 2017-11-01
2017-11-01 933
933
Предположим, что нам зачем-то понадобилась информация о значениях линейной скорости маятника и полном пройденном пути. Если это делать непосредственно в описании маятника, то понадобятся всего лишь дополнительные уравнения
 , где
, где  - линейная скорость,
- линейная скорость,  - полный путь.
- полный путь.
Однако, может оказаться, что такой определитель скорости и пути полезен не только для маятников, а для любых движущихся в плоскости объектов. Поэтому мы создадим новый класс «ИзмерительVS», функционирование которого определяется системой уравнений
 , где
, где  - текущие координаты измеряемого объекта,
- текущие координаты измеряемого объекта,  - функция дифференцирования аргумента. Таким образом, новый блок также является чисто непрерывным.
- функция дифференцирования аргумента. Таким образом, новый блок также является чисто непрерывным.
Однако, он не может быть изолированной системой, точно так же, как и измеряемый объект – текущие координаты этого объекта как-то должны передаваться на блок измерения. Поэтому переменные и в блок «ИзмерительVS», и в блоке «Маятник» должны быть объявлены как внешние и между ними должны быть созданы связи. В данном случае направленность связей не вызывает сомнения: переменные должны быть объявлены как выходы в блоке «Маятник» (Рис 16а) и как входы в блоке «ИзмерительVS» (Рис 16б). Моделируемая система включает в себя по одному экземпляру того и другого блоков, соединенные двумя связями (Рис 16в).

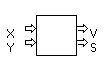
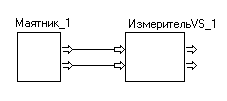
а) б) в)
Рис 16
Временная диаграмма для скоростей показана на Рис 17.
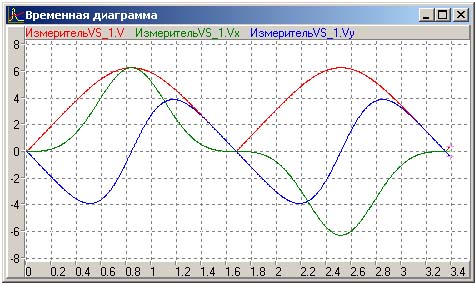
Рис 17
Каким же образом функционирует компонентная модель? Блоки функционируют параллельно в модельном времени. Это означает, что их главные карты состояний выполняются как параллельные дискретные процессы, а текущие непрерывные поведения – системы уравнений – объединяются в одну глобальную систему уравнений с учетом связей, которые рассматриваются как дополнительные уравнения. В данном случае глобальная система уравнений получается простым механическим сложением системы уравнений движения маятника и системы уравнений измерителя, к которым добавляются два уравнения связей:

а) б)
Рис 18
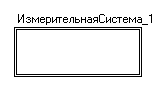
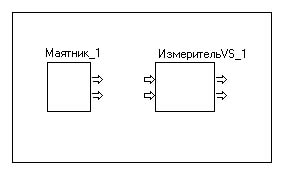
Следует отметить, что функциональные связи – это всего лишь удобный и наглядный способ записи уравнений взаимодействия блоков. Вместо схемы на Рис 16в можно создать блок-контейнер класса «Измерительная_система» (Рис 18а), внутрь него поместить как локальные блоки маятник и измеритель безо всяких связей (Рис 18б), а в качестве непрерывного поведения блока-контейнера поместить те же уравнения связи
Это возможно, поскольку внешние переменные локальных блоков видимы в описании охватывающего блока-контейнера. Таким образом, локальные блоки могут взаимодействовать и помимо явных связей «по воздуху» - через уравнения блока-контейнера. Иногда это может быть удобно. Например, в задаче о взаимодействии  заряженных частиц каждая частица связана с каждой, т.е. число связей пропорционально
заряженных частиц каждая частица связана с каждой, т.е. число связей пропорционально  . При достаточно большом рисование функциональных связей становится затруднительным (мы полагаем, что постоянно, т.е. рассматривается система со статической структурой). В данном случае гораздо удобнее связать с охватывающим блоком-контейнером суммарное электрическое поле, напряженность которого в любой точке и будет вычисляться в зависимости от совокупного положения частиц в системе уравнений блока-контейнера.
. При достаточно большом рисование функциональных связей становится затруднительным (мы полагаем, что постоянно, т.е. рассматривается система со статической структурой). В данном случае гораздо удобнее связать с охватывающим блоком-контейнером суммарное электрическое поле, напряженность которого в любой точке и будет вычисляться в зависимости от совокупного положения частиц в системе уравнений блока-контейнера.
Замечание.
Следует помнить, что глобальная система уравнений получается простым механическим сложением системы уравнений компонент только для ориентированных блоков. Для неориентированных блоков получение глобальной системы уравнений является в общем случае непростой задачей.
Объектный подход.
Взглянем еще раз на Рис 18. В описании класса «ИзмерительнаяСистема» появились экземпляры классов «Маятник» и «ИзмерительVS» с именами «Маятник_1» и «ИзмерительVS_1» соответственно. Их можно рассматривать как особые внутренние переменные типа «активный динамический объект». В описании класса «ИзмерительнаяСистема» будут видимы все внешние переменные этих объектов.
RS-триггер.
Данная модель как раз иллюстрирует принцип «разделения сложного на части»: не так-то просто правильно написать закон функционирования триггера, в то же время известна его схема, состоящая из двух схем ИЛИНЕ и двух фильтрующих повторителей. Каждый элемент этой схемы является достаточно простым и понятным устройством, а их совокупное поведение воспроизводится автоматически. Эта несложная модель иллюстрирует и еще один важный момент: в схеме находятся по два экземпляра одного и того же класса (два экземпляра класса ИЛИНЕ и два экземпляра класса ФП), причем экземпляры повторителей различаются значением параметра «Интервал_фильрации».
На этом же примере мы проиллюстрируем использование блочного подхода при оборудовании виртуального стенда: для «испытаний» созданного нами триггера мы создадим генератор тестовых сигналов и соединим его выходы со входами испытуемого триггера..








