 2018-02-14
2018-02-14 797
797В зависимости от количества выходных величин и, соответственно, количества дифференциальных уравнений, которыми описываются процессы в объекте, различают объекты одномерные и многомерные. Например, резервуар для жидкости, (рис.2).

Рис.2
Входными величинами являются приход Fпp и расход Fpжидкости, а выходной величиной - уровень. Это одномерный объект. Он описывается одним уравнением статики L = f(Fпp, Fp) и одним уравнением динамики L = f(Fпp, Fp, t).
Другой пример - аппарат для выпаривания однокомпонентной жидкости при непрерывном отборе паровой фазы (рис.3)
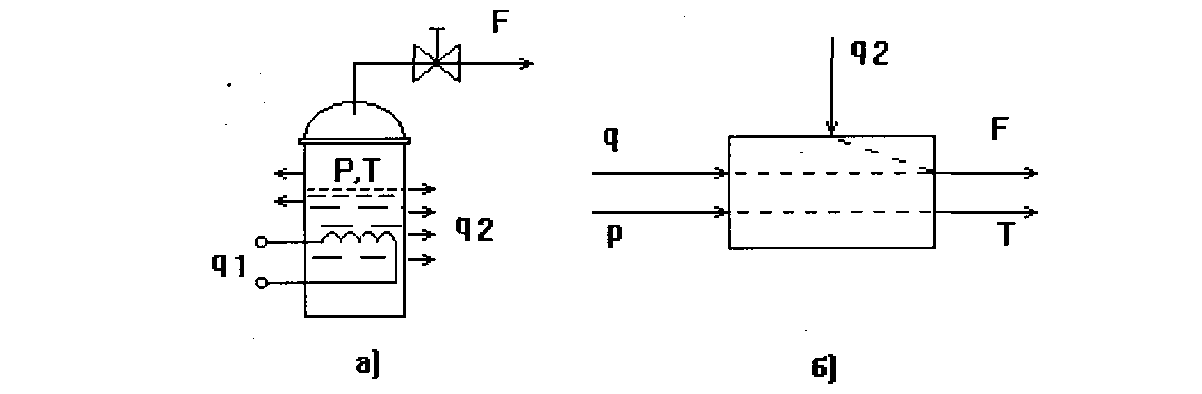
Рис.3
Тепловой поток аппарата равен разности притока тепла q1 и потерь q2. Он определяет расход пара F, т.е. изменение скорости нагрева изменяет лишь скорость образования пара. Давление же в системе Р определяется температурой процесса испарения Т. Этот объект описывается двумя уравнениями статики F = f(q1, q2), Т = f(P) и двумя уравнениями динамики F = f(q1, q2, t), Т = f(P, t).
Взаимосвязь переменных в объекте показывается на схемах динамических каналов (например, рис. 4, б).В общем случае в многомерных объектах может проявляться взаимозависимость выходных величин. Изменения в таких объектах входных величин приводит к одновременному изменению нескольких выходных. Например, экзотермический реактор идеального перемешивания (рис.4). Реактор имеет пять входных величин - концентрация Qн и температура Тн реагентов на входе в реактор, расход реагентов F, тепло, отдаваемое из реактора системой охлаждения и определяемое расходом хладагента Fc и его температурой Тс. Выходными величинами являются концентрация продуктов реакции и температура в реакторе Т.
Для стабилизации температуры Т в реакторе изменяется расход хладагента Fc, а для обеспечения постоянства продуктов реакции Q - расход F реагентов. При этом изменение расхода Fc вызывает также изменение состава продуктов реакции Q, а колебание расхода исходных реагентов F приводит к изменению температуры в реакторе. Кроме этого, выходные величины (Q, T) зависят от концентрации Qн и Тн входного продукта, а также температуры хладагента Тс. Выходные величины такого реактора находят из уравнений динамики Q = f1(F, Fc, Qн, Tн, Tc, t), Т = f2(Fс, F, Qн, Тн, t).
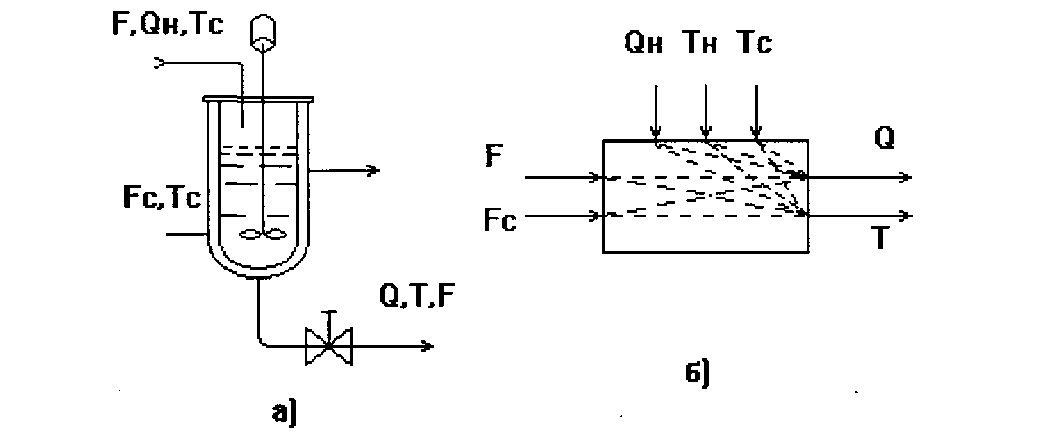
Рис.4
ПРИНЦИП ДЕЙСТВИЯ И КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Технологические процессы, осуществляемые на предприятиях нефтяной и газовой промышленности, обычно представляют в виде динамических систем, поведение которых во времени определяется такими параметрами, как температура, давление, расход, уровень, концентрация и др. При нормальном протекании процесса эти параметры принимают определенные, так называемые номинальные значения.
Указанные параметры могут отклоняться от номинальных значений в силу ряда внешних причин (изменение расхода и др.) или явлений, протекающих в самом аппарате (условий передачи тепла через поверхность и др.). Это приводит к нарушению технологического процесса и, как следствие, к снижению количества и качества получаемой продукции.
В связи с этим для нормального протекания процесса им необходимо управлять.
Управление - это целенаправленное воздействие на технологический объект управления (ТОУ), которое обеспечивает его функционирование и качественно оценивается величиной критерия управления.
Критерии могут иметь технологическую или экономическую природу (производительность технологической установки, себестоимость продукции и т.п.).
Регулирование - частный случай управления, используемый в локальных системах и означающий стабилизацию технологического параметра, т.е. поддержание выходных параметров объекта регулирования (OP) вблизи требуемых постоянных значений посредством подачи на объект регулирующего воздействия.
Структурная схема объекта регулирования представлена на рис. 1.








