 2014-01-31
2014-01-31 1987
1987Как уже отмечалось основной причиной отклонения регулируемой величины y(t) от задающего воздействия g(t)являются возмущение. Идея этого принципа заключается в компенсации влияния возмущения путем его измерения и управления объектом регулирования с помощью измеренного значения. Для технической реализации в состав САР должны входить устройства позволяющие измерить возмущающие воздействия и устройства предназначенные для создания регулирующего воздействия на объект регулирования.
1 чувствительные элементы ЧЭ (датчики).
2 Исполнительные элементы ИЭ.
Исполнительный элемент представляет собой мощное механическое, электромеханическое, пневматическое, гидравлическое устройство. Между ЧЭ и ИЭ могут быть включены промежуточные элементы ПЭ, усилитель мощности, преобразователи сигнала, и др.
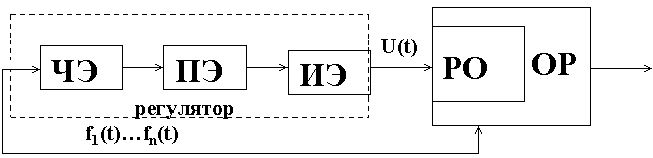
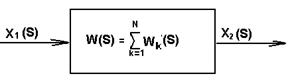
Общая система САР реализующая принцип регулирования по возмущению представлена на следующем рисунке:
Такая схема называется функциональной схемой САР. Она показывает, из каких элементов состоит система регулирования и как они соединены. Под элементом подразумевается конструктивная обособленная часть САР выполняющая определенные самостоятельные задачи. Такая система обеспечивает независимость (инвариантность) регулируемой величины y(t) от возмущающего воздействия f1(t).
Основные недостатки САР работающей по возмущению:
1. инвариантность обеспечивается лишь по отношению к измеряемому возмущению f1(t). Наличие неконтролируемых возмущений f2(t) и т.д. fn(t) приводит к тому что регулируемая величина заметно отличается от требуемого закона изменения g(t).то есть условие (1) не выполняется.
2. инвариантность по отношению к изменяемому возмущению обеспечивается только при условии строгого соответствия параметров регулятора и объекта регулирования U и x расчетным значениям.
Достоинство таких систем - простота, но в силу указанных недостатков системы этого типа для решения задач регулирования самостоятельно не применяются. Обычно они используются в качестве составной части более сложных комбинированных систем управления. В более простых, чем САР, системах этот принцип широко распространен (например, автоматическая сигнализация).
3. Принцип регулирования по отклонению
(по ошибке).
Основная задача регулирования заключается в выполнении равенства y(t)=g(t). Чем точнее оно выполняется, тем выше качество САРа. Поэтому естественно оценивать САР ошибкой x(t)=g(t)-y(t).
Для идеальной САР эта ошибка равняется нулю. Для реальных она отлична от нуля и ставиться вопрос об уменьшении ее до допустимых пределов. Идея лежащая в основе этого принципа заключается в измерении ошибки x(t), в зависимости от ее знака и величины, формируется регулирующее воздействие, обеспечивающее изменение y(t), в сторону (в зависимости от знака) уменьшения ошибки. Таким образом, обеспечивается изменение регулируемой величины y(t) по требоваемому закону g(t). При x(t)больше нуля регулирующее воздействие должно увеличивать y(t), а при x(t) меньше нуля уменьшать.
При x(t)=0 y(t)=g(t), и регулирующий орган должен оставаться неподвижным. В общем случае для определения ошибки x(t) используются три элемента:
ЗЭ - задающий элемент.
ЧЭ - чувствительный элемент.
СЭ - сравнивающий элемент.
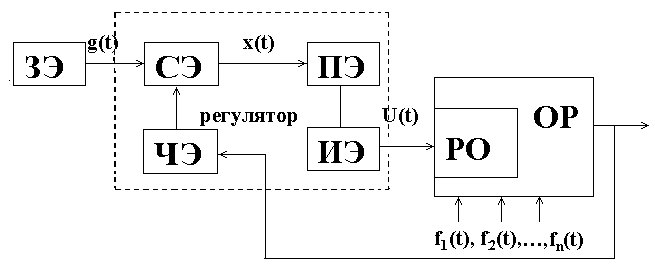
ЗЭ служит для формирования g(t), чувствительный элемент служит для измерения регулируемой величины y(t). СЭ служит для выделения ошибки x(t). Тогда функциональная схема САР, реализующая принцип регулирования по ошибки имеет следующий вид:
Промежуточный элемент может включать в себя: преобразователь импульсных сигналов в непрерывные, усилитель,, корректирующее устройство. В простейшем случае ИЭ, ПЭ могут отсутствовать. Основным преимуществом САР работающей по этому принципу перед рассмотренной ранее, является способность выполнять задачу регулирования при любом количестве возмущаемых воздействий f1(t), f2(t), …,fn(t). Вторым преимуществом САР является отсутствие жестких требований к стабильности характеристик регулятора и объекта регулирования.
Однако это не относится к ЧЭ, СЭ, ЗЭ так как они принимают участия в выявлении ошибки x(t). К стабильности этих характеристик предъявляются жесткие требования так как точности работы САР обуславливается точностью с которой измеряется ошибка.
Таким образом, САР работающая по ошибке лишена основных недостатков САР работающих по возмущению. Поэтому принцип регулирования по ошибке является основным при построении регулятора. Преимущество этих систем обусловлено тем, что они являются системами с обратной связью, причем связь отрицательна, так как g(t)-y(t).
Однако эти системы также не лишены недостатков. Такие системы имеют склонность к колебанием. Поэтому расчет их значительно сложнее чем расчет систем с регулированием по возмущению.
Лишены указанных недостатков для систем двух типов, комбинированные системы, в которых используется оба принципа регулирования.
Классификация САР.
Многообразие САР повлекло за собой разработку различных направлений для их классификаций.
1 Классификация по принципу действия. По этой классификации все САР могут быть разбиты на три группы:
1.1 системы работающие по разомкнутому циклу (принцип регулирования по возмущению)
1.2 системы работающие по замкнутому циклу (система регулирования по отклонению).
Так как в дальнейшем будут рассмотрены системы второй группы, то и направление классификации приведем только для них.
Классификация в зависимости от требуемого закона регулируемой величины по этому принципу все САР делят:
1 системы стабилизации
2 системы программного регулированием
3 следящие системы
1 Системы стабилизации предназначены для поддержания постоянного значения регулируемой величины y(t). В этих системах g(t)=g0=const. Примерами таких систем могут быть стабилизаторы напряжения, вращения, частоты, и т. д..
2 Системы программного регулирования предназначены для изменения регулируемой величины по известному закону в функциях времени или какой-либо другой величины. В таких системах задающее значение представляет собой известную функцию времени g(t)=g0(t) или какой-либо другой величины g(z)=g0(z).
g(t) - временные программы
g(z) - параметрические программы.
Различные манипуляторы.
2 Следящие системы предназначены для изменения регулируемой величины y(t) по закону, который заранее не известен. В таких случаях задающее воздействие g(t) случайная функция.
Классификация по характеру внутридинамических процессов.
Основным принципом деления САР является следующее.
1 непрерывность или дискретность динамических процессов по времени.
2 линейность или нелинейность уравнений описывающих динамику процессов регулирования.
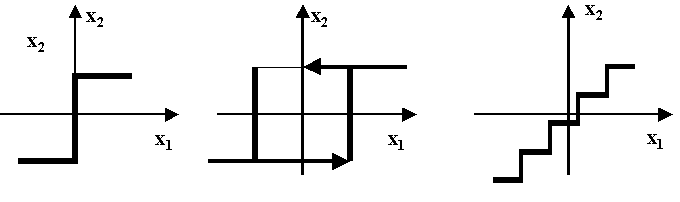
По первому принципу САР делится на системы непрерывного действия, дискретного действия (импульсные и цифровые), релейные системы. По второму признаку автоматические системы кроме релейных делятся на линейные и нелинейные. Релейные системы относятся к категории нелинейных.
 |  | ||
Система непрерывного действия называется такая система, в каждом из элементов которой непрерывному изменению входной влечены x1, соответствует непрерывное изменение выходной x2.
Система дискретного действия называется такая система, вкоторой хотя бы в одном элементе при непрерывном изменении входной величины, выходная имеет вид импульса.
Система релейного действия называется такая система, в которой хотя бы в одном элементе при непрерывном изменении входной величины выходная величина изменяется скачком.
Линейной системой называется такая система, динамика всех элементов которой описывается линейными уравнениями; алгебраическими или дифференциальными.
Основные задачи теории автоматического регулирования.
