2014-01-31
2014-01-31 883
883СПИСОК ЛИТЕРАТУРЫ
1. Алексеенко А. Г. Основы микросхемотехники. — М.: Радио и связь, 1978.
2. Армейский Е. В., Фалк Г. Б. Электрические микромашины. — М.: Высш. шк, 1985.
3. Бабиков М.А., Косинский А. В. Элементы и устройства автоматики. — М.: Высш. шк., 1975.
4. Горошков Б. И. Элементы радиоэлектронных устройств. — М.: Радио и связь, 1988.
5. Емельянов А. И., Емельянов В. А., Калинина С. А. Практические расчеты в автоматике. — М.: Машиностроение, 1967.
6. ЗимодроА. Ф., Скибинский Г.Л. Основы автоматики. — Л.: Энергоатом-издат, 1994.
7. Квартин М. И. Электромеханические и магнитные устройства автоматики: Учебник. — М.: Высш. шк., 1989.
8. Миловзоров В. П. Электромагнитные устройства автоматики: Учебник. — М.: Высш. шк., 1983.
9. Никифоров Г. Н., Котылев Г. В. Конструкция самолетных агрегатов. — М.: Машиностроение, 1989.
10. Обухов А. О. Теория элементов автоматики. — Минск: Наука и техника, 1989.
11. Подлипенский В. С., Сабинин Ю. А., Юрчук Л. Ю. Элементы и устройства автоматики / Под ред. Ю. А. Сабинина. — СПб.: Политехника, 1995.
12. Приборостроение и средства автоматики: Справочник / Под ред. А.Н.Гаврилова. — М.: Машиностроение, 1964.
13. Таев И. С. Электрические аппараты автоматики и управления. — М.: Высш. шк., 1985.
14. ШавровА.В., Коломнец А. П. Автоматика. — М.: Колос, 1999.
15. Шило В.Л. Линейные интегральные схемы. — М.: Радио и связь, 1982.
16. Энциклопедия современной техники: Автоматизация производства и промышленная электроника / Под ред. А. И. Берг и В.А.Трапезникова. — М.: Сов. энцикл., 1998.
17. Юферов Ф. М. Электрические машины автоматических устройств. — М.: Высш. шк., 1998.
Автоматика - прикладная научная дисциплина, изучающая принципы Автоматической системой или системами автоматического регулирования называется совокупность технических устройств, выполняющих свои функции без непосредственного участия человека.
построения и методы расчета автоматических систем.
Все САУ в зависимости от назначения могут быть разбиты на два класса систем.
1. системы автоматического регулирования (САР)
2. кибернетические системы (КС)
САР - автоматически решают задачи регулирования работы тех или иных агрегатов.
КС - предназначены для решения более сложных задач, таких как самонастройка, самоорганизация, выборов наилучших режимов работы и другие. Автоматическим регулированием называется изменение какой - либо физической величины по требуемому закону без непосредственного участия человека.
Физическая величина в данном случае называется регулирующей величиной.
Технический агрегат в котором осуществляется регулирование называется объектом регулирования (ОР). Обозначим через y(t) функцию описывающую изменение регулирования величины во времени. Пусть g(t) функция задающая характер изменения регулируемой величины y(t).
Тогда основная задача автоматического регулирования сводиться к обеспечению равенства y(t)=g(t) (1) с требуемой точностью во все объекты времени заданной точностью. Функцию g(t) будем называть функцией задающей воздействия.
В реальных объектах регулирования всегда существуют причины отклоняющие регулируемую величину от заданного воздействия. Эти причины называются возмущающими воздействиями (возмущение) f1(t), f2(t).
Для борьбы с возмущениями объект регулирования обычно снабжается регулирующим органом воздействуя на который можно изменять y(t) и тем самым компенсировать влияние возмущения. Воздействие на регулирующий орган называется регулирующим воздействием и обозначается U(t).
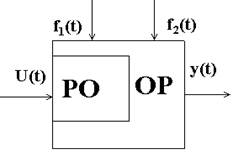 |
Все сказанное выше позволяет изобразить общую схему любого объекта регулирования в следующем виде:
Устройства автоматически решающие задачу регулирования в данном объекте называется автоматическим регулятором. Объект регулирования и автоматический регулятор образуют систему автоматического регулирования.
Любой регулятор предназначен для создания регулирующего воздействия U(t) на объект с целью изменений величины y(t) по требуемому закону g(t). Все регуляторы строиться на базе одного из двух возможных принципов регулирования.
1. по возмущению (по внешнему воздействию)
2. по отклонению (по ошибке).