 2018-02-13
2018-02-13 1024
10244.1. Инерциальный измерительный модуль
Инерциальный измерительный модуль на базе ВОГ, акселерометров и встроенного микрокомпьютера предназначен для выработки курса и динамических параметров движения быстроходных судов, катеров, яхт и наземного транспорта.
При интегрировании с ПА GPS/ГЛОНАСС точность определения координат места, скорости и путевого угла соответствует параметрам используемого приемника с учетом инерциального сглаживания помех на интервале до 100 с.
Интерфейс канала связи — RS232 по протоколу NMEA 0183. Выдача потребителю угла курса, динамических и навигационных параметров движения по интерфейсу RS 232/422/485 на частоте до 100 Гц.
Электропитание системы – 24В постоянного тока. Потребляемая мощность – 60 Вт.
Время готовности – не более 60 мин (в зависимости от температуры окружающей среды).
Габаритные размеры – Æ252x342 мм, Масса – 17 кг.
Допустимые значения погрешностей выработки
- курса географического...................................................................... 0,4°secj;
- углов качки и рыскания................................................................... 0,1°;
- составляющих угловой скорости по трем осям........................... 0,1°/с;
- составляющих линейной скорости качки...................................... 0,1 м/с;
- вертикальных перемещений........................................................... 0,1 м;
- вертикальных ускорений................................................................. 0,1 м/с2.
Указанные погрешности выработки динамических параметров движения обеспечиваются при качке до 15°.
- линейная скорость............................................................................ до 60 узлов,
- углы качки......................................................................................... до 45°,
- угловые скорости качки.................................................................. до 30°/с,
- линейные ускорения........................................................................ до 2g,
- диапазон рабочих температур......................................................... 0…+55°C,
- диапазон предельных температур (для хранения изделия)........... -20…+60°C,
- допустимый уровень одиночных ударов....................................... до 20g.
БИИМ на ВОГ
БИИМ на ВОГ (прибор ВИИМ – рис. 1) является основным прибором изделия «Мининавигация-К» и состоит из измерительного модуля (ИМ) с блоком электроники и основания с элементами системы автокомпенсационного вращения.
Состав ИМ:
· три ВОГ (ВГ 951);
· три линейных акселерометра АК10/4 (с кварцевым чувствительным элементом);
· плата вторичного источника питания (ВИП) чувствительных элементов;
· плата системы термостатирования (СТС) с нагревательными транзисторами и терморезистором;
· плата датчика температуры (ДТ);
· модуль аналогового ввода-вывода (АЦП) DM6430HR-1;
· модуль процессорный СМС16686GX300HR-32;
· расширитель интерфейса РСМ-3610-А;
· источник питания IPWR104-L60W;
· плата индикации.
Состав основания:
· микроконтроллер МК-БСС управления моментным двигателем и датчиком угла;
· моментный двигатель БМДР-12-2;
· преобразователь угла ИПУ-ДУЦ;
· токоподвод неограниченного угла вращения;
· арретир.
ВОГ и акселерометры являются чувствительными элементами прибора, которые измеряют вращательное и поступательное движение носителя в пространстве. Для обеспечения выработки навигационных и динамических параметров движения объекта с требуемой точностью используется автокомпенсационное вращение ИМ и внешняя информация от потребителя о скорости движения и месте нахождения носителя.
Часть №1 «ИСОН. Исследование режима начальной выставки и калибровки БИИМ на ВОГ в условиях стенда».
Для реализации режима начальной выставки и калибровки БИИМ на ВОГ в условиях стенда используются скоростные (2) и позиционные измерения (3) по GPS, а также курсовое измерение (4). При этом вектор измерения Z примет вид  .
.
