 2017-11-01
2017-11-01 2221
2221
| Сечение, мм2 | Провода | Кабели четырехжильные до 1000 В | ||
| Открыто | В трубе | Открыто | В земле | |
| 2,5 | — | — | ||
| — |
Таблица6. Технические данные некоторых типов машин постоянного тока
| Тип машины | Uном, В | Рном, кВт | nном, об/мин | Iном, А | 2р | Ra+Rдоп, Ом | Rпс, Ом | Rш, Ом |
| Генераторы | ||||||||
| П-41 | 2,7 | 23,4 | 0,558 | 0,136 | 68,8 | |||
| 2,7 | 11,7 | 2,23 | 0,488 | |||||
| П-51 | 43,4 | 0,191 | 0,03 | |||||
| 21,7 | 0,78 | 0,112 | ||||||
| П-61 | 39,1 | 0,35 | 0,04 | |||||
| П-62 | 11,5 | 50,0 | 0,222 | 0,028 | ||||
| П-71 | 69,5 | 0,3 | 0,0115 | |||||
| П-72 | 0,1745 | 0,00725 | ||||||
| П-81 | 0,1445 | 0,00475 | 69,5 | |||||
| П-82 | 0,0863 | 0,00308 | 27,2 | |||||
| П-91 | 0,0504 | 0,00304 | 35,8 | |||||
| Электродвигатели | ||||||||
| П-41 | 1,5 | 18,2 | 0,657 | 0,024 | ||||
| 1,0 | 1,21 | 0,033 | ||||||
| 6,0 | 0,36 | 0,007 | ||||||
| 3,2 | 18,4 | 1,032 | 0,0328 | |||||
| П-42 | 4,5 | 0,209 | 0,0064 | 73,2 | ||||
| 7,4 | 43,5 | 0,197 | 0,0085 | |||||
| 3,8 | 25,4 | 0,78 | 0,0392 | |||||
| 2,2 | 13,3 | 1,75 | 0,039 | |||||
| П-51 | 3,2 | 37,4 | 0,242 | 0,0073 | 45,2 | |||
| 2,2 | 0,472 | 0,0073 | 45,2 | |||||
| 11,0 | 0,135 | 0,0044 | ||||||
| 6,0 | 33,2 | 0,472 | 0,0073 | |||||
| 3,2 | 18,3 | 1,051 | 0,0044 | |||||
| П-71 | 32,0 | 0,045 | 0,00125 | 60,5 | ||||
| 19,0 | 0,124 | 0,0046 | 76,8 | |||||
| 10,0 | 0,3 | 0,0105 | ||||||
| П-81 | 32,0 | 0,074 | 0,0026 | 95,5 | ||||
| 14,0 | 0,244 | 0,01 |
Методические указания к решению задач 18—27
Задачи этой группы относятся к теме «Электрические машины постоянного тока». Для их решения необходимо изучить материал, приведенный в указателе литературы к теме, решить рекомендуемые задачи и ознакомиться с типовыми примерами 17—21. Сведения о некоторых типах машин постоянного тока даны в табл. 6.
Необходимо иметь представление о связи между напряжением на выводах U, Э.Д.С. Е и падением напряжения  в обмотке якоря для генератора и двигателя: для генератора
в обмотке якоря для генератора и двигателя: для генератора  ; для двигателя
; для двигателя  .
.
Для определения электромагнитного или полного момента, развиваемого двигателем, можно пользоваться формулой, приведенной в учебнике:
 |
Здесь магнитный поток выражен в веберах (Вб), ток якоря в амперах I=Iа (А), момент получаем в ньютон - метрах (Н·м). Если магнитный поток машины неизвестен, то электромагнитный момент можно найти, определив из формулы для противо - Э.Д.С. магнитный поток и подставив его в

формулу для Мэм: Рис. 1

Здесь Рэм=ЕIа — электромагнитная мощность, Вт; ω — угловая скорость вращения, рад/с.
Аналогично можно вывести формулу для определения полезного номинального момента (на валу):

