2014-01-31
2014-01-31 1026
1026Обобщенная функциональная схема системы автоматического управления
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Оценивание параметров случайных процессов.
Квантилью xp случайной величины, имеющей функции распределения F(x) =P.
Медианой называется квантиль, соответствующий значению P=0.5.
В основе принципа действия систем управления лежит взаимодействие объекта и управляющего устройства. В не автоматических системах функцию управляющего устройства берет на себя оператор. Взаимодействие оператора и объекта подчинены определенной цели, как правило, поддержанию постоянства или изменению по определенному закону параметра, характеризующего состояние объекта (рис. 1.1).
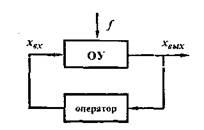
Рис. 1.1. Структура взаимодействия оператора и объекта
Так если в качестве объекта управления (ОУ) выбрана тепловая камера, то ее состояние (состояние среды в ней) характеризуется таким параметром как температура. Задача, цель оператора - поддерживать ее постоянной, например, 200 градусов. Оператор совершает ряд последовательно фиксированных во времени и в определенной последовательности операций, которые позволяют осуществить цель управления. Эти операции необходимы, а их набор представляет собой то минимальное количество функций управления, без которых процесс управления невозможен. Можно выделить следующий набор элементарных операций управления:
1. Измерение, контроль, фиксирование значения выходного параметра объекта, характеризующего его состояние (температура, давление, масса, производительность и т.д.) (ФИ);
2. Сравнение текущего значения параметра с заданным, определяющим необходимое выбранное состояние объекта (ФС);
3. Получение и оценка
сигнала ошибки, рассогласования ∆ между текущим и заданным значением управляемого параметра (ФО);
4. Выбор направления воздействия на входные параметры объекта, изменяющие режим его функционирования с тем, чтобы вернуть выходной параметр объектак заданному состоянию, а ошибку рассогласования сделать равной нулю.
Необходимо обратить внимание на естественность выбора такого набора операций управления, если проанализировать наши ежедневные действия в роли оператора по достижению элементарных целей. Например, операция поддержания постоянства температуры ряда бытовых нагревательных приборов реализуются практически интуитивно, автоматически на уровне подсознания. Это операции определения текущего значения температуры, сравнения его с необходимой, то есть заданной t ', определения отклонения между ними с учетом знака и соответственно с этим увеличение или уменьшение расхода энергии, подаваемой в объект.
Стандартный набор операций по управлению лежит в основе идеологии и методов проектирования систем автоматического управления (САУ). Очевидно, для того, чтобы перейти от неавтоматической к автоматической системе управления, необходимо стандартный набор операций, функций управления реализовать с помощью технических устройств. Таким образом, любая система автоматического регулирования строится по универсальному принципу, включая в себя, как правило, стандартный набор функциональных элементов.
Функциональная схема САУ дана на (рис. 1.2). Она фиксирует
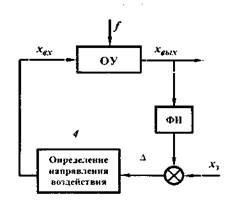 4 главные функции процесса управления. Подразумевается, что каждую из этих функций можно реализовать с помощью технических устройств.
4 главные функции процесса управления. Подразумевается, что каждую из этих функций можно реализовать с помощью технических устройств.
Рис. 1.2. Функциональная схема САУ
Так функция измерения и контроля текущего значения выходного параметра объекта реализуется стандартным набором датчиков, функция сравнения текущего и заданного значений управляемого параметра может быть, например, реализована с помощью электронного усилителя с прямым и инверсным входами. На выходе усилителя получается разностный сигнал ошибки.
Наиболее сложная для реализации функция 4, которая в свою очередь распадается на ряд еще более элементарных функций: усиления сигнала ошибки (ФУ), реализации силового воздействия по изменению входной величины объекта (ФСБ), изменения входной величины (ФВВ). Функция 4 выполняется набором технических устройств: усилитель (У), исполнительный механизм (ИМ), регулирующий орган (РО) (рис. 1.3).
Выбор знака ошибки, сигнала рассогласования, связан с противофазным изменением управляемой и управляющей величин, т.е. если Ху увеличивается, то управляющая Хвх величина должна пропорционально уменьшиться и наоборот. Так, если необходимо стабилизировать температуру t° в тепловом объекте, например в нагревательной печи, то алгоритм управления очевиден: если V больше заданной £з, то расход топлива Q надо уменьшать и наоборот.
В технической системе управления автоматизм выполнения этого условия обеспечивается следующим образом. Если ошибку ∆ выбрать как результат разности ХЗ и Xвых, то ее знак будет автоматически определять направление изменения Ху: ∆ = XЗ – Xвых.
Если XУ > XЗ, то ∆ < 0 (и Xвх надо уменьшать), а если X У< XЗ
то ∆>0 (и ХВХ надо увеличивать).
Полученный знак ∆ условен и дает только информацию о том, в каком направлении необходимо менять XВХ, При технической реализации системы надо обеспечить выполнение этого условия,
Так в приведенном примере, если текущее значение tУ больше tЗ и ∆ = tЗ —tУ < 0. то подключение силового механизма, например электродвигателя к усилителю сигнала ошибки ∆, должно обеспечить
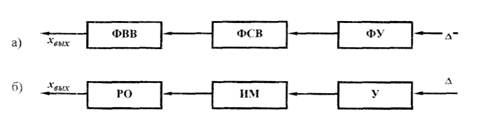
Рис. 1.3. Функциональная схема реализаций четвертой элементарной функции управления
такое перемещение регулирующего органа при котором расход топлива Q уменьшается и наоборот, если tY меньше t3, то ∆ > 0 и двигатель должен изменить направление вращения в сторону увеличения Q.
В системе действует отрицательная обратная связь. Ошибка ∆ является движущим сигналом системы. Ее возникновение приводит в действие все элементы системы, заставляя изменяться управляемую величину до тех пор пока она не сравняется с заданной. Появление ошибки ∆ приводит в процессе управления к ее самокомпенсации.
При построении САУ необходимо отталкиваться от понятия процесса, происходящего в объекте управления (техническое устройство или физическая среда, в которых происходит процесс подлежащий управлению). Процесс, как правило, связан с преобразованием потока энергии или материального потока в силовое воздействие, расход, температуру и т.д.
Существует основная характеристика объекта, позволяющая его оценивать и называемая управляемым параметром XВЫХ процесса, его состояние можно менять с помощью параметра на входе объекта, который называется управляющим XВХ.. Существуют и другие входные параметры, изменяющие состояние процесса. Но, если не ставится цель изменить состояние объекта с их помощью, то называются возмущающими воздействиями f.
Состояние объекта может характеризоваться целой совокупностью входных и выходных переменных. Так в дизеле (тепловой двигатель) (ТД) процесс, подлежащий управлению, сводится к преобразованию потока энергии от сгорающего топлива в физические величины иного рода (рис. 1.4).
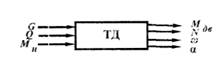
Рис. 1.4. Входные и выходные
величины теплового двигателя
 Причем в качестве набора выходных параметров можно рассматривать: Мдк - движущий момент, N - мощность на валу двигателя, со - угловые обороты двигателя, а - угол поворота вала ТД, а в качестве входных переменных - G - расход топлива, q - изменение октанового числа топлива, Мn - момент нагрузки.
Причем в качестве набора выходных параметров можно рассматривать: Мдк - движущий момент, N - мощность на валу двигателя, со - угловые обороты двигателя, а - угол поворота вала ТД, а в качестве входных переменных - G - расход топлива, q - изменение октанового числа топлива, Мn - момент нагрузки.
Однако, как правило, процесс в объекте может быть охарактеризован достаточно полно парой переменных на входе и выходе, связанных между собой. Выбор этой пары определяется т акже целью управления, которая может формироваться исходя из общей технологической задачи, выполняемой системой управления.
Выходные величины есть реакция на изменение входных. Не всегда состояние объекта может быть охарактеризовано интересующим нас параметром. Так, при пропаривании железобетонных изделий цель управления - получение изделий определенной прочности. Однако, измерить этот параметр для всех изделий в процессе тепловой обработки практически невозможно. Поэтому выбирается косвенный параметр - температура, который взаимосвязан с прочностью. Для дизеля, если желательно поддержание момента М постоянным, можно вместо этого параметра использовать угловые обороты, стабилизация которых гарантирует постоянство мощности и момента. Это косвенные переменные управления.
Таким образом, основу принципа действия САУ составляют два важнейших понятия: обобщенная функциональная структура с обязательным минимально необходимым набором элементарных функций и отрицательная обратная связь, обеспечивающая самокомпенсацию ошибки управления.
Техническая структура системы в виде принципиальной схемы отображает ее функциональную структуру, реализуя ее отдельные функции управления в виде физических элементов.