Таблица 1. Значения румба и начальные значения погрешностей БИИМ на ВОГ.
| Вариант | Значение румба (№) | Погрешности углового положения горизонтной системы координат с географической ориентацией осей
| Погрешности проекций скорости движения географической системы координат (
| Погрешности декартовых координат объекта (δΔ S E0, δΔ S N0, высоты h) | |||||||
| [град] | [град] | [м/с] | [м] | ||||||||
| цикл | Alphao | Betao | Gammao | DVEo | DVNo | DVHo | δΔ SE 0 | δΔ SN 0 | Dho | ||
| I | II | ||||||||||
| 10 | -180 | -300 | 0.3 | 0.1 | -0.1 | 0.2 | -0.2 | 0.1 | 10 | 25 | 1.5 |
 , (α, β, γ)
, (α, β, γ)
Таблица 2. Сводная таблица результатов.
| цикл № | Оценки смещения нулей | Оценки погрешностей масштабных коэффициентов ВОГ | |||||||
| гироскопов, ·104 | акселерометров, | ||||||||
 |  |  |  |  |  |  |  |  | |
| I | 0.2 | -0.1 | 0.4 | -11 | -0.5 | 5 | 0 | 0 | -6 |
| II | 0.75 | 0.5 | -0.3 | -0.011 | 0.001 | 0.008 | 0 | 0 | -2.5 |
| среднее | 0.475 | 0.2 | 0.05 | -5.5055 | -0.2495 | 2.504 | 0 | 0 | -4.25 |


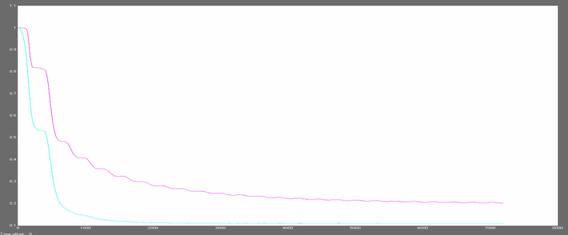
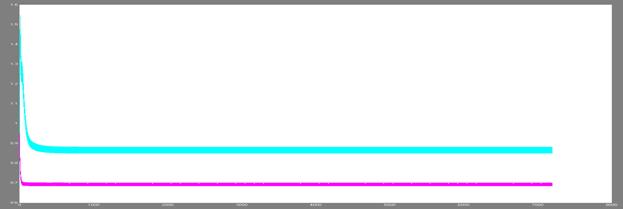
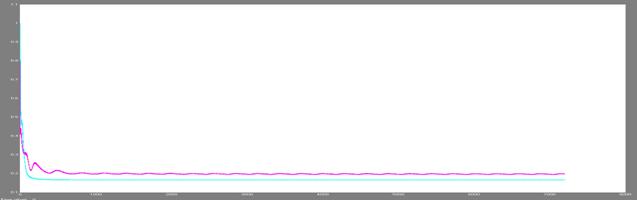
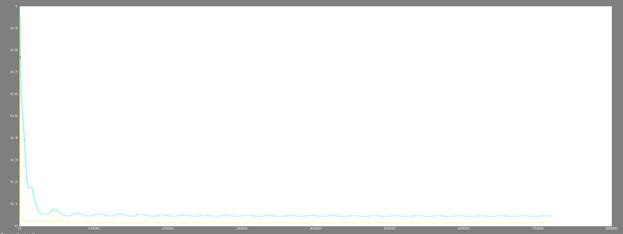
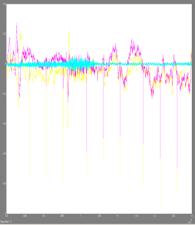
Результаты моделирования для цикла I (румб -180˚)
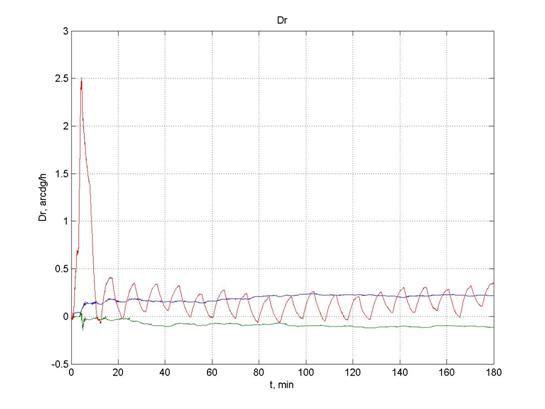
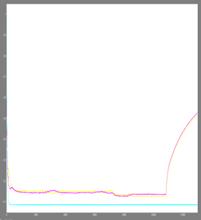
Рис. 1. Оценка смещений нулей гироскопов.
