируется специальной системой рефлексов.
Манипуляторные движения — яркий пример произвольных движений, которые обусловлены мотивацией. Эти движения локальны и решают следующие задачи:
выбор ведущего мышечного звена;
компенсация внешней нагрузки;
настройка позы;
соотнесение координат цели и положения собственного тела.
Отличительной чертой манипуляторных движений является их зависимость от центральной программы, поэтому ведущая роль в их осуществлении играют фронтальная кора, базальные ганглии и мозжечок. Ведущая роль в программировании быстрых манипуляторных движений принадлежит мозжечковой системе, а в программировании медленных — базальным ганглиям.
58. Схема тела.
Термином "схема тела" обозначают систему обобщенной чувствительности собственного тела в покое и при движении, пространственных координат и взаимоотношений отдельных частей тела.
Базой этих процессов служит анатомически закрепленная "карта" тела, поэтому такие процессы составляют лишь основу статического образа тела. Для его формирования необходимо соотнести эту информацию с положением тела по отношению к силе земного притяжения и взаиморасположением функциональных блоков тела в системе трех пространственных плоскостей. Вестибулярная система воспринимает перемещение всего тела вперед-назад, вправо-влево, вверх-вниз, а соответствующая информация поступает в теменные зоны коры, где происходит ее объединение с информацией от скелетно-мышечного аппарата и кожи. Туда же поступает импульсация от внутренних органов, которая также участвует в создании на бессознательном уровне особого психофизиологического образования — статического образа тела.
Таким образом, статический образ тела представляет собой систему внутримозговых связей, основанную на врожденных механизмах и усовершенствованную и уточненную в онтогенезе. Выполняя ту или иную деятельность, человек меняет взаиморасположение частей тела, а обучаясь новым двигательным навыкам, он формирует новые пространственные модели тела, которые и составляют основу динамического образа тела. В отличие от статического динамический образ тела имеет значение лишь для данного конкретного момента времени и определенной ситуации, при изменении которой он сменяется новым. Динамический образ базируется на текущей импульсации от чувствительных элементов кожи, мышц, суставов и вестибулярного аппарата. Не исключено, что скорость и точность формирования динамического образа тела — фактор, определяющий способность человека быстро овладевать новыми двигательными навыками.
59. Управление позой и локомоцией. Обратная связь.
Поза тела определяется совокупностью значений углов, образуемых суставами тела человека в результате ориентации в поле тяготения. Механизм позы складывается из двух составляющих: фиксации определенных положений тела и конечностей и ориентации частей тела относительно внешних координат (поддержание равновесия). Исходная поза тела накладывает некоторые ограничения на последующее движение. К низшим механизмам управления позой относятся спинальные, шейные установочные и некоторые другие рефлексы, к высшим — механизмы формирования "схемы тела".
В мозге происходит постоянное взаимодействие того и другого образов тела, осуществляется сличение динамического образа с его статическим аналогом. В результате этого формируется субъективное ощущение позы, отражающее не только положение тела в данный момент времени, но и возможные его изменения в непосредственном будущем. Если согласование не достигнуто, то вступают в действие активные механизмы перестройки позы. Итак, для того чтобы сменить позу, необходимо сравнить закодированный в памяти статический образ тела с его конкретной вариацией — динамическим образом тела.
Термин локомоция означает перемещение тела в пространстве из одного положения в другое, для чего необходима определенная затрата энергии. Развиваемые при этом усилия должны преодолеть, прежде всего, силу тяжести, сопротивление окружающей среды и силы инерции самого тела. На локомоцию влияют характер и рельеф местности. Во время локомоции организму необходимо постоянно поддерживать равновесие.
Примеры локомоции - ходьба или бег, которые отличаются стереотипными движениями конечностей, причем для каждой формы локомоции характерны две фазы шага: фаза опоры и фаза переноса. Ходьба человека характеризуется походкой, т.е. присущими ему особенностями перемещения по поверхности. В спинном мозге обнаружена цепь нейронов, выполняющая функции генератора шагания. Она ответственна за чередование периодов возбуждения и торможения различных мотонейронов и может работать в автоматическом режиме. Элементарной единицей такого центрального генератора является генератор для одной конечности. Не исключено, что у каждой мышцы, управляющей одним суставом, есть собственный генератор. Когда человек движется, такие генераторы работают в едином режиме, оказывая друг на друга возбуждающее влияние.
Очень важную роль в этом контроле играет мозжечок, который обеспечивает коррекцию и точность постановки конечностей на основе сравнения информации о работе спинального генератора и реальных параметров движений. Предполагается, что мозжечок программирует каждый следующий шаг на основе информации о предыдущем. Другой важнейший уровень мозга, куда направляется информация о характере выполнения движения, это большие полушария с их таламическими ядрами, стриопаллидарной системой и соответствующими зонами коры головного мозга.