Здесь Рном выражаем в Вт; Мном получаем в Н·м.
Пример 7. Генератор с независимым возбуждением (рис. 88) работает в номинальном режиме при напряжении на выводахUH0M =220 В. Сопротивление обмотки якоря Rа= 0,2 Ом; сопротивление нагрузки Rн = 2,2 Ом; сопротивление обмотки возбуждения RB= 55 Ом. Напряжение для питания обмотки возбуждения UВ=110 В. Номинальная частота вращения якоря п ном=1200 об/мин. Определить: 1) Э.Д.С. генератора; 2) силу тока, отдаваемого потребителю; 3) силу тока в обмотке возбуждения; 4) полезную мощность, отдаваемую генератором; 5) электромагнитный тормозной момент, преодолеваемый приводным двигателем.
Решение.1. Ток, отдаваемый в нагрузку:

2. Ток в обмотке возбуждения

3. Ток в обмотке якоря

4. Э.Д.С. генератора

5. Полезная мощность, отдаваемая генератором


Рис. 2
6. Электромагнитная мощность и электромагнитный тормозной момент:

Пример 8. Генератор с параллельным
возбуждением (рис. 89) рассчитан на напряжение UH0M =220 В и имеет сопротивление обмотки якоря Ра=0,08 Ом, сопротивление обмотки возбуждения
Rв=55 Ом. Генератор нагружен на сопротивление Rн= 1,1 Ом. К.П.Д. генератора  = 0,85.
= 0,85.
Определить:
1) токи в обмотке возбуждения Iв, в обмотке якоря Iа и в нагрузке Iн.
2) Э.Д.С. генератора Е;
3) полезную мощность Р2;
4) мощность двигатели для вращения генератора Р1;
5) электрические потери в обмотках якоря Ра и возбуждения Рв;
6) суммарные потери в генераторе;
7) электромагнитную мощность Pэm.
Решение.I. Токи в обмотке возбуждении, нагрузке и якоре:
Iв=Uном/Rв=220/55=4 А; Iн= Uном/Rн=220/1,1=200 А; Iа= Iв + Iн= 4+200=204 А
2. Э.Д.С. генератора:
Е = Uном + Iа · Rа = 220 + 204 · 0,08 = 236,3 В.
3. Полезная мощность:
Р2 = Uном · Iн = 220 · 200 = 44000 Вт = 44 кВт.
4. Мощность приводного двигателя для вращения генератора:
Р1 = Р2/  =44/0,85=52 кВт.
=44/0,85=52 кВт.
5. Электрические потери в обмотках якоря и возбуждения
Ра=  · Rа=2042·0,08=3320 Вт = 3,32 кВт;
· Rа=2042·0,08=3320 Вт = 3,32 кВт;
Рв=  · Rв=42·55=880 Вт = 0,88 кВт;
· Rв=42·55=880 Вт = 0,88 кВт;
6. Суммарные потери мощности в генераторе:
SР = Р1 - Р2 = 52 – 44 = 8 кВт
7. Электромагнитная мощность, развиваемая генератором:
Рэм = Е·Iа = 236,3· 204 = 48300 Вт = 48,3 кВт.
Пример 9. Электродвигатель постоянного тока с параллельным возбуждением (рис. 90) рассчитан на номинальную мощностьРном=10 кВт и номинальное напряжение Uном=220 В. Частота вращения якоря п = 3000 об/мин.
Двигатель потребляет из сети ток I=63 А. Сопротивление обмотки возбуждения
Rв=85 Ом, сопротивление обмотки якоря Rа=0,3 Ом.
Определить: 1) потребляемую из сети мощность P1;
2) К.П.Д. двигателя  дв;
дв;
3) полезный вращающий момент М;
4) ток якоря Iа;
5) противо-Э.Д.С. в обмотке якоря Е;
6) суммарные потери в двигателе SР;
7) потери в обмотках якоря Ра и
возбуждения Рв.
Решение. 1. Мощность, потребляемая двигателем из сети:


Рис. 3
2. К.П.Д. двигателя

3. Полезный вращающий момент (на валу)

4. Для определения тока якоря предварительно находим ток возбуждения

Ток якоря

5. Противо-э. д. с. в обмотке якоря

6. Суммарные потери в движении

7. Потери в обмотках якоря и возбуждения

Пример. 10. Четырехполюсный двигатель с параллельным возбуждением (рис. 90) присоединен к сети с Uном=110 В и потребляет ток I=157 А. На якоре находится обмотка с сопротивлением Rа=0,0427 Ом и числом проводников N=360, образующих четыре параллельных ветви (а=2). Сопротивление обмотки возбуждения Rв=21,8 Ом. Магнитный поток полюса Ф= 0,008 Вб. Определить: 1) токи в обмотках возбуждения Iв и якоря Iа; 2) противо-Э.Д.С. Е. 3) электромагнитный момент Мэм; 4) электромагнитную мощность Рэм; 5) частоту вращения якоря п; 6) потери мощности в обмотках якоря Ра и возбуждения Рв.
Решение. 1. Токи в обмотках возбуждения и якоря

2. Противо-Э.Д.С. в обмотке якоря

. 
4. Электромагнитная мощность

Зная Рэм, можно найти электромагнитный момент по формуле

что и было получено выше. Здесь частота вращения якоря

5. Потери мощности в обмотках якоря и возбуждения:


Рис. 4
Пример 11. Электродвигатель постоянного тока с последовательным возбуждением (рис. 91) присоединен к сети с напряжением Uном=110 В и вращается с частотой п = 1500 об/мин. Двигатель развивает полезный момент (на валу) М =120 Н·м. К.П.Д. двигателя:  дв==0,84.
дв==0,84.
Суммарное сопротивление обмоток якоря и возбуждения Rа+Rс= 0,02 Ом.
Определить: 1) полезную мощность Р2; 2) потребляемую мощность Р1; 3) потребляемый из сети ток I; 4) сопротивление пусковоого реостата, при котором пусковой ток ограничивается до 2,5I; 5) противо-Э.Д.С. в обмотке якоря.
Решение. 1. Полезную мощность двигателя определяем из формулы полезного момента:

2. Мощность, потребляемая из сети:

3. Ток, потребляемый из сети:

4. Необходимое сопротивление пускового реостата

5. Противо-Э.Д.С. в обмотке якоря

Методические указания к выполнению задачи 28
Эта задача относится к теме «Электропривод и аппаратура управления». Предварительно следует ознакомиться с материалом, изложенным в учебнике па с. 284-286, 291-294, 295- 300, а также с методическими указаниями, приведенными ниже. Составляемые схемы должны быть начерчены в новых обозначениях, указанных в приложении.
В схемах релейно-контакторного управления следует различать
силовые цепи, питающие электродвигатели, и цепи управления, питающиеся либо непосредственно от сети, либо через понижающий трансформатор в целях безопасности.
Существуют два принципиально различных способа начертания
схем автоматизированного электропривода — свернутые схемы и развернутые. В свернутых схемах все аппараты и узлы, входящие в схему,
изображают так, как они фактически расположены относительно друг
друга. На базе этих схем составляют монтажные схемы. В развернутых
схемах элементы аппаратов и узлов расположены по принципу принадлежности их к тем или иным отдельным цепям. Соединения отдельных
элементов выполняют так, чтобы была достигнута максимальная наглядность при чтении схем, а число пересечений было минимальным. В развернутых схемах отдельные элементы одного и того же аппарата могут
входить в разные цепи схемы. Например, контакты тепловых реле
входят в цепи управления, а нагревательные элементы — в силовые цепи.
Аппаратами и узлами схем релейно-контакторного управления
являются: реле, контакторы, усилители, датчики, сигнальные устройства, путевые и конечные выключатели. Не следует смешивать датчик с
реле. Датчик непосредственно воспринимает воздействие физической
величины (напряжения, давления, температуры) и преобразует это
воздействие в сигналы, вызывающие работу реле. Датчиками могут
быть термопары, фотосопротивления, термисторы и др. Сигналы, вырабатываемые датчиком, бывают оптические, пневматические, механические и, наконец, электрические. Последние широко применяются в автоматике.
Реле отличается от датчика тем, что срабатывает при строго определенном значении входной физической величины и замыкает либо
размыкает непосредственно или косвенно ту или иную цепь. Реле бывают
тепловые, механические, пневматические и электрические; последние
срабатывают от воздействия электрических величин. Реле маркируют
двумя буквами: первая буква Р означает реле, а вторая показывает его
назначение или тип. Например, РМ—реле тока, PH — реле напряжения, РР — мощности, РУ — указательное, РТ — тепловое и т. д.
Основными принципами автоматизации управления электроприводами являются: а) управление в функции времени, т. е. выполнение
последующей операции через определенное время после предыдущей;
6) в функции скорости; в) в функции тока в обмотках двигателя; г)
в функции пройденного пути.
В схемах управления в функции времени применяют различные
реле времени: а) механические, например маятниковые, действующие