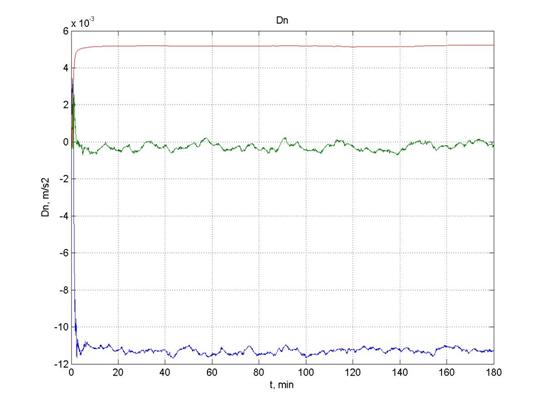
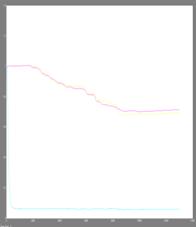
Рис. 2. Оценка смещений нулей акселерометров.
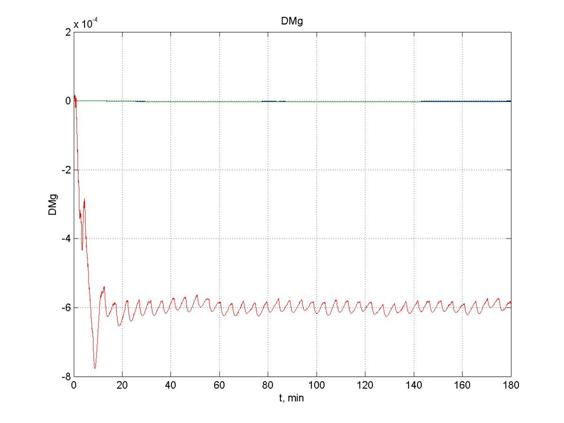
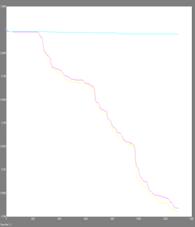
Рис. 3. Оценка погрешностей масштабных коэффициентов гироскопов.
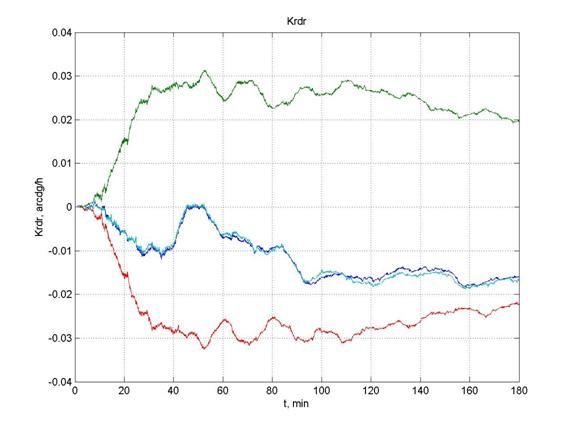
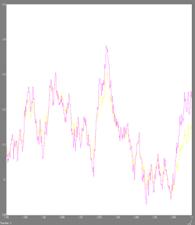
Рис. 4. Оценка погрешностей коэффициентов румбовых дрейфов гироскопов.