Обратная связь.
Большое значение на этих уровнях контроля локомоции имеет обратная связь, т.е. информация о результатах выполняемого движения. Она поступает от двигательных аппаратов к соответствующим мозговым центрам. Многие движения постоянно корректируются, благодаря показаниям соответствующих сенсорных датчиков, расположенных в скелетных мышцах и передающих информацию в разные отделы мозга вплоть до коры. Движения, базирующиеся на врожденных координациях, в меньшей степени требуют обратной связи от локомоторного аппарата. Наряду с этим все новые формы движения, в основе которых лежит формирование новых координационных отношений, всецело зависят от обратной связи со стороны двигательного аппарата.
Очень важно, что сенсорные коррекции способны изменить характер движения по ходу его осуществления. Без этого механизма человек не имел бы возможности овладевать новыми локомоторными актами.
60. Иерархия форм двигательной активности по Н.А. Бернштейну
Наиболее полно проблема иерархической организации движений человека в контексте активного приспособительного поведения была поставлена и разработана в трудах выдающегося отечественного физиолога Н.А. Бернштейна. Он разработал теорию уровней построения движений. Причем под уровнями он понимал морфологические отделы нервной системы: спинной и продолговатый мозг, подкорковые центры и кору больших полушарий. Каждому уровню соответствует свой тип движений. Всего Н.А. Бернштейн выделил пять уровней: А, В, С, Д, Е.
1. Уровень А — эволюционно наиболее древний и созревающий раньше других руброспинальный уровень. У человека он не имеет самостоятельного значения, но он определяет мышечный тонус и участвует в обеспечении любых движений совместно с другими уровнями. Есть некоторые формы двигательной активности, которые осуществляются только за счет данного уровня (к их числу относятся непроизвольные примитивные движения, например, дрожание пальцев, стук зубов от холода). Этот уровень начинает функционировать с первых недель жизни новорожденного.
2. Уровень В — таламопалидарный уровень, обеспечивает переработку сигналов от мышечно-суставных рецепторов, которые сообщают о взаимном расположении частей тела. Этот уровень принимает участие в организации движений более сложного типа, которые, однако, не требуют учета особенностей внешнего пространства. Это могут быть произвольные движения лица и тела — мимика и пантомимика, вольная гимнастика и др. Этот уровень начинает функционировать уже во втором полугодии жизни ребенка.
3. Уровень С — определяется как уровень пространственного поля или пирамидно-стриальный уровень. На этот уровень поступает информация о состоянии внешней среды от экстерорецепторных анализаторов. Поэтому этот уровень отвечает за построение движений, приспособленных к пространственным свойствам объектов — к их форме, положению, весу и другим особенностям. Среди них все виды локомоции (перемещения), тонкая моторика рук и другие. Это уровень, в обеспечении которого наряду с подкорковыми структурами принимает участие кора. Поэтому его созревание, начинаясь очень рано — на первом году жизни, продолжается на протяжении всего детства и даже юности.
4. Уровень Д — уровень предметных действий. Он функционирует при обязательном участии коры (теменных и премоторных зон) и обеспечивает организацию действий с предметами. Это специфически человеческий уровень организации двигательной активности, поскольку к нему относятся все виды орудийных действий и манипуляторных движений. Характерная особенность движений этого уровня состоит в том, что они не только учитывают пространственные особенности, но и согласуются с логикой использования предмета. Это уже не только движения, но и в значительно большей степени действия, потому что используемые здесь моторные программы складываются из гибких взаимозаменяемых звеньев. Поскольку этот уровень обеспечивается согласованной активностью разных зон коры, его функциональные возможности будут определяться динамикой созревания как самих зон, так и возрастными особенностями межзонального взаимодействия.
5. Уровень Е — высший уровень организации движений, обеспечивает интеллектуализированные двигательные акты: работу артикуляционного аппарата в звучащей речи, движения руки при письме, а также движения символической или кодированной речи (язык жестов глухонемых, азбука Морзе). Нейрофизиологические механизмы этого уровня обеспечиваются высшими интегративными возможностями коры больших полушарий, поэтому созревание коры, как и в предыдущем случае, имеет решающее значение для его функционирования.
61. Программирование движений.
Каждому целенаправленному движению предшествует формирование программы, которая позволяет прогнозировать изменения внешней среды и придать будущему движению адаптивный характер. Результат сличения двигательной программы с информацией о движении, передающейся по системе обратной связи, является основным фактором перестройки программы. Последнее зависит от мотивированности движения, его временных параметров, сложности и автоматизированности.