независимо от значения тока в обмотках двигателя. Срабатывание таких
реле происходит либо от механического воздействия на них при перемещении якоря контактора (пристроенные), либо при питании обмотки
собственного электромагнита; б) электромагнитные, которые по ряду
причин требуют в цепи управления постоянного значения тока.
Контакторы являются электромагнитными аппаратами для дистанционного включения и отключения электродвигателей и маркируются
буквами KЛ. При наличии в схеме нескольких контакторов, выполняющих различные операции, слева к буквенному обозначению КЛ приписывают порядковый помер. Катушка контактора может иметь один, два, три и более контактов, причем некоторые из них находятся в силовых цепях, другие — в цепях управления. Каждый контакт получает то
же буквенно-цифровое обозначение, что и его катушка. Все контакты изображают на схемах в так называемом нормальном положении, соответствующем отсутствию тока в обмотке или отсутствию механического воздействия на контакт.
При необходимости пуска и останова двигателя из нескольких мест пусковые кнопки включают параллельно, а кнопки останова последовательно. Сигнальные лампы могут включаться на зажигание или погасание. Такие лампы обозначают на схемах буквами ЛС.
Для составления и чтения развернутых схем релейно-контакторного управления следует усвоить общий принцип построения их и принятую маркировку. Все элементы соответствующих аппаратов и узлов, входящих в цепи управления, должны обозначаться так же, как соответствующие аппараты или узлы силовых цепей. Если в силовой цепи, имеется несколько совершенно одинаковых аппаратов, выполняющих одинаковые функции, то после буквенного обозначения справа проставляют порядковый номер аппарата. Например, тепловые реле, выполняющие одинаковые функции, но включенные в различные фазы, обозначают так: PT1, РТ2.
Простейшие типовые схемы релейно-контакторного управления электродвигателями
 Рис. 5 Рис. 5 |
I. Схема нереверсивного управления трехфазным асинхронным электродвигателем с короткозамкнутым ротором приведена на рис. 92.
При включении кнопки КнП («Пуск») катушка магнитного пускателя
КЛ получает питание по це
пи: фаза С, замкнутая кноп-
ка КнС («Стоп»), кнопка
КнП, замкнутый контакт
РТ1, на который воздейст-
вуют оба тепловых реле РТ1,
катушка КЛ, пулевой про-
вод. Таким образом, маг-
нитный пускатель оказыва-
ется включенным на фазное
напряжение 220 В, замкнут-
ая его контакты КЛ в си-
ловой цепи и двигатель М
получит питание. Одновременно замыкается блок-контакт КЛ, шунтирующий кнопку КнП, которая может быть отпущена. Останов двигателя осуществляется кнопкой КнС. При перегрузках срабатывают тепловые
реле, размыкают свой контакт РТ1 в цепи катушки КЛ и магнитный
пускатель отключается. Для сигнализаций работы двигателя предусмотрена лампа ЛС, которая включается блок-контактом КЛ. Для защиты сети от токов короткого замыкания установлен автоматический выключатель ВА.
II. Схема управления реверсивным асинхронным двигателем показана на рисунке 93.
