 2014-01-25
2014-01-25 1293
1293Главный вектор будет равен 0, когда его проекции на координатные оси будут равны 0. Плоская система произвольных сил – силы, лежащие в одной плоскости линии действия которых произвольны.
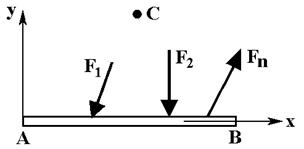 Для того, чтобы плоская система сил
Для того, чтобы плоская система сил
находилась в равновесии необходимо
и достаточно, чтобы сумма проекций
всех сил на оси координат и момент
всех сил относительно центра были
равны нулю.


или

ось Х не перпендикулярна прямой АВ;
или
А, В и С не лежат на одной прямой.
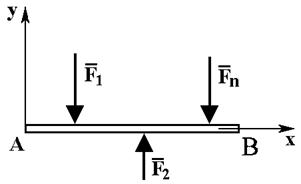
9.3. Условие равновесия плоской системы параллельных сил.

или
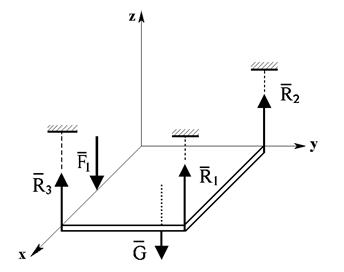
9.4. Условие равновесия пространственной системы произвольных сил.
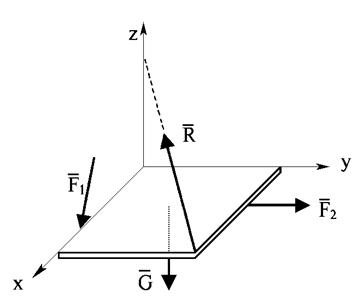




9.5. Условие равновесия пространственной системы параллельных сил.

10. Равновесие системы тел.
Расчёт инженерных конструкций во многих случаях сводится к рассмотрению условий равновесия конструкции, состоящей из системы тел, соединённых какими-нибудь связями. Связи, соединяющие части данной конструкции, называются внутренними, в отличие от внешних, соединяющих конструкцию с телами, не входящими в неё.
Для определения всех реакций, необходимо рассмотреть равновесие конструкции, т.е. пользоваться условиями равновесия всех сил, действующих на конструкцию.
Первый способ:
Равновесие всей конструкции, затем равновесие одной из частей конструкции.
Второй способ:
 Пример:
Пример:
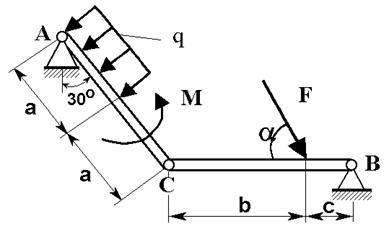
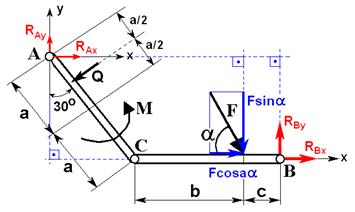
Дано:
а = 2 м; b = 3 м; с = 1 м; α = 600; F = 10кН; q = 8 кН/м; М = 6 кНм.
Найти реакции опор:
RAx; RAy; RBx; RBy,
Второй способ:
Разрежем конструкцию по шарниру С и рассмотрим равновесие стержней АС и СВ по отдельности.
Стержень СВ
Действие опоры В на стержень заменим реакциями RBx и RBy. Действие стержня АС на стержень СВ в шарнире С заменим реакциями RСx и RСy.
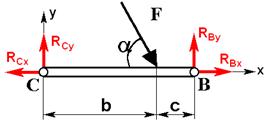
Составим уравнения равновесия статики:
1) 

2) 

3) 

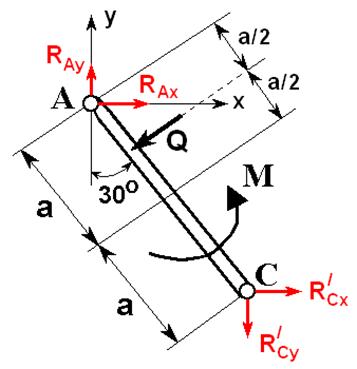
Стержень АС
Действие опоры А и стержня СВ на стержень АС заменим реакциями RAx; RAy; R/Cx = -RCx; R/Cy = -RCy; Распределённую нагрузку q заменим результирующей силой Q = q . a = 8 . 2 = 16 кН, приложенной посередине участка а.
Составим уравнения равновесия статики:
4)

5)

6) 

Из уравнения (1):

Из уравнения (2):

Из уравнения (4):

Из уравнения (5):

Из уравнения (3):

Из уравнения (6):

Для проверки правильности вычислений составим уравнение моментов относительно шарнира С для стержня АС.