Мотивации определяют общую стратегию движения. Каждый конкретный двигательный акт нередко представляет собой шаг к удовлетворению той или иной потребности. Биологические мотивации приводят к запуску либо жестких, в значительной степени генетически обусловленных моторных программ, либо формируют новые сложные программы. Однако мотивация определяет не только цель движения и его программу, она же обуславливает зависимость движения от внешних стимулов. В качестве обратной связи здесь выступает удовлетворение потребности.
Двигательная команда определяет, как будет осуществляться запрограммированное движение, т.е. каково распределение во времени тех эфферентных залпов, направляемых к мотонейронам спинного мозга, которые вызовут активацию различных мышечных групп.
Особую роль в программировании движения играют ассоциативные системы мозга, она участвует в формировании интегральной схемы тела. При этом все части тела соотносятся не только друг с другом, но и с вестибулярными и зрительными сигналами. Также она регулирует направление внимания к стимулам, поступающим из окружающей среды так, чтобы учитывалась ориентация всего тела относительно этих стимулов. Эта система "привязана" к настоящему моменту времени и к анализу пространственных взаимоотношений разномодальных признаков.
Ассоциативная система отвечает за переработку информации о мотивационом состоянии и происходящих в организме вегетативных изменениях. Фронтальная ассоциативная область коры опосредует мотивационные влияния на организацию поведения в целом благодаря связям с другими ассоциативными областями и подкорковыми структурами. Таким образом, фронтальные отделы коры больших полушарий, контролируя состояние внутренней среды организма, сенсорные и моторные механизмы мозга, обеспечивают гибкую адаптацию организма к меняющимся условиям среды.
62. Функциональная структура произвольного движения
Среди общих принципов управления движениями выделяют проблему организации единовременной команды к исполнительным аппаратам. Основной целью системы, формирующей эту команду, будет координация всех компонентов команды.
Для того чтобы выполнить эту задачу, система должна осуществлять следующие процессы:
-идентификацию состояния системы,
-определение целевой функции ведущего кинематического звена,
-подстройку соотношения активности мышц—антагонистов.
Последнее производится автоматически благодаря системе спинальных рефлексов. Идентификация же состояния двигательной системы обеспечивается двумя путями: оценкой реакции системы на внешнее воздействие.ЦНС располагает значительным числом генетически закрепленных программ типа локомоторной программы, базирующейся на активности спинального генератора шагания. Такие простые программы объединяются в более сложные системы типа поддержания вертикальной позы, что происходит в процессе научения при участии структур переднего мозга.
Одной из задач управления движением является выбор ведущего кинематического звена. Этот выбор предопределен исходной позой, перестройка которой всегда опережает локальное движение. Информация об исходной позе будет перераспределять активность сенсомоторной коры. Подкорковые управляющие структуры (полосатое тело и мозжечок) формируют новое движение почти исключительно путем модификации состояния командных интернейронов во врожденных подсистемах управления.
Для формирования новых координационных отношений, необходимо подавить активность командных нейронов врожденных программ и сформировать параллельный управляющий канал. Таковым является корково—спинномозговой путь, степень развития которого определяет роль манипуляторных движений в общем двигательном поведении. Морфологической основой организации тонких манипуляторных движений является сенсомоторная кора с ее структурными модулями и объединениями модулей разного порядка сложности. Все элементы вышепоименованных систем одномоментно связаны между собой, поэтому изменение любого звена влечет за собой сдвиг состояния всей двигательной системы в целом.
Ориентационные движения и следящие движения глаз, головы, конечностей представляют собой задачу более высокого порядка, чем координация движений сегментов тела. Эти движения зависят от функционирования таламопариетальной ассоциативной системы мозга.
Самой сложной, филогенетически самой молодой является способность формировать последовательность движений и предвидеть ее реализацию. Решение этой задачи связано с фронтальной ассоциативной системой, которая запоминает и хранит в памяти такие последовательности движений.
Высшим отражением этого кодирования у человека является вербализация основных понятий движения.Одно из основных проявлений поражений лобных долей человека состоит в нарушении грамматической структуры речи и невозможности использования вербальных команд для построения последовательности движений.
Всеобщей закономерностью работы системы управления движениями является использование обратной связи. Сюда входит не только проприоцептивная обратная связь от начавшегося движения, но и активация систем поощрения или наказания. Кроме того, включается и внутренняя обратная связь, т. е. информация об активности нижележащих уровней двигательной системы или эфферентная копия самой двигательной команды. Этот вид обратной связи необходим для выработки новых двигательных координаций.