Результаты моделирования для цикла II (румб -300˚)
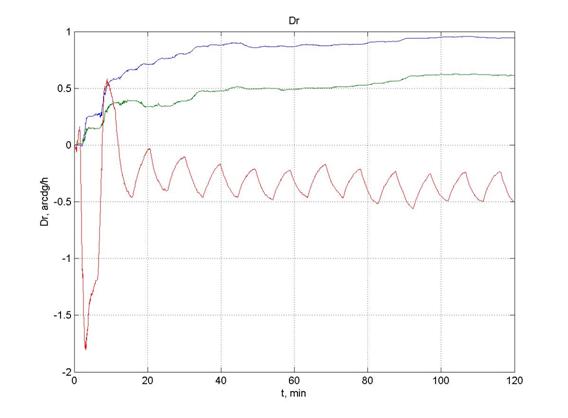
Рис. 5. Оценка смещений нулей гироскопов.
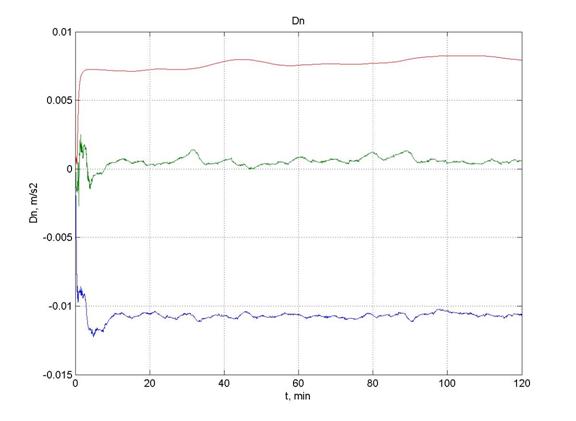
Рис. 6. Оценка смещений нулей акселерометров.
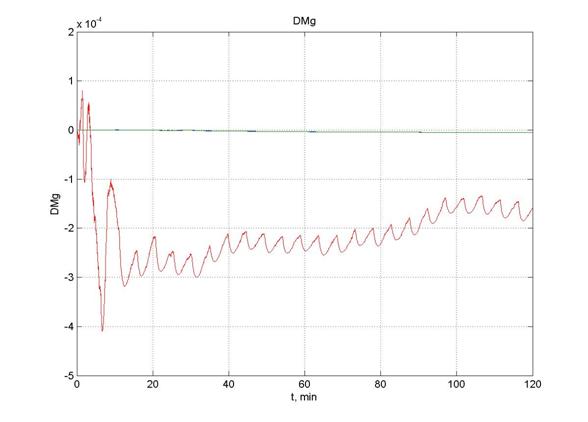
Рис. 7. Оценка погрешностей масштабных коэффициентов гироскопов.
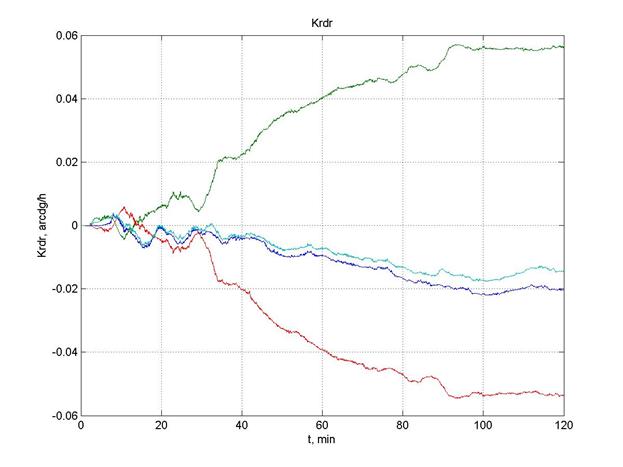
Рис. 8. Оценка погрешностей коэффициентов румбовых дрейфов гироскопов.

-PCAk
-PCDr

-PCMg
-PdS
-PdV
-POr
Ковариационный канал ФК.