Как и любые технические программы САР должны отвечать целому ряду требований общетехнического характера: надежность, минимальная стоимость, заданные габариты и вес. Но кроме этих требований к САР предъявляется и ряд других связанных со спецификой таких систем. Самой важной из них является требование по точности регулирования. Оно регламентирует ошибку x(t). известно что такие и всякие динамические системы САР может работать в двух режимах. Установившемся (статическом), неустановившемся (переходным). Таким образом ошибка x(t)=xy(t)+xn(t) где xy(t) и xn(t) ошибки в установившемся и переходном режиме. Эта формула показывает что, требования по точности САР могут быть разбиты на требования по точности в установившемся режиме, требования по точности в переходном режиме(ограничение на xn).
Внешние воздействия всегда вызывает в САР некоторый переходный процесс. Если этот процесс затухает, то по его окончание система переходит в установившееся состояние. В связи с этим первой задачей теории автоматического регулирования (ТАР) является проблема точности работы САР в установившемся режиме. Но решение одной этой задачи недостаточно. Для удовлетворительной работы САР необходимо чтобы возникшее отклонение y(t)от задающего воздействия g(t) с течением времени стремилось к нулю. В связи с этим возникает необходимость решения второй задачи ТАР - исследование САР на устойчивость.
Выполнение требований по устойчивости гарантирует лишь факт затухания переходных процессов с течением времени. Время затухания и формы переходных процессов могут быть любыми. Поэтому третьей задачей ТАР является обеспечивание требуемого качества работы САР.
Между этими задачами существует связь. Их нельзя решать отдельно. Во многих случаях мероприятия, направленные на повышение точности работы САР, в установившемся режиме приводят к резкому ухудшению быстродействия САР и наоборот.
Решение этих задач лежит в основе методов анализа и синтеза САР. Под анализом понимается исследование готовых САР, с целью определения ее свойств и путей их улучшения. Под синтезом понимается проектирование САР, удовлетворяющей поставленным требованиям.
Математическое описание систем автоматического управления и регулирования.
Элементы и динамические звенья САУ.
Известно, что любая система АР или САУ может рассматриваться в виде совокупностей элементов, соответствующим образом связанных между собой.
Такой подход позволяет ввести понятия функциональной схемы САР, что приносит пользу при рассмотрении принципов действия автоматических систем.
Для математического описания работы автоматической системы удобно разбивать их не на элементы, а на динамические звенья или просто звенья.
Динамическим звеном называется часть системы управления, описываемая дифференциально или иным уравнением определенного вида. Звено в отличии от элемента, не должно обязательно быть законченным конструктивно. Звено может быть отдельной частью элемента автоматически или объекта регулирования, в отдельных случаях звенья могут вообще не иметь физического смысла.
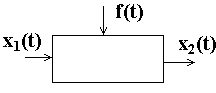 |
Чтобы охарактеризовать состояние звена выбирают одну координату на входе и одну координату на выходе. Называют их соответственно входной x1(t) и выходной x2(t) величинами звена. Условное обозначение динамического звена следующее:
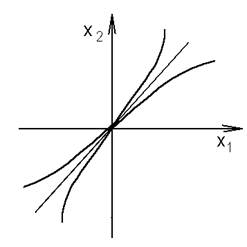
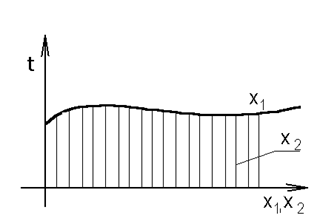
Зависимость x2(x1) в установившемся режиме называется статической характеристикой звена. Она обычно изображается графически в плоскости координат x1 и x2 и получается экспериментальным или расчетным путем.
В случае если x2 зависит также и от f, то получается семейство статических характеристик. Эти характеристики полностью описывают поведение звена в установившемся режиме. Для изучения поведения звена в переходном режиме, возникает необходимость нахождения решения дифференциального уравнения описывающего работу звена. Для звеньев непрерывного действия в общем, виде такое уравнение следующее:
F (x2(n), x2(n-1), …, x2, x2, x1(m),x1(m-1), …,x1,x1,f(g),f(g-1),..,f,f)=0 (1)
Здесь n,m,g - натуральные числа, определяющие наивысший порядок производной от x2, x1, f.
F - функции от n+m+g+3 аргумент.
На практике обычно n>m; n>g поэтому число n называется порядком дифференциального уравнения при n=1 дифференциальное уравнение 1 имеет вид:
F (x2,x2,x1,f) = 0 (2)
при n=2
F (x2,x2,x2,x1,x,f,f,) =0 (3)
Неизвестной в (1) является выходная величина x2. Для решения уравнения (1) должны быть заданы величины x1 и fn как функции времени и начальные условия.
Положив в (1) x2=const, x1=const, f=const можно получить статическую характеристику звена.
F (0, 0, …,0,x2,00, …,0,x1,00, …,0,f)=0
меняя x1,x2 можно получить семейство характеристик.
Линеаризация нелинейных уравнений динамических звеньев.
В случае когда (1) представляет собой нелинейную функцию своих аргументов динамика работы звено а описывается нелинейным дифференциальным уравнением, а само звено называется нелинейным звеном.
Исследование нелинейных дифференциальных уравнений существенно сложнее чем линейных, поэтому всегда когда это возможно стремиться линеаризовать нелинейное дифференциальное уравнение, то есть, найти такое линейное дифференциальное уравнение решение которого достаточно близко к нелинейному. Так как большинство элементов САР являются нелинейными, то задача линеаризации имеет широкое распространение.
Простейшей способ линеаризации основан на простейшем разложении функции в ряд Тейлора, с последующим отбрасыванием нелинейных членов разложения.
Рассмотрим этот способ применительно к уравнению (2), имеющему I порядок. Все изложенное будет справедливо и для уравнений более высокого порядка.
Линеаризация производиться относительно некоторого заранее выбранного режима работы звена. Чаше всего выбирается установившийся режим. Он характеризуется постоянством всех координат. Для (2) уравнение исходного режима можно представить следующим образом: x1=x10, x2=x20, f= f0, x2=0
где x10, x20, f0 - постоянные величины, связанные между собой соотношением: F (0,x20,x0,f0)=0
Выбрав исходный режим, далее, для линеаризации поступают следующим образом.
1 Представляют все входящие в рассмотренные координаты в виде:
x1=x01+∆x1, x2=x02+∆x2, f=f0+∆f, x2=∆x2. (4)
В системе (4) ∆x1, ∆x2, ∆f, ∆x2 - отклонение соответствующих координат от их значений, принятых за исходные при линеаризации.
Соотношение (4) позволяет вместо полных значений координат x1, x2, f, x2, оперировать их отклонениями (превращениями) ∆x1, ∆x2, ∆f, ∆x2.
2 Левую часть уравнения (2) разлагают в ряд Тейлора относительно точки с координатами (0,x02,x01,f) всоответствующей исходному режиму. В результате (2) переписывается в виде:
F(0, x02, x01, f0)+  + Q(∆x2, ∆x2, ∆x1,∆f)=0
+ Q(∆x2, ∆x2, ∆x1,∆f)=0
Здесь  0 - частные производные от функции F(x2,x2,x1,f) по
0 - частные производные от функции F(x2,x2,x1,f) по
соответствующей переменной, в которой после определения подставлены значения x1=x0; x2=x20; f=f0; x2=0.
В итоге получаются некоторые числа. Символом Q - обозначим остаточный член разложения содержащий вторую или более высокие степени разложения (∆x1, ∆x2, ∆x2, ∆f) их произведение умноженное на соответствующие производные.m
3 Отклонением ∆x2,∆x2, ∆x1, ∆f считают малыми и на этом основании пренебрегают остаточным членом Q (∆x2, ∆x2, ∆x1, ∆f)≈0. Учитывая F (0, x20, x10, f0)=0 в уравнение (5) можно получить выражение:
=0
Это уравнение есть линейное - дифференциальное уравнение с постоянными коэффициентами, оно представляет собой результат линеаризации нелинейного уравнения (2) относительно исходного режима (x1=x10; x2=x20; f=f0;x2=0). В основе этого подхода лежит допущение о малости отклонения всех коэффициентов от исходных в этом случае допустимо разложение функции F в ряд Тейлора в окрестностях точки (0; x20; x10; f0).
Если такое разложение не возможно, например F недеференцируема по координате, то рассматриваемый метод линеаризации неприменим, звено является существенно нелинейным. Запись линейного дифференциального уравнения в виде (6), является довольно громоздкой. В автоматике обычно опускается символ приращения «D». Кроме того, принято выходную величину x2 и ее производные записывать в левой части, а все остальные члены переносить вправо. В результате выражение (6) можно представить так:


С целью сокращения выкладок при записи дифференциальных уравнений, используется условное обозначение производных и интегралов:
 -символ дифференцирования
-символ дифференцирования
С использованием этого символа дифференциальное уравнение первого порядка имеет вид  или
или  , в общем случае для дифференциального уравнения произвольного порядка можно записать:
, в общем случае для дифференциального уравнения произвольного порядка можно записать:
 (7)
(7)
В частности для уравнения второго порядка полиномы c(p), b(p) и r(p) будут иметь следующий вид:
 ,
,  ,
,  , где
, где

,для уравнения произвольного порядка символически полиномы будут иметь следующий вид:
 ,
,
 ,
,
 ,
,
В ТАУ оказывается удобным разделить все числа дифференциального уравнения на коэффициент при  . В случае его отсутствия на ненулевой коэффициент при самой младшей производной от . Так для системы первого порядка поделив на
. В случае его отсутствия на ненулевой коэффициент при самой младшей производной от . Так для системы первого порядка поделив на  получим:
получим: (*)
(*)
Т – называется постоянной времени звена и имеет размерность «секунда». Величина  и
и  , это коэффициенты передачи звена по входной величине и по возмущению соответственно.
, это коэффициенты передачи звена по входной величине и по возмущению соответственно.
Уравнение (*) называется линейным дифференциальным уравнением первого порядка (ЛДУ-1), в стандартной форме записи. Аналогичным образом к стандартной форме записи приводятся и уравнения более высших порядков. Например для дифференциального уравнения второго порядка (ЛДУ-2) стандартная форма записи имеет следующий вид:
 ,
,
 - постоянные времени звена,
- постоянные времени звена,
 - коэффициенты передачи звена.
- коэффициенты передачи звена.
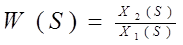
Передаточные функции линейных звеньев.
Уравнение (7) исчерпывающе характеризует динамические свойства звена, т.к. позволяет найти реакцию звена  на любые входные сигналы
на любые входные сигналы  и возмущения
и возмущения  . Однако существуют более удобные и наглядные способы описания динамических свойств линейных объектов, среди них можно отличить: передаточные функции, временные и частотные характеристики.
. Однако существуют более удобные и наглядные способы описания динамических свойств линейных объектов, среди них можно отличить: передаточные функции, временные и частотные характеристики.
Передаточной функцией звена по какому либо воздействию называется отношение преобразования Лапласа входной величины звена, к преобразованию Лапласа рассматриваемого воздействия.
При этом все другие воздействия полагаются равными нулю, принимаются нулевыми также начальные условия.
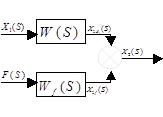
Для звена вида
 можно ввести передаточную функцию по входной величине
можно ввести передаточную функцию по входной величине  (1)
(1)
и передаточную функцию по возмущению  (2). Здесь
(2). Здесь  - комплексная переменная,
- комплексная переменная,  это преобразования Лапласа (изображения) соответствующих функций, определяющихся следующим образом:
это преобразования Лапласа (изображения) соответствующих функций, определяющихся следующим образом:
Использование формул (1) и (2) для вычисления передаточных функций не целесообразно. Они могут быть легко вычислены, если известно дифференциальное уравнение звена вида (7).
Преобразуем это уравнение по Лапласу, т.е. перейдем к изображению.
Согласно теоремы о линейности уравнение (7) в развернутом виде может быть записано в следующем виде:

По теории об изображении производных:  , имеем
, имеем

или  (3), где
(3), где 
 . Решив уравнение (3) относительно
. Решив уравнение (3) относительно  получим
получим  . Положив
. Положив  найдем передаточную функцию звена по входной величине
найдем передаточную функцию звена по входной величине  (4). При
(4). При  получим передаточную функцию по возмущающему воздействию:
получим передаточную функцию по возмущающему воздействию:  (5).
(5).
Исходя из вышеперечисленного правило для определения передаточной функции звена можно записать следующим образом:
1) составить дифференциальное уравнение в символической форме
2) разделить формально символический многочлен, стоящий в правой части перед интересующим нас воздействием на символический многочлен в левой части
3) в полученном результате символ дифференцирования  заменить на комплексную переменную
заменить на комплексную переменную 
Пример:
Для звена первого порядка, описанного символическим уравнением  , передаточная функция звена по входной величине
, передаточная функция звена по входной величине 
 . Сопоставив уравнения (4) и (5) видно, что передаточные функции какого-либо конкретного звена имеет один и тот же знаменатель.
. Сопоставив уравнения (4) и (5) видно, что передаточные функции какого-либо конкретного звена имеет один и тот же знаменатель.
Многочлен, стоящий в знаменателе называется характеристическим полиномом этого звена, а уравнение вида  характеристическим уравнением звена. Корни многочлена стоящего в числителе передаточной функции, называются нулями этой передаточной функции.
характеристическим уравнением звена. Корни многочлена стоящего в числителе передаточной функции, называются нулями этой передаточной функции.
Корни многочлена, стоящего в знаменателе передаточной функции, называются полюсами передаточной функции.
Графическое изображение звена.
Структурные схемы.

