 2014-01-31
2014-01-31 1007
1007Каждый функциональный элемент выполняет элементарную функцию, которая заключается в получении преобразовании и передачи информации в виде сигналов определенной физической природы. Функциональные элементы предполагают устройствами одно направленного действия, т.е. передающими сигналы в одном направлении.
Всем элементам автоматики, независимо от их назначения присущи общие параметры:
1. Статическая характеристика;
2. Динамическая характеристика;
3. Передаточный коэффициент;
4. Погрешность;
5. Порог чувствительности.
1. Под статической характеристикой элемента понимают зависимость y=f(x), т.е. зависимость между выходными (у) и входными (х) величинами в установившемся режиме, когда х и у неизменны во времени. Статическая характеристика может задаваться в виде аналитического выражения или графика. По виду статической характеристики различают элементы с линейной и нелинейной статической характеристикой.
2. Под динамической характеристикой элемента понимают зависимость выходной величины у от входной величины х в переходном, т.е. динамическом режиме, когда х и у меняются во времени. Характер динамической характеристики зависит от инерционных свойств конкретного элемента. Иногда под динамическими характеристиками понимают зависимость выходной величины у и входной величины х от времени, при переходном процессе.
3. Передаточный коэффициент элемента представляет собой отношение выходной величины у к входной величине х.
Статический коэффициент передачи:
 1.7
1.7
Динамический коэффициент передачи:
 =
= =
= 1.8
1.8
Для линейной статической характеристики при всех х и у кс=кД. Единица измерения передаточного коэффициента равна отношению единиц измерения выходной и входной величин. Очень часто на практике используют безразмерный относительный передаточный коэффициент.
 1.9
1.9
где хн, yн – нелинейные значения х и у.
Коэффициент передачи для разных элементов автоматики называют по разному: для датчиков – коэффициентом чувствительности, для измерителей – коэффициентом усиления и т.д.
4. Погрешностью называется разность между текущим и номинальным заданным значением выходной величины. Различают абсолютную и относительную погрешности, которые возникают из-за изменения внутренних свойств элемента (износ, старение) и внешних условий (изменение температуры и влажности окружающей среды, изменение напряжения питания, изменение частоты тока и т.д.)
5. Порог чувствительности – наименьшее изменение входной величины, способное вызвать появление изменения выходной величины (за счет наличия трения, люфтов, гистерезиса и т.д.).
В отдельных элементах автоматики можно рассматривать различные характеристики, которые отражают работу этих элементов, как части САУ: потребляемая мощность, входное и выходное сопротивление, и т.д.
Очень большому количеству элементов присуще самопроизвольное изменение выходной величины при постоянстве входной. Такие изменения называются: помехами, шумами, дрейфом нуля, плаванием коэффициента усиления.
§1.10. Математическое описание САУ. Режимы движения автоматических систем.
Математическое описание элементов и систем применяют в тех случаях, когда необходимо изучить систему и элементы в процессе работы, при наличии возмущающих и управляющих воздействий. Математическое описание может быть аналитическим, графическим или табличным. Для получения математического описания системы обычно составляют описание ее отдельных элементов. Совокупность всех уравнений элементов и дает уравнение САУ.
Уравнение, а также структурная схема САУ носит название математической модели системы. Такое название обусловлено тем, что при математическом описании, т.е. составлении уравнений, физических процессов всегда делают какие-либо допущения и приближения. Математическая модель одной и той же системы в зависимости от цели исследования может быть разной. Исследования начинаются с простейших моделей и усложняются в процессе решения.
Если возмущающее и управляющее воздействие в системе непрерывно изменяются, то система находится в динамическом режиме. Динамическим режимом называется такой режим, в котором основным состоянием системы является неустановившееся состояние. Неустановившееся состояние характеризуется тем, что действующее на элемент или систему воздействие вызывает в системе или элементе ряд переходных процессов. При поступлении на вход системы воздействия ее движение складывается из собственного или свободного движения и из реакции на входное воздействие, т.е. из вынужденного движения. Переходной процесс представляет собой такое собственное или свободное движение системы, которое зависит от динамических свойств элементов системы и начальных условий. Собственное движение устойчивой системы с течением времени затухает и она приходит в установившееся состояние. В установившемся состоянии обязательно все воздействия остаются неизменными.
Режим, который характеризуется установившимся процессом в элементе или системе называется статическим.
Действующая САУ, находящаяся в динамическом режиме и ее описание является основным. Статический режим в САУ представляет собою в определенной степени идеализацию, которую принимают для описания элемента или системы после окончания переходного процесса.
