 2020-01-15
2020-01-15 733
733
Процесс сканирования поверхности в сканирующем зондовом микроскопе имеет сходство с движением электронного луча по экрану в электроннолучевой трубке телевизора. Зонд движется вдоль линии (строки) сначала в прямом, а потом в обратном направлении (строчная развертка), затем переходит на следующую строку (кадровая развертка). Движение зонда осуществляется с помощью сканера небольшими шагами под действием пилообразных напряжений, формируемых цифро-аналоговыми преобразователями. Регистрация информации о рельефе поверхности производится, как правило, на прямом проходе.
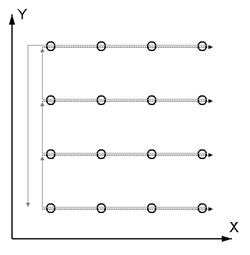
Рисунок 7. Схематическое изображение процесса сканирования. Регистрация информации производится в точках на прямом проходе
Информация, полученная с помощью сканирующего зондового микроскопа, хранится в виде СЗМ кадра - двумерного массива целых чисел (матрицы). Физический смысл данных чисел определяется той величиной, которая оцифровывалась в процессе сканирования. Каждому значению соответствует определенная точка поверхности в пределах поля сканирования.
Как правило, СЗМ кадры представляют собой квадратные матрицы, имеющие размер 2n (в основном 256×256 и 512×512 элементов). Визуализация СЗМ кадров производится средствами компьютерной графики, в основном, в виде трехмерных (3D) и двумерных яркостных (2D) изображений. При 3D визуализации изображение поверхности Z=f(x,y), соответствующей СЗМ данным, строится в аксонометрической перспективе с помощью пикселей или линий. В дополнение к этому используются различные способы подсвечивания пикселей, соответствующих различной высоте рельефа поверхности. Наиболее эффективным способом раскраски 3D изображений является моделирование условий подсветки поверхности точечным источником, расположенным в некоторой точке пространства над поверхностью (рисунок 8). При этом удается подчеркнуть мелкомасштабные неровности рельефа. Также средствами компьютерной обработки и графики реализуются масштабирование и вращение 3D СЗМ изображений. При 2D визуализации каждой точке поверхности Z=f(x,y) ставится в соответствие цвет.
Наиболее широко используются градиентные палитры, в которых раскраска изображения производится тоном определенного цвета в соответствии с высотой точки поверхности. На рисунке 9 для примера приведено 2D изображение участка поверхности [3].


Рисунок 8. 3D визуализация рельефа поверхности с подсветкой по высоте (а) и с боковой подсветкой (б)

Рисунок 9. Яркостное 2D изображение поверхности
Локальные СЗМ измерения, как правило, сопряжены с регистрацией зависимостей исследуемых величин от различных параметров. Например, это зависимости величины электрического тока через контакт зонд-поверхность от приложенного напряжения, зависимости различных параметров силового взаимодействия зонда и поверхности от расстояния зонд-образец и др. Данная информация хранится в виде векторных массивов или в виде матриц размерностью 2×N. Для их визуализации в программном обеспечении микроскопов предусматривается набор стандартных средств изображения графиков функций.
СЗМ изображения, наряду с полезной информацией, содержат также много побочной информации, искажающей данные о морфологии и свойствах поверхности. На рисунке 10 схематически представлены возможные искажения в СЗМ изображениях поверхности, обусловленные неидеальностью аппаратуры и внешними паразитными воздействиями.