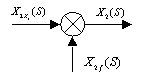
Запишем изображение выходной величины в следующем виде  (*). Представим в виде
(*). Представим в виде  ,
,  ,
,  . Последние формулы удобно изображать графически следующим образом
. Последние формулы удобно изображать графически следующим образом
Здесь выходная величина представляет собой произведение входной величины на передаточную функцию, изображенную в прямоугольнике.
Условимся результат суммирования изображать в виде перечеркнутого круга  , тогда можно записать
, тогда можно записать
 |
Этот же символ используется для обозначения разности. В этом случае сектор, соответствующий вычитаемому зачеркивается


После введенных выше графических обозначений уравнение (*) можно представить в виде:
Этот рисунок представляет собой структурную схему динамического звена.
Структурной схемой элемента автоматики или всей САУ называется схема, показывающая, из каких звеньев состоит объект и как эти звенья соединены между собой. Часто на структурных схемах записываются не изображения функции, а сами функции ( ). Это допустимо, но не следует забывать что, соотношения, лежащие в основе построения структурных схем, справедливы только для изображений(т.е. для функций от ).
). Это допустимо, но не следует забывать что, соотношения, лежащие в основе построения структурных схем, справедливы только для изображений(т.е. для функций от ).
На основании выше сказанного обобщенная структурная схема САУ может быть представлена следующим образом:
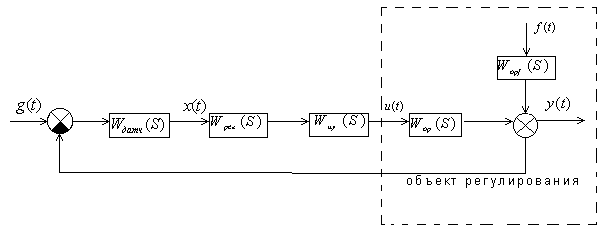
 - передаточная функция датчика
- передаточная функция датчика
 - передаточная функция регулятора
- передаточная функция регулятора
 - передаточная функция исполнительного устройства
- передаточная функция исполнительного устройства
 - передаточная функция объекта регулирования
- передаточная функция объекта регулирования
 - передаточная функция объекта регулирования по возмущению
- передаточная функция объекта регулирования по возмущению
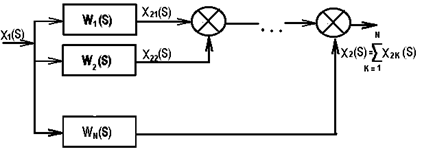
Передаточная функция основных соединений линейных звеньев.
САУ – представляет собой свойство звеньев по разному соединенных между собой. Существуют три типа соединений:
- последовательное
- параллельное
- соединения с обратной связью (встречно-параллельное)
последовательным называется такое соединение двух или более звеньев, при котором выходная величина предыдущего звена является входной величиной последующего.
графически можно представить следующим образом:
 |
Для такого соединения можно записать:

общая передаточная функция соединения будет равна:
 ;
;  (1)
(1)
 |
Из формулы (1) следует что последнее соединение звеньев можно заменить эквивалентной структурной схемой следующего вида:
Параллельное соединение называатся такое соединение 2 или более звеньев, при котором входная величина звеньев одна и тоже, а выходные величины складываются графически:
Для каждого из звеньев можно записать: 
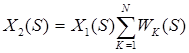
 ;
;  (2)
(2)
 |
Эквивалентная структурная схема параллельного соединения следующая:
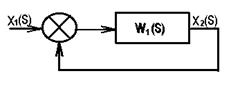
Соединение с обратной связью – называется соединение двух звеньев, при котором выходная величина одного звена подается обратно на вход этого звена через другое.
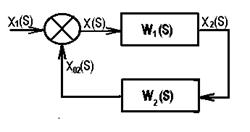 |
Графически изображается в виде:
Звено стоящее в прямой цепи называется звеном обхватываемым обратной связью. Звено, стоящее в цепи обратной связи (c  ), называется звеном обратной связи
), называется звеном обратной связи
 . Может складываться с входной величиной
. Может складываться с входной величиной  . В этом случае имеет место положительная обратная связь
. В этом случае имеет место положительная обратная связь
вычитается, то отрицательная обратная связь.
Найдем изображение связывающее изображение выходной величины с изображением входной величины
с изображением входной величины .
.  ;
;

после подставления получим:
решим последнее уравнение относительно в результате получим:

 ;
;  (3)
(3)
для соединения с отрицательной связью имеем окончательный результат:
эквивалентная структурная сема соединения с обратной связью имеет вид: (ри
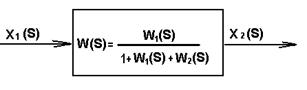 |
Важным случаем является единичная обратная связь
 |
Для такого соединения передаточная функция следующая:
Временные характеристики линейных звеньев
Временные характеристики звена называется закон изменения выходной величины  , при изменении входного по определенному закону при условии, что до приложения воздействия звено находилось в покое.
, при изменении входного по определенному закону при условии, что до приложения воздействия звено находилось в покое.
Чаще всего при получении временных характеристик, что входное воздействие изменяется по закону единичной ступенчатой функции.
либо по закону ∆-функции.
для дельта функции характерно, что площадь:
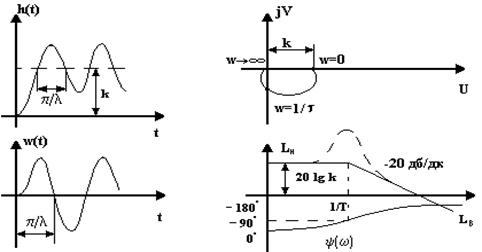
временные характеристики звена при этих законах изменений внешних воздействий получили название переходной функцией звена и функцией веса звена.
Переходной функцией звена h(t) называется реакция звена на входной сигнал X1(t)=1(t), при условии, что до приложения входного воздействия звено находилось в покое.
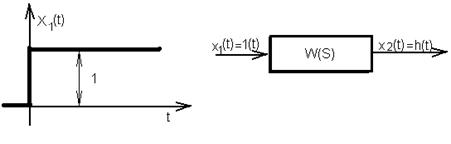 |
Переходная функция может быть определена экспериментально или вычислено теоретически. Если работа звена описывается дифференциальным уравнением следующего вида: 
то для теоретического определения h(t) необходимо найти решение уравнения в виде: при условии, что:f(t)=0; h(0)=h”(0)=…=0
при условии, что:f(t)=0; h(0)=h”(0)=…=0
Воспользовавшись преобразованием Лапласа получим изображение переходной функции  т.к. изображение
т.к. изображение  .
.
Из последней формулы следует, что переходная функция будет обратным преобразованием Лапласа от изображения