Выводы:
Режим начальной выставки и калибровки, предусматривает нахождение оценок начального состояния погрешностей системы, т.е. возможность оценить наблюдаемость погрешностей гироскопов и акселерометров и уровень ошибок их оценок.
1) Погрешности смещения нулей гироскопов (рис.1, рис.5) и акселерометров (рис.2, рис.6) в данном режиме работы ИСОН наблюдаемы.
2) Из-за использования модуляционных поворотов БИИМ можно оценить погрешность масштабного коэффициента (рис.3, рис.7) гироскопа в вертикальном канале.
3) Румбовые дрейфы ВОГ данного БИИМ (рис.4, рис.8) обусловлены влиянием возмущающих моментов, связанных как с корпусом БИИМ (влияние магнитного поля корабля), так и с географическими осями (магнитное поле Земли). Использование в морских инерциальных навигационных системахмодуляционных поворотов позволяет повысить точность определения коэффициентов румбовых дрейфов гироскопов, но в условиях неподвижного объекта отсутствует наблюдаемость погрешности румбовых дрейфов гироскопов.
Часть №2 «ИСОН. Обсервационный и автономный режимы работы ИСОН на основе БИИМ на ВОГ, ПА GPS и лага в условиях неподвижного объекта».
Для реализации обсервационного режима работы БИИМ на ВОГ в условиях стенда используются скоростные (2) и позиционные измерения (3) по GPS. При этом вектор измерения Z примет вид:  .
.
При реализации автономного режима используются только скоростные измерения по лагу (5)
 .
.
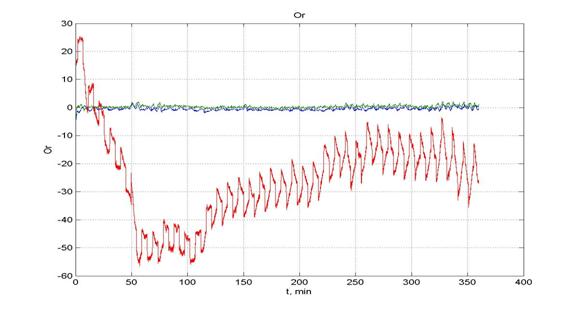
Рис. 9 Оценка значений погрешностей ИСОН по параметрам ориентации.
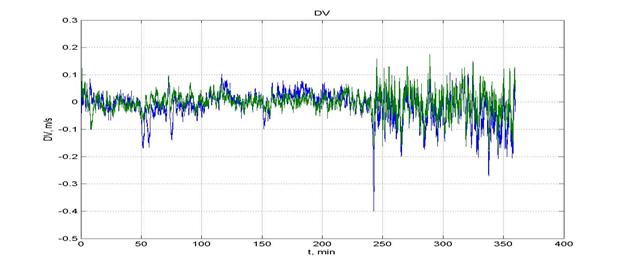
Рис. 10 Оценка значений погрешностей ИСОН по составляющим вектора линейной скорости.
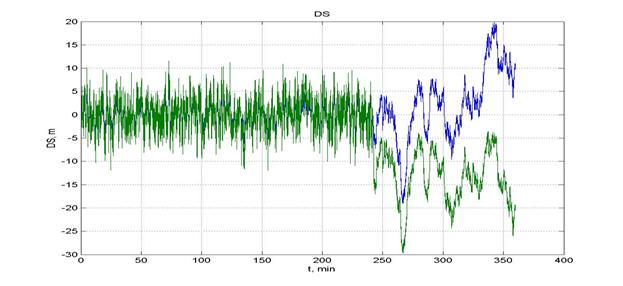
Рис. 11 Оценка значений погрешностей ИСОН по составляющим вектора координат места.