Рисунок 10. Основные составляющие СЗМ-изображений без программной обработки
- вычитание постоянной составляющей
СЗМ изображения, как правило, содержат постоянную составляющую, которая не несет полезной информации о рельефе поверхности, а отражает точность подвода образца в середину динамического диапазона перемещений сканера по оси Z. Постоянная составляющая удаляется из СЗМ кадра программным способом.
- вычитание постоянного наклона
Изображения поверхности, получаемые с помощью зондовых микроскопов, как правило, имеют общий наклон. Это может быть обусловлено несколькими причинами. Во-первых, наклон может появляться вследствие неточной установки образца относительно зонда; во-вторых, он может быть связан с температурным дрейфом, который приводит к смещению зонда относительно образца; в-третьих, он может быть обусловлен нелинейностью перемещений пьезосканера. На отображение наклона тратится большой объем полезного пространства в СЗМ кадре, так что становятся не видны мелкие детали изображения. Для устранения данного недостатка производят операцию вычитания постоянного наклона. Для этого на первом этапе методом наименьших квадратов находится аппроксимирующая плоскость Р(1)(x,y), имеющая минимальные отклонения от рельефа поверхности Z=f(x,y). Затем производится вычитание данной плоскости из СЗМ изображения. Вычитание целесообразно выполнять различными способами в зависимости от природы наклона. Если наклон в СЗМ изображении обусловлен наклоном образца относительно оси зонда, то целесообразно произвести поворот плоскости на угол, соответствующий углу между нормалью к плоскости и осью Z; при этом координаты поверхности Z=f(x,y) преобразуются в соответствии с преобразованиями пространственного поворота. Однако при данном преобразовании возможно получение изображения поверхности в виде многозначной функции Z=f(x,y). Если наклон обусловлен термодрейфом, то процедура вычитания наклона сводится к вычитанию Z – координат плоскости из Z - координат СЗМ изображения.
Это позволяет сохранить правильные геометрические соотношения в плоскости X,Y между объектами в СЗМ изображении. В результате получается массив с меньшим диапазоном значений, и мелкие детали изображения будут отображаться большим количеством цветов, становясь более заметными.
На рисунке 11 представлен результат вычитания плоскости из реального АСМ изображения поверхности.

Рисунок 11. Вычитание наклонной плоскости [3]
- устранение искажений, связанных с неидеальностью сканера
Неидеальность свойств пьезосканера приводит к тому, что СЗМ изображение содержит ряд специфических искажений. Частично неидеальности сканера, такие как неравноправность прямого и обратного хода сканера (гистерезис), крип и нелинейность пьезокерамики компенсируются аппаратными средствами и выбором оптимальных режимов сканирования. Однако, несмотря на это, СЗМ изображения содержат искажения, которые трудно устранить на аппаратном уровне. В частности, поскольку движение сканера в плоскости образца влияет на положение зонда над поверхностью (по оси Z), СЗМ изображения представляют собой суперпозицию реального рельефа и некоторой поверхности второго (а часто и более высокого) порядка.
Для устранения искажений такого рода методом наименьших квадратов находится аппроксимирующая поверхность второго порядка P(2)(x,y), имеющая минимальные отклонения от исходной функции Z=f(x,y), и затем данная поверхность вычитается из исходного СЗМ изображения.


Рисунок 12. Вычитание поверхности 2-го порядка из АСМ изображения поверхности
На рисунке 12 представлен результат вычитания поверхности второго порядка из реального АСМ изображения поверхности.
Еще один тип искажений связан с нелинейностью и неортогональностью перемещений сканера в плоскости Х,У. Это приводит к искажению геометрических пропорций в различных частях СЗМ изображения поверхности. Для устранения таких искажений производят процедуру коррекции СЗМ изображений с помощью файла коэффициентов коррекции, который создается при сканировании конкретным сканером тестовых структур с хорошо известным рельефом.
Фильтрация СЗМ изображений
Шумы аппаратуры (в основном, это шумы высокочувствительных входных усилителей), нестабильности контакта зонд-образец при сканировании, внешние акустические шумы и вибрации приводят к тому, что СЗМ изображения, наряду с полезной информацией, имеют шумовую составляющую. Частично шумы СЗМ изображений могут быть удалены программными средствами.
- медианная фильтрация
Хорошие результаты при удалении высокочастотных случайных помех в СЗМ кадрах дает медианная фильтрация. Это нелинейный метод обработки изображений, суть которого можно пояснить следующим образом. Выбирается рабочее окно фильтра, состоящее из n×n точек (для определенности возьмем окно 3×3, т.е. содержащее 9 точек (рисунок 13)).