Таким образом функция представляет собой обратное преобразование Лапласа от передаточной функции деленной на S.
В общем случае передаточная функция определяется формулой
изображение переходной функции будет 
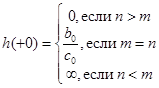
результаты вычисления передаточной функции обычно представляется в виде графика в координатах t, h(t). Начальное при  и конечное при
и конечное при  значения переходной функции можно оценить, не вычисляя саму функцию h(t), по теореме о начальном значении оригинала
значения переходной функции можно оценить, не вычисляя саму функцию h(t), по теореме о начальном значении оригинала  , подставляя последнее выражение, в выражение
, подставляя последнее выражение, в выражение  получим
получим
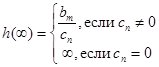
по теореме о конечном значении оригинала имеем следующее

тогда имеем
Функцией веса или импульсной переходной функцией звена  называется его реакция на входной сигнал
называется его реакция на входной сигнал  при условии, что до приложения входного воздействия звено находилось в покое.
при условии, что до приложения входного воздействия звено находилось в покое.
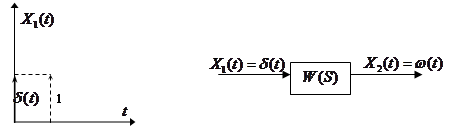 |
Функция так же может быть вычислена экспериментально или теоретически. Для экспериментального определения функции веса снимаю процесс изменения выходной величины звена при входном воздействии в виде реального импульса произвольной формы с единичной площадью. Для теоретического определения функции веса необходимо решить дифференциальное уравнение следующего вида: 
при нулевых начальных условиях:  , преобразовав последнее уравнение по Лапласу, получим:
, преобразовав последнее уравнение по Лапласу, получим: ;
; .
.
Отсюда функция веса 
Таким образом, функция веса представляет собой обратное преобразование Лапласа от передаточной функции звена. Начальное и конечное значения так же можно определить, не зная вида самой функции по соответствующим функциям: ;
; .
.
Функция веса так же строится обычно в координатах t,  (t).
(t).
Найдем связь между переходной функцией и функцией веса. По теореме об изображении производной можно записать 
Переход к оригиналам дает следующий результат: ;
; .
.
Функция веса является производной от переходной функции. В виду наличия однозначной связи между  и , в расчетах обычно используется одна из этих характеристик. Чаще всего переходная функция, так как экспериментально определить ее проще. Рассмотренные выше характеристики полностью определяют динамические свойства звена, так же как дифференциальные уравнения и передаточные функции. В частности с помощью них можно найти реакцию звена на входное воздействие произвольной формы.
и , в расчетах обычно используется одна из этих характеристик. Чаще всего переходная функция, так как экспериментально определить ее проще. Рассмотренные выше характеристики полностью определяют динамические свойства звена, так же как дифференциальные уравнения и передаточные функции. В частности с помощью них можно найти реакцию звена на входное воздействие произвольной формы.
 - интеграл Дюамеля.
- интеграл Дюамеля.
Преимущества временных характеристик:
- наглядность и возможность экспериментального определения.
Недостатки:
- трудоемкость вычисления характеристик для дифференциальных уравнений высокого порядка.
Частотные характеристики линейных звеньев.
В реальных системах часто входной сигнал изменяется по гармоническому закону, с заданной частотой и амплитудой. При этом ставится задача нахождения параметров колебаний на выходе при известных на входе. Решение этой задачи с помощью временных характеристик представляет определенные трудности. Частотный же метод позволяет значительно проще получить реакцию звена или системы на любой периодический сигнал. Допустим, что возмущающее воздействие отсутствует ( ), а на вход звена с передаточной функцией
), а на вход звена с передаточной функцией  поступает сигнал, изменяющийся по гармоническому закону:
поступает сигнал, изменяющийся по гармоническому закону: , где - круговая частота.
, где - круговая частота.
На выходе линейного звена после окончания переходного процесса так же будет периодический сигнал той же частоты, но с другой амплитудой и фазой: ;
; (1);
(1); (2).
(2).
Формулы (1) и (2) показывают, что для определения реакции звена на гармоническое воздействие достаточно знать комплексную функцию  . Она получается заменой в передаточной функции комплексной переменной на
. Она получается заменой в передаточной функции комплексной переменной на  , причем
, причем  .
.
Функция называется частотной передаточной функцией и в общем виде может быть представлена так:  (3)
(3)
Формула (3) может быть представлена в нескольких видах:
1)  , где
, где  и
и 
2)  , где
, где  и
и 
Функция  называется амплитудно-частотной характеристикой (АЧХ) системы (звена). Функция
называется амплитудно-частотной характеристикой (АЧХ) системы (звена). Функция  называется фазо-частотной характеристикой (ФЧХ). Функции
называется фазо-частотной характеристикой (ФЧХ). Функции  и
и  называются вещественной (действительной) и мнимой частотной характеристикой системы (звена).
называются вещественной (действительной) и мнимой частотной характеристикой системы (звена).
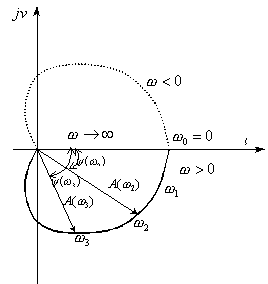
В координатах  строится амплитудно-фазовая характеристика (АФК). Для этого, для каждой фиксированной частоты
строится амплитудно-фазовая характеристика (АФК). Для этого, для каждой фиксированной частоты  ,
,  на оси абсцисс откладываем , а по оси ординат . Точки соединяют плавной линией. Полученная кривая называется годографом.
на оси абсцисс откладываем , а по оси ординат . Точки соединяют плавной линией. Полученная кривая называется годографом.
Для вычисления значений  представим (3) в виде:
представим (3) в виде:
 ,
,
где  - действительные части числителя и знаменателя,
- действительные части числителя и знаменателя,  - соответственно мнимые части.
- соответственно мнимые части.
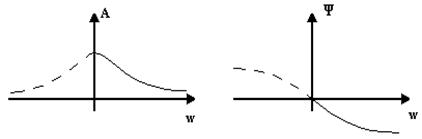
Тогда модуль будет определяться:
, а аргумент:
Для определения U(w) и V(w) умножим передаточную функцию на комплексно сопряженное знаменателю число.
 ;
; ;
; ;
;
 .
.
При практических расчетах предпочтительнее пользоваться выражениями для A(w) и Y(w),т.к. они проще и могут быть получены экспериментально.