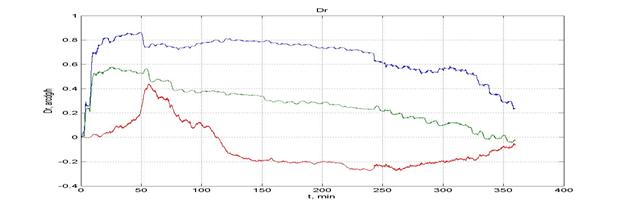
Рис. 12 Оценка смещений нулей гироскопов.
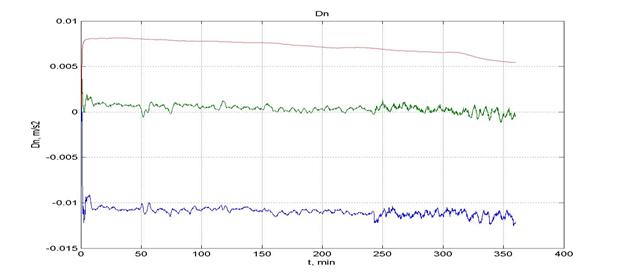
Рис. 13 Оценка смещений нулей акселерометров.
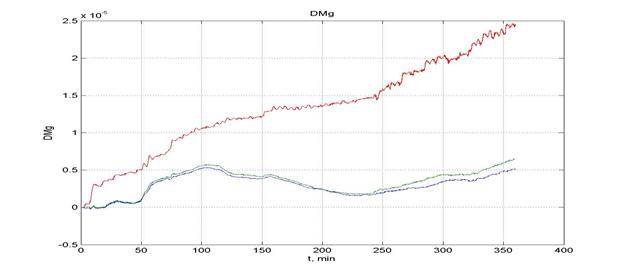
Рис. 14 Оценка погрешностей масштабных коэффициентов гироскопов.
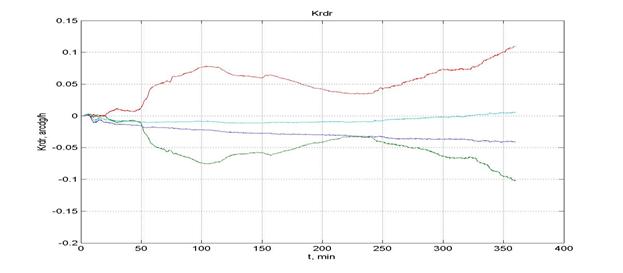
Рис. 15 Оценка коэффициентов румбовых дрейфов гироскопов.
Вывод:
Обсервационный режим работы ИСОН характеризуется практически непрерывным использованием данных СНС ГЛОНАСС или GPS в течение длительного интервала времени. В данном режиме предусматривается нахождение оценок и коррекция текущего состояния погрешностей ИСОН.
В автономном режиме для демпфирования шулеровских колебаний погрешностей аналога вертикали БИИМ и обеспечения устойчивости его вертикальному каналу используется информация относительного лага и глубиномера или высотомера.
1) Погрешности смещений нулей гироскопов являются наблюдаемыми как в обсервационном, так и в автономном режимах работы.
2) Определяющим моментом для достижения требуемого уровня погрешностей выработки курса является точность калибровки (не хуже 0,1 0/ч) “румбовых” дрейфов измерительного блока БИИМ при работе ИСОН в обсервационном режиме, который может обеспечиваться применением GPS/ГЛОНАСС. Румбовые дрейфы ВОГ данного БИИМ, обусловленные при использовании реверсных поворотов ИБ прежде всего влиянием внешнего магнитного поля, находятся в пределах 0.1 0/ч.
Допустимое время работы ИСОН в автономном режиме (при отсутствии морских течений) при удержании погрешностей координат места на уровне 100м для данной системы не определить, т.к. за время наблюдения погрешности координат места достигли лишь величины 30 м.
Часть №3 «ИСОН. Обсервационный и автономный режимы работы ИСОН на основе БИИМ на ВОГ, ПА GPS и лага при мореходных испытаниях»
§ При выполнении лабораторной работы используются результаты натурных испытаний ИБ, в частности массивы данных мореходных испытанийИБ на ВОГ с постоянным вращением с периодом 1мин в условиях маневрирования по курсу.
