 2018-03-09
2018-03-09 294
294
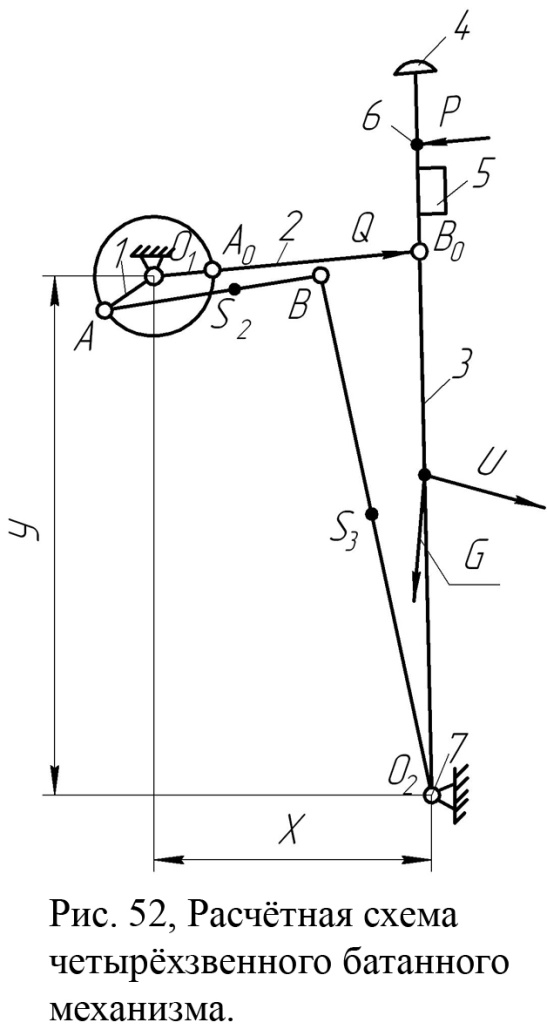
Четырехзвенный батанный механизм. Этот тип механизма (рис. 52) является основным и включает кривошип 1 (колено), поводок 2 и батан 3 (лопасть батана), 4 – вершник, 5 – склиз батана, 6 – бердо, 7 - подбатанный вал.
На автоматических ткацких, станках типа AT радиус лопасти R = В02 примерно в десять раз длиннее радиуса r = 01А кривошипа и конструктивные параметры механизма имеют следующие значения: х = 450 мм, у = 634 мм, r = 70 мм, АВ = 264 мм и R = 726 мм
На батан во время работы действуют силы: Р - сила, действующая со стороны опушки ткани, Q - сила, действующая со стороны коленчатого вала, G - сила тяжести батана(лопасти), U - сила инерции.
Нормальное отношение длины ℓ поводка к радиусу кривошипа r составляет ℓ/r ≈4. Если отношение ℓ/r ≤3, тогда механизм называется с коротким поводком, и если равно или больше пяти — с длинным поводком.
При кинематических исследованиях батанных механизмов необходимо знать пути, скорости и ускорения батана в функции времени или угла поворота коленчатого вала станка. Эта задача может быть решена аналитическими или графоаналитическими методами. Последний метод основан на построении планов скоростей и ускорений.
Планы скоростей строятся в масштабе.

где vA- фактическая скорость пальца кривошипа А,
 -вектор скорости в мм.
-вектор скорости в мм.
Текущее значение угловой скорости ω1 кривошипа 1 определяется с учётом неравномерности его вращения.
Линейная скорость vAточки А (рис. 52)

Скорость точки В:

По плану скоростей (рис. 53) находим угловые скорости поводка и батана

Рассмотрим силы действующие на механизм:

где: С1-коэффициент жесткости основы в заправке кг/см.
С2- коэффициент жесткости ткани кг/см.
 -ширина прибойной полоски 4÷6мм
-ширина прибойной полоски 4÷6мм
| q |
| P |
| Q |
| U |
Построив силовой многоугольник сил, можно определить Q.
На палец лопасти батана и на поводок действует сила Q1=Q/2
 Палец можно рассматривать как балку лежащую на 2-ух опорах, нагруженной силой Q1, тогда изгибающий момент в опасном сечении будет равен:
Палец можно рассматривать как балку лежащую на 2-ух опорах, нагруженной силой Q1, тогда изгибающий момент в опасном сечении будет равен:
| Q1 |
| A |
| B |
| l |
Для инерционных сил батана:

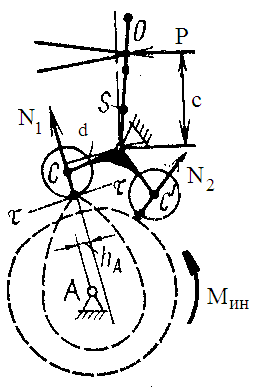
1 – главный вал Р – сила прибоя
2 – спаренные кулачки Мин – момент инерции
3 – ролики N1 / N2 – реакции
4 – рычаги роликов d –плечи рычагов
(коромысло)
5 – лопасти батана
6 – подбатанный вал
7 – бердо
Кулачковые батанные механизмы обладают тем преимуществом, что позволяют, задать любой закон движения батану и обеспечить его необходимый выстой в крайнем заднем положении. Это обстоятельство позволяет увеличить скорость станка без увеличения нагрузки на звенья боевого механизма.
Кулачковые батанные механизмы устанавливаются на бесчелночных ткацких станках типа СТБ, «Зульцер» и некоторых видах челночных станков.
Батан получает движение от главного вала 1, на котором посажены дисковые спаренные кулачки 2 контактирующие с роликами 3, закрепленными на рычагах 4. Рычаги 4 вместе с лопастями батана 5 жестко закреплены на подбатанном валу 6. К лопасти 5 крепиться бердо 7. Замыкание механизма геометрическое, механизм полностью находиться в масляной ванне. В каждый данный момент ведущим является один из кулачков, второй ведомым.
Наибольшее контактное напряжение между роликом и ведущим кулачком возникает вначале движения батана к опушке ткани, что составляет приблизительно 100 угла поворота главного вала.
Чтобы механизм не стучал необходимо, чтобы ролики всегда находились в контакте с кулачками. Для этого ведомый кулачок прижимается к ролику с силой не менее 10 – 15 кг. Тогда можно записать уравнение моментов относительно точки качания О:
Pc-+ Mин + N2d – N1d = 0 (1)
Р = λ(С1 + С2) (2)
С1 – коэффициент жесткости основы в заправке кг/см
С2 – коэффициент жесткости ткани кг/см
λ – ширина прибойной полоски, 4-6 мм
Mин = - Iε, тогда N1 = Pc-+ Mин + N2d / d
Момент инерции следует рассчитывать пропорционально ширине станка. Определив таким образом усилие между роликом и кулачком можно провести расчет пары на контактные напряжения.
 (8)
(8)
N0=N1cosα - нормальное давление направленное перпендикулярно к поверхности контакта.
Радиус кривизны профиля в данной точке - ρ
b -длина линии контакта ролика с кулачком.
Епр – приведенный модуль упругости
r– радикс ролика
Наиболее опастным для пары является касательное напряжение τ, которое приводит к питтингу.
1) при отсутствии проскальзывания ролика по кулачку
 (9)
(9)
2) при условии проскальзывания ролика по кулачку
 (10)
(10)
Допускаемое напряжение: для сталей марок 40ХН и 40Х, [σк]=1200 кг/см2
для модифицированного чугуна СЧ 28-48 [σк]=72 кг/мм2
для серого чугуна СЧ 32-52 [σк]=78 кг/мм2