Пусковые кнопки КнС3 «Вперед» и КнС2 «Назад» имеют по две пары контактов. Это предусмотрено для возможности блокирования, предотвращающего одновременное включение обоих контакторов при включении сразу двух кнопок — «Вперед» и «Назад». Такое включение вызвало бы короткое замыкание фаз А и С силовой цепи.
При включении кнопки КнСЗ катушка контактора КВ получает
питание по цепи: фаза С, кнопка КнС1, замкнутый верхний контакт,
кнопки КнС2, замыкаемый нижний контакт кнопки КнСЗ, катушка КВ
замкнутые контакты тепловых реле РТ2 и РТ1, нулевой провод. Контактор КВ сработает и замкнет силовые контакты КВ в силовой цепи,
 |
Рис. 6
и двигатель включится. При срабатывании контактора одновременно
замыкается блок-контакт КВ, что позволяет отпустить кнопку КнС.
При включении кнопки КнС2 питание па двигатель поступает через
контакты КН контактора КН («Назад»), вследствие чего произойдет
переключение двух фаз, питающих обмотки статора. При одновременном
включении кнопок КнС2 и КнСЗ одна из цепей обмоток контакторов
разомкнется и предотвратит короткое замыкание между фазами А и С.
III. Управление пуском нереверсивного трехфазного асинхронного
двигателя с фазным ротором в функции времени. В качестве реле времени использованы маятниковые реле времени, механически связанные
с валом контактора (пристроенные реле). Схема содержит (рис. 94):
линейный контактор КЛ; три вспомогательных контактора КУ1 КУ2,
КУЗ, контакты которых замыкают ступени сопротивлений R1, R2, R3;
три маятниковых реле времени с контактами РВ1, РВ2, РВЗ, замыкающимися с выдержками времени; два реле максимального тока РМ1, РМ2
(взамен тепловых реле); кнопки пуска КнП и останова КнС.
При включении пусковой кнопки КнП ток из фазы В поступает через
предохранитель Пр, замкнутые контакты кнопки КнС, катушку линейного контактора КЛ, контакты реле максимального тока РМ1, РМ2, предохранитель Пр к фазе С.
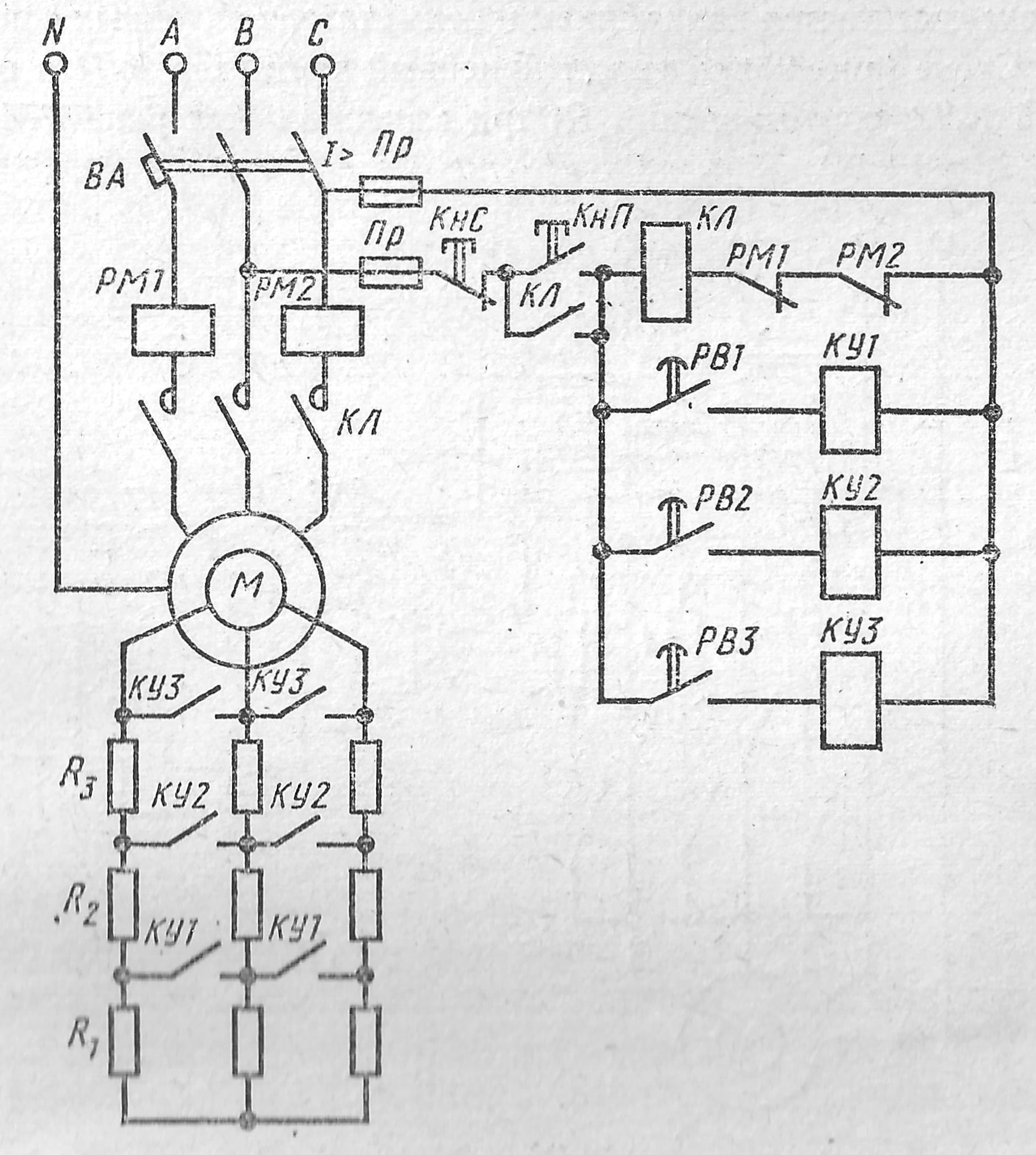 |
Рис. 7
Контактор КЛ срабатывает и замыкает и замыкает главные контакты КЛ, присоединяя двигатель к сети. Пуск двигателя происходит при полностью включенных сопротивлениях пускового реостата. Замыкается блок-контакт КЛ, и пусковую кнопку можно отпустить. Перемещающийся якорь линейного контактора КЛ заводит пружину часового механизма первого маятникового реле времени с контактами РВ1, установленными на желаемое время срабатывания (1 —10с). Контакты РВ1 замыкают цепь катушки вспомогательного контактоpa КУ1, который своим контактом КУ1закорачивает первую ступень реостатаR1. Перемещающийся якорь контактора КУ1 заводит пружину механизма второго реле времени. Когда контакты РВ2 этого реле замкнутся, получит питание контактор КУ2 и своими контактами КУ2 закоротит вторую ступень реостата R2.Перемещающийся якорь контактора КУ2 заводит пружину механизма третьего маятникового реле времени. При замыкании его контактов РВЗ сработает контактор КУЗ и контактами КУЗ зашунтирует последнюю ступень реостата R3, пуск двигателя заканчивается.