Для реализации обсервационного режима работы БИИМ на ВОГ в условиях эксплуатации используются скоростные (2) и позиционные измерения (3) по GPS. При этом вектор измерения Z примет вид: .
Перед переходом из обсервационного в автономный режим в течение 1 часа используется не только измерения, сформированные по GPS, но и скоростные измерения по лагу
 .
.
При реализации автономного режима используются только скоростные измерения по лагу (5)
 .
.
Таблица 3 Исходные требования.
| Вариант | Использование GPS при формировании позиционных ( | Измеритель курса (для разложения вектора горизонтальной скорости от GPS V_s (и лага), см. рис. 6, Блок 5) | |||||
| в начале маневрирования | при наборе хода | приборный БИИМ (K) | гирокомпас (K_gk) | GPS (МРК) (K_gkmr) | |||
| позиционные | скоростные | позиционные | скоростные | ||||
| 8 | + | + | + | + | + | - | - |
 ) и скоростных (
) и скоростных ( ) измерений
) измерений
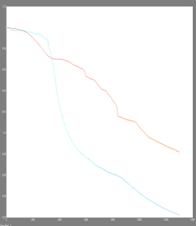
Рис. 16 Оценка значений погрешностей ИСОН по параметрам ориентации.
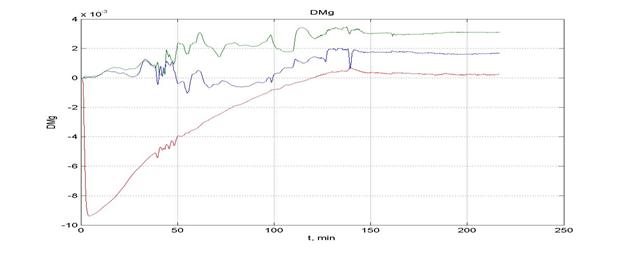
Рис. 17 Оценка погрешностей масштабных коэффициентов гироскопов.
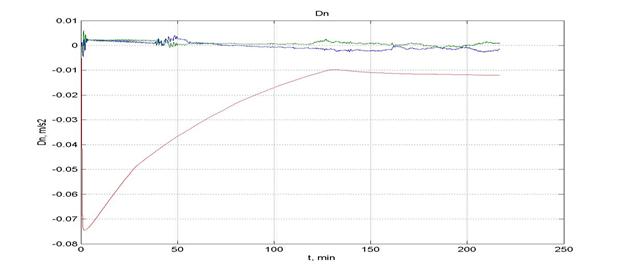
Рис. 18 Оценка смещений нулей акселерометров.
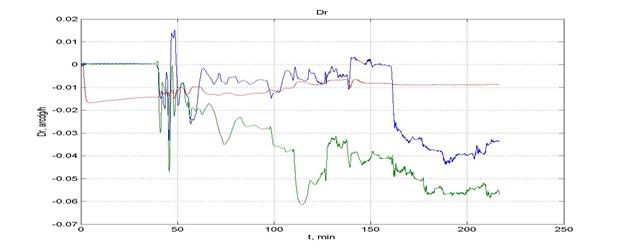
Рис. 19 Оценка смещений нулей гироскопов.
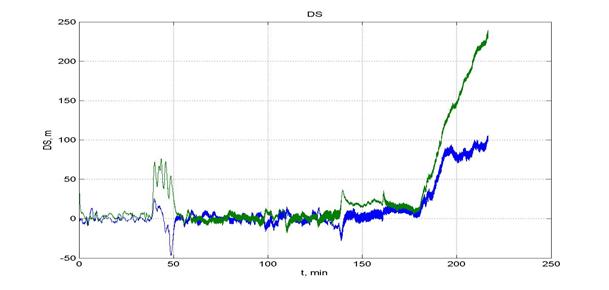
Рис. 20 Оценка значений погрешностей ИСОН по составляющим вектора координат места.
