 2014-01-25
2014-01-25 895
895Частичное уравновешивание шарнирно-рычажных механизмов
Уравновешивание динамических нагрузок на фундамент
При установившемся движении механизма ускорения центров тяжести звеньев изменяются циклически, как по величине, так и по направлению. Соответственно также изменяются и силы инерции. Если эти силы не уравновешены, то они влияют и на величину давления в кинематических парах и на стойку (раму) и фундамент машины.
Неуравновешенность машин не желательна по причинам:
§ Вызывает динамические нагрузки на фундамент
§ Уменьшает циклическую прочность звеньев
§ Уменьшает КПД машины
§ Снижает качество выполнения технологического процесса
§ Ухудшает условия труда обслуживающего персонала
§ И т.д.
По этой причине, при проектировании механизма, ставится задача путем специальных мероприятий обеспечить полное или частичное погашение этих динамических нагрузок. Решение этой задачи называется уравновешивание механизмов (уравновешивание сил инерции механизмов).
Эта задача может быть разделена на две самостоятельные задачи.
1. Уравновешивание динамических нагрузок на фундамент.
2. Уравновешивание динамических нагрузок в кинематических парах.
1. Уравновешивание динамических нагрузок на фундамент [2]
Как известно, любая система сил, приложенных к твердому телу, может быть приведена к одной силе (главный вектор), приложенной в точке приведения и к одному моменту относительно точки приведения (главный момент).
Для полного уравновешивания сил инерции звеньев необходимо
 (1)
(1)
Или, если выразить эти равенства через проекции сил инерции и моментов инерции на оси пространственной системы координат



Где: mi – масса i-ой точки звена;
 -проекции ускорений i-ой точки на оси x, y и z:
-проекции ускорений i-ой точки на оси x, y и z:
xi yi, zi – расстояние i-ой точки по соответствующей оси до начала системы координат.
Рассмотрим  плоский механизм на фундаменте (рисунок 1.1).
плоский механизм на фундаменте (рисунок 1.1).

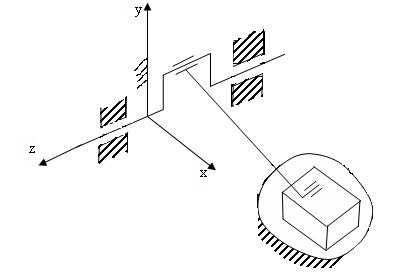
Рисунок 1.1
Будем полагать, что все звенья в механизме абсолютно жёсткие и находятся в плоскопараллельном движении. Система координат жёстко скреплена со стойкой. Удобно начало системы координат выбрать на оси вращения ведущего звена, а ось z совместить с осью вращения главного вала машины. В связи с этим, координата zi любой точки в плоском механизме есть величина постоянная и система уравнений условия уравновешивания будет выглядеть следующим образом
 (2)
(2)
 (3)
(3)
 , так как этот момент инерции должен рассматриваться совместно с приведёнными моментами движущих сил и сил сопротивления, и он всегда уравновешивается избыточным моментом М. Этот вопрос рассматривается в разделе регулирования хода машин.
, так как этот момент инерции должен рассматриваться совместно с приведёнными моментами движущих сил и сил сопротивления, и он всегда уравновешивается избыточным моментом М. Этот вопрос рассматривается в разделе регулирования хода машин.
Рассмотрим проекции ускорений на оси системы координат

Аналогично
Значения ускорений по осям y и x подставим в выражения (2) и (3)
Так как ε и ω постоянно меняются для выполнения этих равенств необходимо
Если первые уравнения будут выполняться, то вторые, полученные из первых путём дифференцирования по dφ, также будут выполняться автоматически, следовательно, вместо 8 уравнений достаточно выполнить 4 первых.
Рассмотрим статические моменты масс механизма относительно осей x и y
Где m – масса всех звеньев механизма, а xs и ys координаты общего центра масс.
Дифференцируя эти выражения по φ получим
Учитывая, что m ≠ 0, эти уравнения можно записать в следующем виде


Таким образом, для уравновешивания главного вектора сил инерции необходимо выполнить следующее условие

Т.е., для уравновешивания главного вектора сил инерции плоского механизма необходимо и достаточно так подобрать массы этого механизма, что бы общий центр масс механизма оставался неподвижным.
Рассмотрим выражения для центробежных моментов относительно плоскостей xz и yz
Дифференцируем эти выражения по углу поворота ведущего звена φ


Так как zi = const
Таким образом, для уравновешивания главного вектора момента сил инерции необходимо выполнить следующее условие


Т.е., для уравновешивания главных моментов сил инерции относительно осей х и y необходимо и достаточно подобрать массы механизма так, чтобы центробежные моменты инерции масс всех звеньев механизма относительно плоскостей xz и yz были постоянными.
Указанные условия обычно выполняются частично, в зависимости от конкретно поставленной задачи.
Частичное и даже полное уравновешивание сил инерции можно добиться установкой симметрично расположенных групп.
Например, схема двухпоршневого компрессора (рисунок 1.2)
Рисунок 1.2
Здесь первые два условия выполняются, а вторые – нет.
 -статическое уравновешивание
-статическое уравновешивание
 - момент сил инерции не уравновешивается.
- момент сил инерции не уравновешивается.
Если взять схему механизма кузнечно-прессовой машины (см. рисунок 1.3), то в ней даже статическое уравновешивание выполняется частично.
Рисунок 1.3
Простейшие механизмы (когда только одно звено) могут быть полностью уравновешены.