Подставим значения

Ответ: RAx = 9,73 кН; RAy = 10,16 кН; RBx = -0,87 кН; RBy = 6,5 кН.
Знак (-) показывает, что действительное направление реакции RBx противоположно выбранному.
Первый способ:
Сначала рассмотрим одну из частей конструкции в равновесии: участок СВ (смотри выше), затем рассмотрим равновесие целой конструкции.
Запишем уравнения равновесия.
7) 
8) 
9) 

Из уравнения (1) RBy = 6,5 кН
Из уравнения (9)
Из уравнения (7)

Из уравнения (8)

Ответ: RAx = 9,73 кН; RAy = 10,16 кН; RBx = -0,87 кН; RBy = 6,5 кН.
Знак (-) показывает, что действительное направление реакции RBx противоположно выбранному
11. Центр тяжести.
11.1. Центр параллельных сил.
Рассмотрим систему параллельных сил, приложенных к телу.
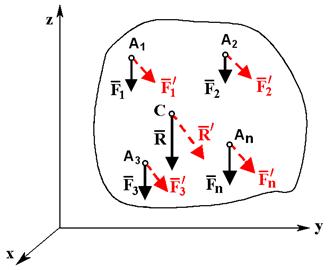
Равнодействующая этой системы направлена также, как слагаемые силы и равна по модулю:

Если поворачивать каждую силу около её точки приложения в одну сторону и на один угол, то получим новую систему параллельных сил с теми же модулями и точками приложения, но с другим направлением. Равнодействующая новой системы будет иметь тот же модуль, но другую линию действия, причём линия действия проходит через одну и ту же точку.
Точка С, через которую проходит линия действия равнодействующей системы параллельных сил, называется центром параллельных сил.
Найдём координаты центра параллельных сил.
Покажем оси координат OXYZ. Обозначим координаты точек А1(x1;y1;z1); А2(x2;y2;z2); C(xc;yc;zc);
Для системы параллельной оси OZ применим теорему Вариньона для нахождения моментов относительно оси Y.



Аналогично:
11.2. Центр тяжести твёрдого тела.
На любую частицу тела вблизи земной поверхности действует направленная вертикально вниз сила, называемая силой тяжести. Для тел, размеры которых малы по сравнению с радиусом Земли (R» 6378 км), силы тяжести можно считать параллельными.
Равнодействующая сил тяжести р1; р2;…; рк, действующих на частицы тела Р = å рк, называется весом тела.
Центр тяжести твёрдого тела – точка, связанная с телом, через которую проходит линия действия равнодействующей сил тяжести частиц данного тела при любом положении тела в пространстве.
Координаты центра тяжести:
где: xк, yк, zк – координаты точек приложения сил тяжести рк частиц тела.
11.3. Координаты центров тяжести однородных тел.
Для однородного тела вес любой его части пропорционален объёму, рк= cVк, а вес всего тела пропорционален объёму всего тела V, p = cV.
c - вес единицы объёма, т.е. объёмный вес.
Здесь точка С – центр тяжести объёма V.
Аналогично определяем центр тяжести площади А:
или центр тяжести линии:

11.4. Способы определения координат центров тяжести тел.
1. Способ симметрии.
Если однородное тело имеет плоскость, ось или
центр симметрии, то его центр тяжести лежит
соответственно в плоскости, на оси или в центре
симметрии.
2. Способ разбиения.
Если тело можно разбить на конечное число таких
частей, для каждой из которых известно положение
центра тяжести, то координаты центра тяжести
всего тела можно вычислить по формулам. При
этом число слагаемых в числителе равно числу
частей, на которое разбито тело.
3. Способ дополнения.
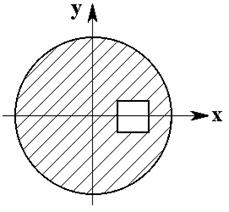
Этот способ является частным случаем способа
разбиения. Он применяется к телам, имеющим
вырезы, если центр тяжести тела без выреза и
вырезанной части известны.
4. Способ интегрирования.
Если тело нельзя разбить на несколько конечных частей, положение центров тяжести которых известны, то тело разбивают на произвольное число малых объёмов, для которых формулы принимают вид:
5. Экспериментальный способ.
Применяется для определения центра тяжести неоднородного тела сложной конфигурации.
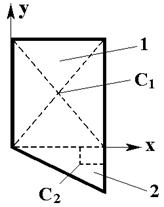
Пример:
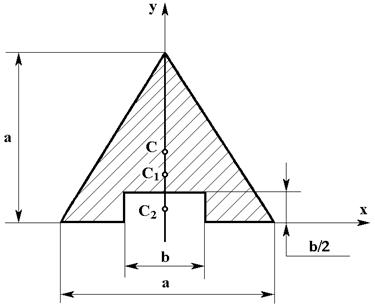
A1 = a2 / 2 A2 = -b2 /2 C1 (X1 = 0; У1 = а / 3) С2 (Х2 = 0; У2 = b / 4)


12. Трение
12.1. Трение скольжения.