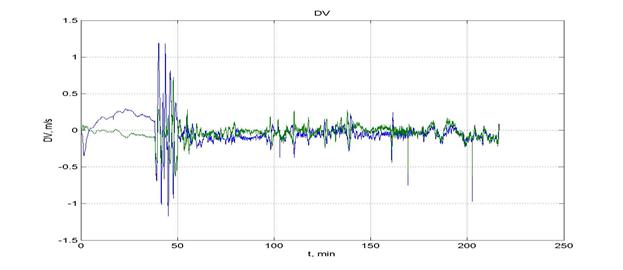
Рис. 21 Оценка значений погрешностей ИСОН по составляющим вектора линейной скорости.
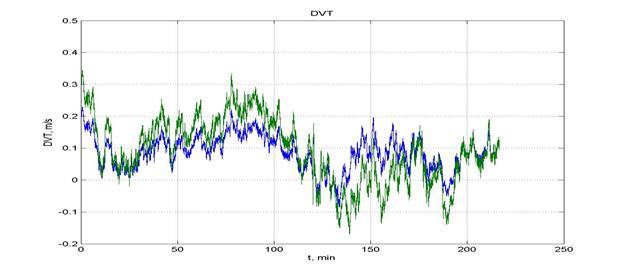
Рис. 22 Изменение погрешности оценки величины линейной скорости течения, выработанной ФК.
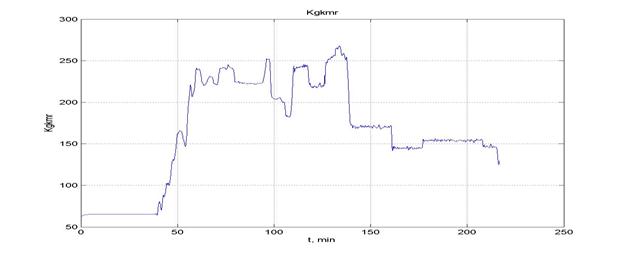
Рис. 23 Значения курса корабля при испытаниях (гирокомпас и МРК).
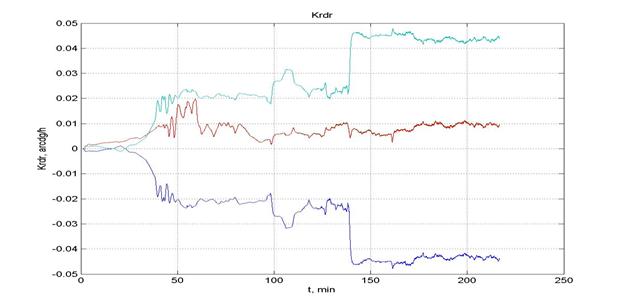
Рис. 24 Оценка коэффициентов румбовых дрейфов гироскопов.


POr PdV PdS

PCAk PCDr PCMg
DVT dV PDKrdr
Рис.25 Ковариационный канал ФК.
Выводы:
1) В обсервационном и автономном режимах работы погрешности смещений нулей акселерометров являются наблюдаемыми, а погрешности смещений нулей гироскопов наблюдаемыми не являются.
2) Точность оценки масштабных коэффициентов гироскопов БИИМ существенно повышается в условиях качки и рыскания объекта. Масштабные коэффициенты гироскопов становится возможным оценить, а использование модуляционных реверсных поворотов ИБ позволяет сделать погрешность масштабного коэффициента  наблюдаемой величиной.
наблюдаемой величиной.
3) Румбовые дрейфы гироскопов достигают величины 0,05˚/ч.
4) Погрешности координат места при мореходных испытаниях в обсервационном режиме находятся в пределах 100м. При переходе в автономный режим работы эти погрешности становятся ненаблюдаемыми.