63. Необходимость и актуальность концепции функциональных систем П.К. Анохина. Системообразующие факторы целенаправленного поведения. Типы функциональных систем.
П. К. Анохин в теории функциональной системы разработал методологический подход к решению вопроса о том, как могут взаимодействовать различные структурные образования в целостной работе живого организма, решающего адаптационные задачи.
Вопрос: Каким образом организм, представляющий собой совокупность органов и систем, выполняет свои задачи? Каким образом достигает результата с позиции классической физиологии, в том числе учения о безусловных и условных рефлексах Павлова?
Анохин, предвосхищая развитие кибернетики, предложил своюконцепциюдля объяснения систем управления в живых организмах.
Она получила название ТЕОРИЯ ФУНКЦИОНАЛЬНЫХ СИСТЕМ (ТФС).
В настоящее время это одна из ведущих теорий, объясняющих принципы нервной регуляции деятельности внутренних органов и систем. Кроме того, она объясняет целенаправленность деятельности человека.
Физиологическая система- устоявшаяся.
Функциональная система- совокупность физиологических систем.
ВНД их контролирует.
По Анохину в организме имеется управляющее устройство- центральная архитектура, которая управляет многими органами и системами, входящими в данную функциональную систему и работающую для полезного результата.
Полезный результат (результат действия)- это полезный системообразующий фактор, который направлен для достижения результата.
С точки зрения ТФС можно говорить о четырех вариантах результата:
1. Показатели внутренней среды организма- определяющие нормальный метаболизм в тканях (АД, РН крови, парциальное насыщение кислородом, углекислым газом).
2. Результаты поведенческой деятельности, удовлетворяющие биологические потребности организма (в воде, в пище).
3. Результаты стадной деятельности животных, удовлетворяющие потребности сообщества (сохранение вида).
4. Результаты социальной и духовной деятельности человека, удовлетворяющие его потребности, обусловленные его положением в общественно-экономической формации.
По Анохину любая ФС состоит из:
1. Полезный приспособительный результат- это ведущее звено ФС.
2. Рецептор результата- в рамках кибернетики- это измеряемое устройство.
3. Обратная афферентация– информация, идущая от рецепторов в центр.
4. Центральная архитектура- нервные центры (центры управления).
5. Исполнительные устройства – компоненты.
ФС – это динамическое образование, если результат полезен, система может быть ликвидирована, если не полезен, она может быть перестроена, уточнена, изменена.
Различают функциональные системы первого и второго типа.
Функциональная система первого типа – функциональная система, обеспечивающая постоянство параметров внутренней среды за счет системы саморегуляции, акты которой не выходят за пределы самого организма. Основные 2 константы гомеостаза это осмотическое давление и Ph крови. Функциональная система первого типа автоматически компенсирует возникающие колебания кровяного давления, температуры тела и других параметров.
Функциональная система второго типа использующая внешнее звено саморегуляции; обеспечивающая адаптивный эффект через связь с внешним миром за пределами организма и изменение поведения.
64. Центральная архитектоника функциональных систем.
Центральная архитектоника функциональных систем, определяющих целенаправленные поведенческие акты различной степени сложности, складывается из следующих последовательно сменяющих друг друга стадий (блоков):
1. Блок афферентного синтеза-
На основе имеющего опыта и с учетом текущих потребностей, этот блок просеивает поступающую информацию и отбирает наиболее нужную.Блок состоит из:
А. Память
Б. Потребность
В. Обстановочная афферентация
Г. Пусковая афферентация
2. Блок принятия решения-
В этом блоке на основе поступившей информации и на основе жизненного опыта с учетом потребности принимаем решение о выполнении конкретного действия ради получения полезного результата. Копия этого решения передается в блок акцептора результата действия, а основная информация о принятом решении передается в блок эфферентного синтеза.
3. Блок эфферентного синтеза-
Содержит набор стандартных программ, обработанных на основе видового и индивидуального опыта. Задача блока- в выборе наиболее адекватной программы действия с целью достижения полезного результата.
4. Блок акцептора результата действия-
Блок хранит копию принятого действия и сравнивает информацию о конкретном результате действия с информацией о планируемом результате действия.
Информация поступает в этот блок от двух источников:Блока принятия решения и от блока оценки результата действия; если достигается соответствие между планируемым результатом и достигнутом, данная ФС ликвидируется.
5. Блок оценки результатов действия
С помощью различных сенсорных систем получает информацию о достигнутом результате на данный момент времени и по каналу связи доставляет эту информацию в блок акцептора результата действия и в блок афферентного синтеза- обратная афферентация.