Рисунок 13. Принцип работы медианного фильтра с окном 3.3.
А – смещение окна в процессе фильтрации массива;
Б – расположение элементов в неотсортированном массиве;
В – расположение элементов в отсортированном массиве
В процессе фильтрации это окно перемещается по кадру от точки к точке, и производится следующая процедура. Значения амплитуды СЗМ изображения в точках данного окна выстраиваются по возрастанию, и значение, стоящее в центре отсортированного ряда, заносится в центральную точку окна. Затем окно сдвигается в следующую точку, и процедура сортировки повторяется. Таким образом, мощные случайные выбросы и провалы при такой сортировке всегда оказываются на краю сортируемого массива и не войдут в итоговое (отфильтрованное) изображение. Заметим, что при такой обработке по краям кадра остаются нефильтрованные области, которые отбрасываются в конечном изображении. На рисунке 14 представлен результат медианной фильтрации реального АСМ изображения поверхности.


Рисунок 14. Результаты медианной фильтрации с окном 5×5 АСМ изображения поверхности
- усреднение по строкам
Процесс сканирования поверхности в сканирующем зондовом микроскопе происходит таким образом, что частота регистрации информации в строке сильно (по крайней мере, в 100 раз) отличается от частоты регистрации строк. Это приводит к тому, что высокочастотные шумы содержатся, в основном, в строках СЗМ изображения, а низкочастотные шумы изменяют положение строк относительно друг друга. Кроме того, часто во время сканирования изменяется расстояние зонд-образец вследствие микродвижений в элементах конструкции измерительной головки микроскопа или вследствие изменения состояния рабочей части зонда (например, захвата кончиком зонда микрочастицы с поверхности и др.). Это приводит к тому, что на СЗМ изображении появляются ступеньки, параллельные направлению сканирования, связанные со смещением одной части СЗМ кадра относительно другой (рисунок 15 (а)). Избавиться от таких дефектов СЗМ изображений можно с помощью процедуры выравнивания кадра по строкам. В каждой строке сканирования находится среднее значение рельефа. А затем из значений в каждой строке кадра вычитаются соответствующие средние значения, так что в новом кадре в каждой строке среднее будет равно нулю. Это приводит к тому, что ступеньки, связанные с резкими изменениями среднего значения в строках, будут удалены из кадра. На рисунке 15 представлен результат выравнивания по строкам реального АСМ изображения поверхности.


Рисунок 15. АСМ изображения поверхности образца (а) — до усреднения по строкам; (б) — после усреднения
- Фурье - фильтрация СЗМ изображений
Одним из мощных методов коррекции СЗМ изображений является спектральная фильтрация на основе преобразований Фурье. Как известно, любая функция может быть представлена в виде интеграла Фурье. В случае СЗМ кадра преобразование Фурье производится над дискретными величинами.
На рисунке 16 показаны результаты Фурье - фильтрации одного из АСМ изображений реальной поверхности.

Рисунок 16. Пример применения Фурье-фильтрации к АСМ изображению поверхности (а) – исходное АСМ изображение, (в) – отфильтрованное изображение, (б) – спектр исходного изображения, (г) – обработка спектра фильтром низких частот [3]
Для устранения нежелательных эффектов, связанных с резким изменением спектральной функции на краю фильтра и на границах кадра, применяют фильтры с более сложной спектральной функцией. На основе Фурье-образа можно рассчитать ряд полезных характеристик поверхности.
Таким образом, стандартное программное обеспечение зондовых микроскопов включает в себя достаточно широкий набор средств по визуализации и обработке СЗМ данных. Кроме того, изображения, полученные на сканирующем зондовом микроскопе, могут быть сохранены в одном из графических форматов, что позволяет использовать дополнительные возможности, предоставляемые современными пакетами компьютерных программ по обработке и коррекции изображений.
Методы восстановления поверхности по ее СЗМ изображению
Одним из недостатков, присущих всем методам сканирующей зондовой микроскопии, является конечный размер рабочей части используемых зондов. Это приводит к существенному ухудшению пространственного разрешения микроскопов и значительным искажениям в СЗМ изображениях при сканировании поверхностей с неровностями рельефа, сравнимыми с характерными размерами рабочей части зонда.
Фактически получаемое в СЗМ изображение является "сверткой" зонда и исследуемой поверхности.
Частично данную проблему позволяют решить развитые в последнее время методы восстановления СЗМ изображений, основанные на компьютерной обработке СЗМ данных с учетом конкретной формы зондов [4,5]. Наиболее эффективным методом восстановления поверхности является метод численной деконволюции [5], использующий форму зонда, получаемую экспериментально при сканировании тестовых (с хорошо известным рельефом поверхности) структур. Восстановление исходного рельефа поверхности в данном методе производится путем обратного преобразования. Суть этого метода состоит в том, что СЗМ изображение поверхности повторно (но уже численно) сканируется инвертированным зондом.
Следует отметить, что полное восстановление поверхности образца возможно лишь при соблюдении двух условий: зонд в процессе сканирования коснулся всех точек поверхности, и в каждый момент зонд касался только одной точки поверхности. Если же зонд в процессе сканирования не может достигнуть некоторых участков поверхности (например, если образец имеет нависающие участки рельефа), то происходит лишь частичное восстановление рельефа. Причем, чем большего числа точек поверхности касался зонд при сканировании, тем достовернее можно реконструировать поверхность.

Рисунок 17. Моделирование процесса восстановления рельефа поверхности (а) – Исходная поверхность с включением в виде прямоугольного параллелепипеда; (б) – модельная форма зонда в виде параболоида вращения; (в) – результат свертки зонда и исходной поверхности; (г) – восстановленное изображение поверхности. (Размеры изображений по осям X, Y, Z указаны в относительных единицах) [3]
На практике при численной деконволюции СЗМ изображений используется условие минимальности расстояния между зондом и поверхностью при сканировании с постоянной средней высотой [4].
В этом случае за высоту рельефа поверхности в данной точке можно принять минимальное расстояние между точкой зонда и соответствующей точкой поверхности для данного положения зонда относительно поверхности.
Для калибровки и определения формы рабочей части зондов используются специальные тестовые структуры с известными параметрами рельефа поверхности. Виды наиболее распространенных тестовых структур и их характерные изображения, полученные с помощью атомно-силового микроскопа представлены на рисунках 18 и 19.
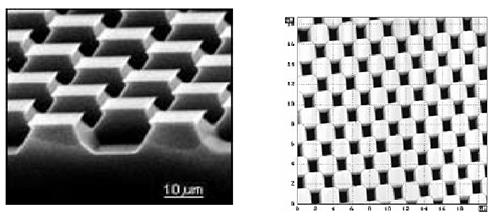
Рисунок 18. Прямоугольная калибровочная решетка и ее АСМ изображение [3]
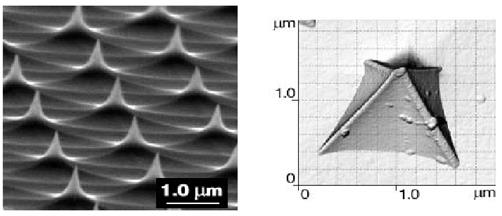
Рисунок 19. Калибровочная решетка в виде острых шипов и ее АСМ изображение с помощью зонда пирамидальной формы [3]
Калибровочная решетка в виде острых шипов позволяет хорошо прописывать кончик зонда, в то время как прямоугольная решетка помогает восстановить форму боковой поверхности. Комбинируя результаты сканирования данных решеток, можно полностью восстанавливать форму рабочей части зондов.