§1.11. Описание элементов и систем в статическом режиме. Линеаризация.
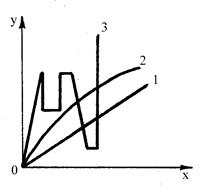 Статический режим это установившееся состояние равновесия, при постоянном воздействии. Он наступает после окончания переходного процесса. Статической характеристикой элемента или системы называется зависимость выходной величины от входной в статическом режиме. В большинстве случаев статическую характеристику изображают в виде графиков, по оси абцисс – х, а по оси ординат – у. Статические характеристики могут иметь следующий вид:
Статический режим это установившееся состояние равновесия, при постоянном воздействии. Он наступает после окончания переходного процесса. Статической характеристикой элемента или системы называется зависимость выходной величины от входной в статическом режиме. В большинстве случаев статическую характеристику изображают в виде графиков, по оси абцисс – х, а по оси ординат – у. Статические характеристики могут иметь следующий вид:
1. линейный
2. нелинейный
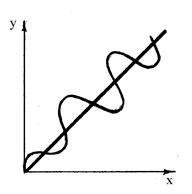
3. существенно нелинейный
В реальных случаях статическая характеристика элементов и систем являются нелинейными. В инженерной практике нелинейные характеристики заменяют приближенными линейными. Процесс замены нелинейной характеристики ее линейным приближением называют ее линеаризации.
Наиболее простая линеаризация – это метод осреднения. Он используется в том случае, когда дана достаточно гладкая нелинейная характеристика и ее можно просто заменить линейным выражением или линейным графиком.
Метод малых отклонений. Он основан на замене нелинейной характеристики у=f(x) в окрестности точки А(х0,у0) прямой, касательной к данной точке.
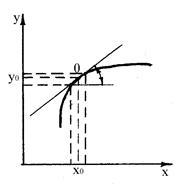
Аналитическая линеаризация нелинейной зависимости в общем случае выполняется с использованием разложения функции у=f(x) в ряд Тейлора для точки равновесного состояния системы. Пусть точка А(х0,у0) является точкой равновесного состояния системы, тогда:
 1.10
1.10
Затем производится исключения из ряда членов высших порядков малости, т.е. содержащих отклонение величины Dх в степени выше первой:
 1.11
1.11
 1.12
1.12
 1.13
1.13
Выражение (1.13) представляет собой линеаризованную функцию у(х), представленную в отклонениях от равновесного состояния. Производная этой функции в точке равновесного состояния равна тангенсу угла наклона a линеаризованного участка в окрестностях этой точки.
Метод линеаризации применим в случае, если нелинейная функция у=f(x) в окрестности исследуемой точки является непрерывным, а к кривой, изображающую функцию можно провести касательную.
§1.12. Описание элементов и систем в динамическом режиме. Определение элементарного звена и его дифференциальное уравнение.
Зависимость выходных величин от входных в динамическом режиме записывается в виде дифференциальных или разностных уравнений, в которых независимой переменной является время. Для теоретического исследования САУ необходима оценка каждого ее элемента не по устройству и назначению, а по зависимости от вида описывающего этот элемент. Благодаря тому, что многие элементы отличающиеся между собой по конструкции или по физической природе характеризуются однотипными уравнениями динамики, создается возможность все эти элементы представлять одной типовой моделью. Однако, такие модели могут оказаться достаточно сложными, а их число большим, что затрудняет исследование динамических свойств системы. Поэтому в теории автоматического управления элементы систем с точки зрения их динамических свойств представляют с помощью небольшого числа элементарных динамических звеньев.
Под элементарным динамическим звеном понимается искусственно выделяемая часть автоматической системы, соответствующая какому-либо элементарному алгоритму. Необходимо помнить, что звено обладает направленностью действий, т.е. направлением прохождения сигнала с входа на выход. Уравнение динамики всей системы можно получить из уравнений ее звеньев.
Типовые элементарные звенья характеризуются свойствами линейности и стационарности.
Звено называется линейным, если выходная величина y(t) связана с входной x(t) линейной зависимостью. Звено называется стационарным, если его реакция не зависит от времени.
Элементарные звенья описываются дифференциальными уравнениями не выше второго порядка. Если функциональный элемент или система описывается уравнением высокого порядка, то его математическая модель может быть представлена посредством нескольких элементарных звеньев.
Математическую модель элементарного звена в общем виде можно представить как:
 1.14
1.14
где а0,а1,а2,b0,b1,b2 – постоянные коэффициенты входной и выходной величины.