Y(w)получается как разность фаз между выходным и входным сигналами.
Логарифмические частотные характеристики звеньев.
Частотные методы исследования САР значительно упростятся, если для построения графиков частотных характеристик использовать логарифмические шкалы. Характеристики A(w) и Y(w), построенные в логарифмическом масштабе называются соответственно логарифмическими амплитудными характеристиками (ЛАХ) или (ЛАЧХ) и логарифмической фазовой характеристикой (ЛФХ) или (ЛФЧХ).
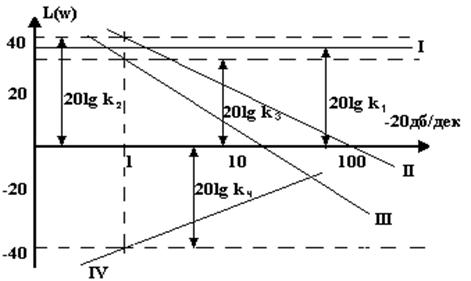
Логарифмические координаты при построении ЛАХ по оси частот - декада, по оси ординат - децибел. Усилением в децибелах называется величина:

Изменение частоты в 10 раз соответствует 1 декаде. Изменение величины А(усиление) в10 раз соответствует 20 децибелам.
При построении ЛФХ логарифмическая шкала применяется только по оси частот. По оси ординат используют натуральный масштаб (градусы или радианы). Для практических расчетов удобно при изображении ЛАХ и ЛФХ использовать один и тот же график с общей осью частот. По ординате точку -180 градусов ЛФХ совмещают с точкой 0 децибел ЛАХ. L(w),y(w)
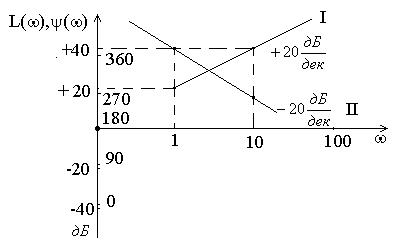
Увеличение величины А в 10 раз при увеличении частоты в 10 раз соответствует нарастанию ЛАХ на величину 20 (децибел/декад). Такому изменению будет соответствовать все прямые параллельные прямой I. Уменьшение величины А в 10 раз при увеличении частоты в 10 раз соответствует изменение ЛАХ на -20(децибел/декад).
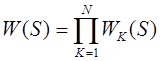
Введение логарифмических масштабов позволяет упростить построение результирующих частотных характеристик последовательно соединенных звеньев.
Для такого соединения частотная передаточная функция:
 ; т.к.
; т.к.  , а
, а  , то
, то  , или
, или  (1),
(1), 
Окончательно получим: 
Прологарифмируем (1) и (2): (3)
(3) 
(2) и (4) показывают, что результирующие частотные характеристики нельзя строить путем суммирования характеристик отдельных звеньев. Применение логарифмических шкал существенно уменьшает крутизну ЛАХ и позволяет исследовать поведение звеньев как на низких, так и на высоких частотах. При построении ЛАХ в большинстве случаев нет необходимости проводить какие-либо расчеты. Для демонстрации простоты построения ЛАХ рассмотрим ряд важных примеров:
Пример1: Существует звено имеющее АЧХ вида:  , тогда ЛАХ
, тогда ЛАХ  . ЛАХ такого вида представляет собой прямую с наклоном 1 (дец/дек), т.е. параллельно оси абсцис.
. ЛАХ такого вида представляет собой прямую с наклоном 1 (дец/дек), т.е. параллельно оси абсцис.
Пример2:  ;
;  . Такой ЛАХ соответствует прямая, проходящая через точку с координатами w=1;
. Такой ЛАХ соответствует прямая, проходящая через точку с координатами w=1;  и имеющая наклон -20(дец/дек).
и имеющая наклон -20(дец/дек).
Пример3:  ;
; 
Этой ЛАХ соответствует прямая, проходящая через точку с координатами  с наклоном -40(дб/дек). Если
с наклоном -40(дб/дек). Если  , то ей будет соответствовать прямая, проходящая через точку w=1;
, то ей будет соответствовать прямая, проходящая через точку w=1;  c наклоном -20*n(дб/дек).
c наклоном -20*n(дб/дек).
Пример4:  ;
; 
Этой ЛАХ соответствует прямая, проходящая через точку с координатами w=1;  c наклоном +20(дб/дек).
c наклоном +20(дб/дек).
Рассмотренные преимущества в построении сделали метод построения логарифмических частотных характеристик одним из основных методов анализа и синтеза линий САУ.
Типовые динамические звенья и их характеристики.
Типовыми динамическими звеньями называются звенья, описываемые дифференциальным уравнением выше 2-го порядка. Все типовые звенья можно разделить на 3 группы: позиционные, интегрирующие, дифференцирующие. Тип динамического звена, соответствующему реальному устройству зависит от допущений и выбора входных и выхлодных величин этого устройства. Одно и тоже устройство в зависимости от степени его идеализации может быть отнесено к различным типам звеньев.
Позиционные звенья.
Позиционными звеньями называют такие для которых в установившемся режиме характерна линейная зависимость между входной и выходной величинами. Эти звенья в общем виде описываются следующим уравнением:

где с(p) - многочлен, не выше 2-го порядка, k - коэффициент передачи звена.
· 1) Пропорциональное (безинерционное) звено.
Это звено, которое как в установившемся так и в переходном режиме описывается уравнением следующего типа: 
Это звено простейшее.
· 2) Апериодическое звено 1-го порядка.
Описывается дифференциальным уравнением:
где Т-постоянная времени звена; k - коэффициент передачи.
Примером такого звена может служить R-C цепь. Передаточная функция:

Временные характеристики звена найдем используя обратные преобразования Лапласса.
Передаточная функция:
Функция веса: 
Найдем частотные характеристики используя частотную передаточную функцию.
 , отсюда АЧХ звена:
, отсюда АЧХ звена: .
.
ФЧХ: 
АЧХ: 
Определим вид ЛАХ для низких и высоких частот.
Для w<<1/Т: 
Для w>>1/Т: 
 дает наклон ЛАХ "0" децибел на декаду
дает наклон ЛАХ "0" децибел на декаду
 дает наклон "-20" децибел на декаду
дает наклон "-20" децибел на декаду
Характеристики и называются низкочастотной и высокочастотной асимптотами ЛАХ. При w= 1/Т
= частота, на которой эти характеристики равны (сопрягаются), называются сопрягающей частотой.
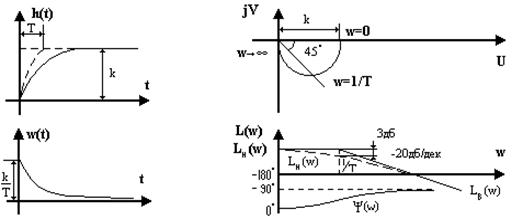
Ломанная линия вида:
называется асимптотической ЛАХ звена. Если построить реальную ЛАХ, то она будет практически совпадать с асимптотической везде кроме области сопрягающей частоты w= 1/T. Здесь различие у этих характеристик (реальной и асимптотической) достигает не более 3 децибел. Поэтому в большинстве случаев будет ограничиваться построением только асимптотических ЛАХ. Изобразим характеристики апериодического звена 1-го порядка в виде графиков:
Описывается дифференциальным уравнением следующего вида:

Передаточная функция будет иметь вид:
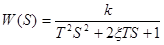
Примером таких звеньев может служить R-L-C контур; гироскоп в кардановом подвесе. x -коэффициент относительного демпфирования, 0< x <1 (затухания).
При таких значениях x корни характеристического уравнения  имеют вид:
имеют вид:
 - комплексно сопряженные корни.
- комплексно сопряженные корни.
Звено с таким корнем называется колебательным. Вещественная часть корней характеризует затухание, мнимая- частоту колебаний. Обозначим вещественную часть корня  , а мнимую:
, а мнимую:  , тогда
, тогда 
Временные характеристики колебательного звена также будем получать используя обратные преобразования Лапласса.

Частотные характеристики звена найдем используя частотную передаточную функцию:
АЧХ: 
ФЧХ: 
ЛАХ:  (*)
(*)
Построим ассимптотическую ЛАХ  наклон 0 децибел на декаду.
наклон 0 децибел на декаду.
 наклон -40дб/дк. Однако, для колебательного звена реальная ЛАХ будет существенно отличаться от асимптотической в районе сопрягающей частоты.
наклон -40дб/дк. Однако, для колебательного звена реальная ЛАХ будет существенно отличаться от асимптотической в районе сопрягающей частоты.
Проанализировав знаменатель выражения (*) можно отметить, что выражение в квадратных скобках стремится к 0 в области w=1/T, а следовательно ЛАХ на этих частотах будет возрастать. И рост ее будет тем больше, чем меньше значение коэффициента x.
Построим графики временных характеристик колебательного звена:
К этому рассматриваемому классу относится так же апериодическое звено второго порядка, которое получается путем последовательного соединения 2-х апериодических звеньев 1-го порядка и консервативное звено, получаемое из колебательного при x =0.
Интегрирующие звенья.
Интегрирующими звеньями называются такие звенья, поведение которых описывается дифференциальным уравнением вида:
здесь c(p)-полином, не выше, второй степени, удовлетворяющий условию c(0)=1.
В интегрирующих звеньях в установившемся режиме имеет место линейная зависимость между входной величиной и производной выходной величины.
· 1) Идеальное интегрирующее звено:

Пример: идеальный конденсатор. Передаточная функция такого звена:

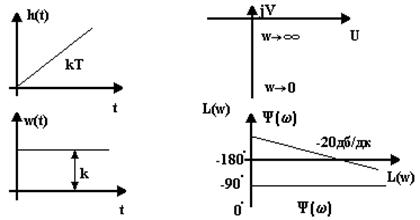
 реакция звена на входные воздействия.
реакция звена на входные воздействия.
 , тогда
, тогда
АЧХ: 
ФЧХ: 
ЛАХ: 
Построим эти характеристики в виде графиков:
К этому классу относятся интегрирующие звенья с замедлением и изодромное звено.
Интегрирующее с замедлением представляет собой последовательное соединение интегрирующего и апериодического звена 1-го порядка.
Изодромное звено - параллельное соединение идеального интегрирующего и пропорционального звеньев.
Дифференцирующими называются такие звенья, у которых в установившемся режиме выходная величина пропорциональна производной от входной.

1) Идеальное дифференцирующее звено описывается дифференциальным уравнением вида:

2) Дифференциальное звено с замедлением:
(Tp+1)
Функция Веса:
частотно-передаточная функция получена путем замены комплексной переменной S на jw:
АЧХ: 
ФЧХ:

