 2020-01-15
2020-01-15 177
177Основу лабораторного комплекса микропроцессорный стенд SDK-1.1 на базе процессора ADuC812 или ADuC842.
Аппаратные блоки стенда:
§ вычислительное ядро на основе 8-разрядного процессора ADuC812 (ADuC842), FLASH-памяти и внешнего ОЗУ объемом до 512Кб. Процессорное ядро является клоном ядра Intel MCS51.
§ COM-порт для связи с ПК (интерфейс RS232C);
§ жидкокристаллический индикатор для вывода текста с поддержкой русского алфавита (2 строки по 16 символов);
§ программируемая логическая интегральная схема (ПЛИС) семейства MAX3000A фирмы Altera. В очень упрощенном виде ПЛИС представляет собой набор макроячеек и механизм для организации связи между ними. Микросхема EPM3064A содержит 64 макроячейки. В стенде SDK-1.1 MAX3064A используется как расширитель портов ввода-вывода. Микросхема MAX3064A подключена к внешней шине ADuC812
§ порт дискретного ввода-вывода, предназначенный для ввода и вывода информации, представленной в двоичном виде. Сигнал на входе или выходе дискретного порта может принимать значение логического нуля или единицы. В SDK-1.1 дискретные порты выведены на разъем J3. Эти порты можно использовать для подключения модулей SDX или каких- либо других внешних устройств. Кроме этого, к дискретным входам-выходам подключены DIP переключатели, позволяющие задавать фиксированные значения сигналов на входах.
§ аналоговый порт ввода на базе 8-миканального 12-тиразрядного АЦП;
§ аналоговый порт вывода на основе двух 12-тиразрядных ЦАП;
§ EEPROM-память емкостью 640 байт;
§ второй блок EEPROM-памяти емкостью до 32 Кб, подключенный к вычислителю через интерфейс I2C;
§ три 16-тиразрядных таймера-счетчика с внешними счетными входами (возможностью подачи сигналов через переключатели стенда) и блоком захвата/сравнения для измерения параметров и/или формирования дискретных сигналов;
§ сторожевой таймер;
§ линейку из 8 сигнальных светодиодов;
§ акустический пьезокерамический излучатель;
§ матричная клавиатура на 16 клавиш организована в виде матрицы 4x4. Доступ к колонкам и рядам организован как чтение/запись определенного байта внешней памяти (4 бита соответствуют 4 колонкам, другие 4 бита - рядам). При нажатии на кнопку, происходит изменение значения сигнала на входе соответствующего ряда с единицы на ноль
§ часы/календарь с возможностью подключения внешней батареи питания.
Распределение памяти
Стандартная для архитектуры 8051 структура внутренней памяти представлена четырьмя банками по 8 регистров общего назначения (диапазоны адресов 00h-07h, 08h-0Fh, 10h-17h, 18h-1Fh), битовым сегментом (20h-2Fh), свободным участком 30h-7Fh, областью размещения SFR (регистров специального назначения) 80h-FFh, доступной при прямой адресации, и свободной областью 80h-FFh, доступной при косвенной адресации.
Внешняя память SDK-1.1 разбита на следующие области: AduC812 Flash/EE, SRAM,MAX.
Flash/EE. Это область, в которой располагается таблица векторов прерываний и резидентный загрузчик файлов в формате HEX в память SRAM.
SRAM. Статическая память SRAM в SDK-1.1 имеет страничную организацию (максимум 8 страниц по 64 К) и условно разделяется на две области. Первая занимает младшие 64 Кбайт (страница 0) и доступна для выборки команд микроконтроллером ADuC812. Таким образом, программы могут располагаться только в этих младших 64 К адресного пространства. Остальные страницы доступны только для размещения данных. Для адресации ячейки памяти определенной страницы необходимо записать номер страницы в регистр специального назначения DPP ADuC812 (адрес 84h).
MAX. В младших адресах восьмой страницы адресного пространства (080000h- 080007h) располагается 8 ячеек-регистров ПЛИС MAX8064 (MAX8128). Эта область предназначена для взаимодействия с периферийными устройствами стенда.
Сопряжение с ПК
Сопряжение стенда с компьютером, необходимое для программирования микроконтроллера стенда и передачи данных между ПК и SDK, осуществляется с помощью последовательного порта (RS-232).
Требования к ПК:
· IBM-совместимый компьютер с наличием последовательного СОМ-порта.
· Операционная система: Windows 95/98/ME/2000/XP/Vista.
3. Описание технических средств для реализации проекта
Следует отметить, что основное внимание в данном курсовом проекте уделено разработке программного обеспечения для микропроцессорного учебного стенда SDK и ПК, а технологический процесс моделируется упрощенно с помощью имеющихся на стенде устройств.
Так, например, в качестве датчика толщинометра использован цифро-аналоговый преобразователь, замкнутый на аналого-цифровом преобразователе. На выходе ЦАП формируется напряжение ≈1.1 В, после преобразований в АЦП и передаче значения через последовательный порт в расчетах в программе на С++ используется значение ≈1, которое использовано в качестве толщины на входе клети. Для моделирования обоих импульсных датчиков угловой скорости используется клавиатура SDK: кнопка «1» прибавляет один импульс, кнопка «2» - десять импульсов, кнопка «3» - сто импульсов. Превышение заданного значения относительной деформации сигнализируется зажиганием нечетных светодиодов (через один), звуковым сигналом и выводом необходимой информации на дисплей, при этом выводится значение разности между текущим и заданным значением деформации. Передача данных между SDK и ПК осуществляется по последовательному COM-порту (RS-232). В качестве ПК используется IBM-совместимый компьютер с наличием последовательного СОМ-порта и операционной системой семейства Windows.
микропроцессорный контроллер деформация дрессировочный
4. Описание программных средств для реализации проекта
Для создания программы на языке C++ использовалась среда разработки Borland C++Builder 6, а также набор программ для компиляции и загрузки кода на языке Ассемблера в стенд SDK.
Для взаимодействия стенда с ПК и работы с интерфейсом RS-232 использована библиотека ComPortLirary 3.10.
Для создания, компиляции и загрузки в стенд кода используется следующий набор программ:
Ассемблер А51 преобразовывает исходный ассемблерный код в перемещаемый объектный модуль. Ассемблер А51 полностью поддерживает исходный код на языке Intel ASM-51. Ассемблер А51 поддерживает все микроконтроллеры семейства 8051. Набор регистров специального назначения (SFR) является стандартным. Вызов:
А51 sourcefile [directives] А51 @ commandfile
sourcefile Имя исходного файла на ассемблере.
commandfile Имя файла, содержащего командную строку ассемблера, включающую sourcefile и directives. Вы можете использовать командный файл для более простой компоновки исходного файла или в том случае, когда все директивы не помещаются в командной строке.
directives Параметры.
Загрузчик/компоновщик BL51 объединяет один или несколько объектных модулей в один исполняемый файл. Компоновщик также разрешает внешние и глобальные ссылки и назначает абсолютные адреса перемещаемым сегментам программ. Компоновщик автоматически выбирает подходящие библиотеки рабочих программ и связывает только нужные модули библиотек. Вызов:
BL51 inputlist [TO outputfile] [directives]
L51 inputlist [TO outputfile] [directives] BL51 @commandfile
L51 @commandfiIe
sourcefile Имя исходного объектного файла, созданного компилятором А51 или С.
commandfile Имя файла, содержащего командную строку компилятора, включая sourcefile и directives. Можно использовать командный файл для более простой компоновки исходного файла или в том случае, когда все директивы не помещаются в командной строке.
directives Параметры элементов управления.
Шестнадцатеричный конвертер ОН51 конвертирует объектные модули в абсолютных адресах в шестнадцатеричные файлы в формате Intel. Модули перед этим создаются с помощью компоновщика BL51 или конвертера ОС51.
ОН51 absfile |HEXFILE (hexfile)
absfile Имя объектного модуля, построенного в абсолютных адресах.
hexfile Имя шестнадцатеричного файла в формате Intel, который должен быть создан.
Для загрузки программы в МК используется загрузчик T2.
5. Программа для работы микропроцессорного контроллера на языке ассемблер
DPPDATA84h; адрес указателя страницы данных (data; page ponter)
ADCCON1 DATA0EFH; регистр управления АЦП
ADCCON2 DATA 0D8H; регистр управления АЦП
ADCCON3 DATA 0F5H; регистр управления АЦП
ADCDATALDATA 0xD9; регистр младшего байта оцифрованных; данных АЦП
ADCDATAH DATA0xDA; регистр старшего байта оцифрованных данных; АЦП
DACCON DATA0xFD; регистр управления ЦАП
DAC0L DATA0xF9; младший регистр данных ЦАП содержат
DAC0H DATA0xFA; старший регистр данных ЦАП содержат
PLLCONDATA0D7H; регистр управления частотой контроллера
TIMECONDATA0A1H; адрес счетчика временных интервалов
T3FD DATA0x9D; регистры настройки Таймера 3
T3CON DATA0x9E; регистр управления таймером 3
ORG0000h; начало области, в которой будет располагаться код
JMPSTART; переход на инициализацию системы
ORG0023H; вектор прерывания от последовательного порта (UART)
JMPPOSL_PORT; переход на подпрограмму обработки прерывания
START:
MOVPLLCON,#3; настраиваем частоту ядра
MOVTMOD,#00H; T/C0 -таймер, режим0
MOVT3CON,#83H; устанавливаем скорость
MOVT3FD,#2DH; передачи – 9600 бод
MOVSCON,#50H; настройка последовательного порта; 0101 0000 (01 - 8-битный режим, 01 - режим 0, прием разрешен, 00 - биты используемые в режимах 1 и 2, 0 - флаг передачи; последов. порта, устанавливается; аппаратно после передачи 8-го бита, д.б. сброшен программно, 0 - флаг приема; последов порта, установливается аппаратно после приема 8-го бита, д.б. сброшен; программно)
MOVIE,#00010000B; разрешение прерывания от UART
SETBEA; разрешение прерываний
MAIN:; основная программа
CLRF0;
MOVR3,#0;
SCAN:; сканирование и проверка регистра R3;
K0:
CJNER3, #2,K1; если R3=2, то
CALLDAC_ADC; перейти на подпрограмму ЦАП-АЦП,
MOVR3,#0; затем записать в R3 0; иначе перейти на метку К1
K1:
CJNER3,#1, SCAN; если R3=1, то дальше сканировать клавиши 1,2 и 3, в портивном случае перейти на метку SCAN;
MOV R5,#0FEH;
MOV R7,#00H; нам нужен 0-й байт 8-й страницы 08"00"00"Н
MOV R6,#00H; 08"00"00
CALLWRITE;
CALLCHECK123;
CJNE A,#00H,K2; если клавиша 1 не нажата, сканировать клавишу 2
CALLWAIT_CHECK1; проверка на "залипание" клавиши 1
MOVSBUF,#01111000b; записываем в буфер значение символа;"x", бит TI устанавливается в 1,; инициируя прерывание по посл. порту
CALL DELAY; задержка
K2:; проверка нажатия клавиши 2
MOVR5,#0FDH;
MOV R7,#00H; нам нужен 0-й байт 8-й страницы 08"00"00"Н
MOV R6,#00H; 08"00"00
CALLWRITE;
CALLCHECK123;
CJNE A,#00H,K3; если клавиша 2 не нажата, сканировать клавишу 3
CALLWAIT_CHECK2; проверка на "залипание" клавиши 2
MOVSBUF,#01111001b; записываем в буфер значение символа; "y", бит TI устанавливается в 1,; инициируя прерывание по посл. порту
CALL DELAY; задержка
K3:; проверка нажатия клавиши 3
MOVR5,#0FBH;
MOV R7,#00H; нам нужен 0-й байт 8-й страницы 08"00"00"Н
MOV R6,#00H; 08"00"00
CALLWRITE;
CALLCHECK123;
CJNE A,#00H,SCAN; если клавиша 3 не нажата, перейти на; метку SCAN
CALLWAIT_CHECK3; проверка на "залипание" клавиши 2
MOVSBUF,#01111010b; записываем в буфер значение символа; "z", бит TI устанавливается в 1,; инициируя прерывание по посл. порту
CALLDELAY; задержка
JMP SCAN; переход на метку SCAN
CHECK123:; функция определения, нажата ли клавиша (1,2 или 3)
CALL READ; читаем байт по адресу 080000Н
ANLA,#10H
RET
WAIT_CHECK1:
CALL READ;
CJNE A,#0FEH,WAIT_CHECK1; ждать, если клавиша 1 зажата
RET
WAIT_CHECK2:
CALL READ;
CJNE A,#0FDH,WAIT_CHECK2; ждать, если клавиша 2 зажата
RET
WAIT_CHECK3:
CALL READ;
CJNE A,#0FBH,WAIT_CHECK3; ждать, если клавиша 3 зажата
RET
BUZZ:; Для управления динамиком в процедуре использованы таймер и регистр ПЛИС ENA (адрес;080004h).;2-4 биты регистр ENA управляют величиной напряжения на динамике, т.е. позволяют; задавать громкость звука.;Для формирования звука генерируются прямоугольные импульсы с заданным периодом.
MOVPLLCON,#5;
MOVR1,#255; задаем продолжительность сигнала
MOVR2,#5;
AGAIN:
CLRTR0; выключаем таймер
MOVTH0,#00H;инициализация таймера
MOVTL0,#00H;
SETBTR0; включаем таймер
MOVR5,#010H; записываемое число в регистр DPTR,
;соответствует высокому уровню напряжения
MOVR7,#04H; нам нужен 4-й байт 8-й страницы 0800"04"Н
MOVR6,#00H; 08"00"04
REP1:
CALLWRITE; включаем сигнал
JNBTF0,REP1; удерживаем значение в течение полупериода
CLRTR0; выключаем таймер
MOVTH0,#00H; инициализация таймера
MOVTL0,#00H;
SETBTR0; включаем таймер
MOVR5,#08H; записываемое число в регистр DPTR,; соответствует низкому уровню напряжения
MOVR7,#04H; нам нужен 4-й байт 8-й страницы 08"00"04"Н
MOVR6,#00H; 08"00"04
REP2:
CALLWRITE; Выключаем сигнал, 0-е напряжение
JNBTF0,REP2; удерживаем значение в течение полупериода
CLRTR0; выключаем таймер
DJNZR1,AGAIN;
DJNZR2,AGAIN;
MOVPLLCON,#3;
RET;
LCD_Putch:; вывод символа на дисплей, код которого
;передается через регистр R5
MOVR7,#01H; DATA_IND (080001H)
MOVR6,#00H;
CALLWRITE; устанавливаем данные на шине данных ЖКИ
MOVR5,#05H; 0-й бит C_IND отвечает за строб, 1-й бит –
;запись/чтение, 2-й бит за данные/команды, 05H=0000 0101B - запись данных и;установка строба
CALLSTROBE; строб
RET;
STROBE:; подача сигнала Е интерфеса ПЛИС <-> ЖКИ на; время не менее 500 нс, одновременно подается; сигнал R/W=0 запись, RS=1 - данные
MOVR7,#06H; C_IND (080006H)
MOVR6,#00H;
CALLWRITE; установка строба
MOVR5,#0FEH
MOVR7,#06H; C_IND (080006H)
MOVR6,#00H;
CALLWRITE; сброс строба
CALLDELAY; задержка на время исполнения команды
RET;
DELAY:; процедура задержки
MOVR0,#100;
L1:
MOVR1,#100;
L2:
DJNZR1,L2;
DJNZR0,L1;
RET;
CLEAR:; очистка дисплея
MOVR5,#01H;
MOVR7,#01H; DATA_IND (080001H)
MOVR6,#00H;
CALLWRITE; устанавливаем данные на шине данных ЖКИ
MOVR5,#01H; команда очистки дисплея
CALLSTROBE; строб
MOVR7,#07H; нам нужен 7-й байт 8-й страницы 0800"07"Н
MOVR6,#00H; 08"00"07
MOVR5,#00000000B; инициализация светодиодов через один
CALLWRITE;
CLRF0;
RET;
POSL_PORT:; наступило прерывание, бит TI или RI равен 1
JBRI,WAIT_IN; если бит RI - принимаем данные
JBTI,WAIT_OUT; если бит TI - пересылаем данные
WAIT_IN:
CLRRI; сбрасываем флаг
MOVR5,SBUF; записываем в буфер значение R5
CJNER5,#61H,E1; если пришел символ 'a', то
MOVR3,#1; записать в R3 1
JMPE; переход на метку Е
E1:
CJNER5,#70H,E2; если пришел символ 'р', то
MOVR3,#2; записать в R3 2
JMPE; переход на метку Е
E2:
CJNER5,#73H,E3; если пришел символ 's', то
CALLCLEAR; очистить дисплей и погасить светодиоды
JMPE; переход на метку Е
E3:; если не пришел ни символ 'a', ни 'p', ни 's', то
MOVA,R5; это означает, что последовательно начали передаваться
MOVR4,A; значения, составляющие разность между текущим и заданным значениями деформаций
JBF0,E3a; если бит F0=0, тогда однократный
CALLSTOP; вывод информации: "Деформация Превышение: %"
E3a:
SETBF0;
CALLLCD_NA; вывод символов, определяющих отклонение от; заданной деформации
E:
RETI;
WAIT_OUT:; подпрограмма пересылки значения в послед. порт
CLR TI;
RETI;
DAC_ADC:
CALLDELAY;
MOVDACCON,#01101101B; настройка регистра ЦАП; 0-12 битный режим,; 11-бит выбора диапазона, 0-Vdd(в); 01-выход ЦАП1=0 в, выход ЦАП0-; соответствует коду; 1-выходы ЦАПов изменяются сразу, как; только данные попадают в регистры; 01-ЦАП1 выключен, ЦАП0 включен
MOVADCCON1,#10101100B;10-дежурный режим, если не выполняется; преобразование; 10-коэф. деления тактовой частоты на 4; 11-число тактов задержки=4; 0-Бит запуска преобразования от Таймера 2; 0-бит разрешения внешнего запуска АЦП
MOVDAC0H,#00000011B;переслать значение в старший байт ЦАП
MOVDAC0L,#10000100B;переслать значение в мл. байт; (т.е. 1.1/5*4095 = 909, т.е. 00000011 10000100)
MOVADCCON2,#00010000B;SCONV=1-Бит однократного преобразования; После того, как цикл завершился, бит; автоматически сбрасывается в 0
ADC_WAIT:
MOVA,ADCCON3;
JBACC.7,ADC_WAIT;Флаг занятости ЦАП (только для чтения).; Устанавливается аппаратно на; время цикла преобразования или; калибровки. Автоматически сбрасывается; ядром в конце преобразования или; калибровки.
MOV A, ADCDATAH; записать данные из старшего регистра АЦП в А
ANL A,#00001111B;стереть код канала АЦП, хранящегося; в старшем байте
MOV SBUF, A; переслать значение
CALL DELAY; задержка
MOV A,ADCDATAL; записать данные из младшего регистра АЦП в А
MOV SBUF, A; переслать значение
CALL DELAY; задержка
RET;
STOP:; подпрограмма окончания процесса
MOV R5,#11100000B; Д
CALLLCD_Putch;
MOV R5,#01100101B; е
CALLLCD_Putch;
MOV R5,#11100100B; ф
CALLLCD_Putch;
MOV R5,#01101111B; о
CALLLCD_Putch;
MOV R5,#01110000B; р
CALL LCD_Putch;
MOV R5,#10111100B; м
CALLLCD_Putch;
MOV R5,#01100001B; а
CALLLCD_Putch;
MOVR5,#11100101B; ц
CALLLCD_Putch;
MOVR5,#10111000B; и
CALLLCD_Putch;
MOVR5,#11000111B; я
CALLLCD_Putch;
MOVR5,#0C0H; сдвиг курсора на следующую строку
MOVR7,#01H; DATA_IND (080001H)
MOVR6,#00H;
CALLWRITE; устанавливаем данные на шине данных ЖКИ
MOVR5,#01H; команда очистки дисплея
CALLSTROBE; строб
MOVR5,#10101000B; П
CALLLCD_Putch;
MOVR5,#01110000B; р
CALLLCD_Putch;
MOVR5,#01100101B; е
CALLLCD_Putch;
MOVR5,#10110011B; в
CALLLCD_Putch;
MOVR5,#11000011B; ы
CALLLCD_Putch;
MOVR5,#11000001B; ш
CALLLCD_Putch;
MOVR5,#01100101B; е
CALLLCD_Putch;
MOVR5,#10111101B; н
CALLLCD_Putch;
MOVR5,#10111000B; и
CALLLCD_Putch;
MOVR5,#01100101B; е
CALLLCD_Putch;
MOVR5,#00111010B;:
CALLLCD_Putch;
MOVR5,#0CFH;; установка крайнего правого положения во второй строке ЖКИ
MOVR7,#01H; DATA_IND (080001H)
MOVR6,#00H;
CALLWRITE; устанавливаем данные на шине данных ЖКИ
MOVR5,#01H; команда очистки дисплея
CALLSTROBE; строб
MOVR5,#00100101B; %
CALLLCD_Putch;
MOVR5,#0CBH;установка положения после ':' во второй строке ЖКИ
MOVR7,#01H; DATA_IND (080001H)
MOVR6,#00H;
CALLWRITE; устанавливаем данные на шине данных ЖКИ
MOVR5,#01H; команда очистки дисплея
CALLSTROBE; строб
MOVR7,#07H; нам нужен 7-й байт 8-й страницы 0800"07"Н
MOVR6,#00H; 08"00"07
MOVR5,#10101010B; инициализация светодиодов через один
CALLWRITE;
CALL BUZZ; звуковой сигнал
RET;
LCD_NA:; вывод символов на дисплей, составляющий отклонение текущей деформации от заданного значения
MOVR7,#01H; DATA_IND (080001H)
MOVR6,#00H;
MOVA,R4;
MOVR5,A;
CALLWRITE; устанавливаем данные на шине данных ЖКИ
MOVR5,#05H; 0-й бит C_IND отвечает за строб, 1-й бит –; запись/чтение, 2-й бит за данные/команды,; 05H=0000 0101B - запись данных и;; установка строба
CALLSTROBE; строб
RET;
WRITE:; запись значения по адресу передаваемому в;R6 и R7, записываемое значение находится в R5
MOV DPL,R7; загружаем адрес в младший байт DPTR
MOV DPH,R6; загружаем адрес в старший байт DPTR
MOV R7,DPP; временно сохраним содержимое dpp в R7
MOV DPP,#08H; переключаемся на 8-ю страницу - 080007Н
MOV A,R5;
MOVX@DPTR,A; записываем значение
MOV DPP,R7; возвращаем страницу
RET;
READ:; чтение значения по адресу передаваемому в; регистрах R6 и R7, прочитанное значение записываем в А
MOV DPL,R7; загружаем адрес в младший байт DPTR
MOV DPH,R6; загружаем адрес в старший байт DPTR
MOV R7,DPP; временно сохраним содержимое dpp в R7
MOV DPP,#08H; переключаемся на 8-ю страницу - 080007Н
MOVX A,@DPTR; пересылаем в аккумулятор значение ячейки
MOV DPP,R7; возвращаем страницу
RET;
END.
6. Программа для персонального компьютера на языке с++ в среде Borland C++Builder 6
//--------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include <iomanip>
#include "Kursovik.h"
//--------------------------------------------------------------
#pragma package(smart_init)
#pragma link "CPort"
#pragma link "CPortCtl"
#pragma resource "*.dfm"
TForm1 *Form1;
int connect=0, N_vhod=0, N_vyhod=0, vhod=0, vyhod=0, process=0, ADC_H=0, ADC_L=0, v_vhod=15, P=50;
float ADC, e, h2, delta_e, zad_e=3, v_vyhod=0;
AnsiString Str,delta_es;
//--------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
}
//--------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
if (connect==1)
{
zad_e=StrToFloat(Edit6->Text); //считывание заданного значения деформации
process=1; //переменная, отвечающая за начало процесса подсчтеа и анализа параметров
vhod=0; //переменная, отвечающая за формирование входных импульсов
vyhod=0; //переменная, отвечающая за формирование выходных импульсов
ComPort1->WriteStr('p'); //отправляем символ 'p'
ComPort1->ClearBuffer(true,true); //очистка буфера
}
}
//--------------------------------------------------------------
void __fastcall TForm1::ComPort1RxChar(TObject *Sender, int Count)
{
ComPort1->ReadStr(Str,1); //читаем полученные данные
ComPort1->ClearBuffer(true,true); // записываем в Str
if (vhod==1)
{
if (Str == 'x') {N_vhod=N_vhod+1; Edit1->Text=N_vhod;}
else if (Str == 'y') {N_vhod=N_vhod+10; Edit1->Text=N_vhod;}
else if (Str == 'z') {N_vhod=N_vhod+100; Edit1->Text=N_vhod;}
}
else if (vyhod==1)
{
if (Str == 'x') {N_vyhod=N_vyhod+1; Edit2->Text=N_vyhod;}
else if (Str == 'y') {N_vyhod=N_vyhod+10; Edit2->Text=N_vyhod;}
else if (Str == 'z') {N_vyhod=N_vyhod+100; Edit2->Text=N_vyhod;}
}
if (process == 1)
{
if (ADC_H == 0) ADC_H = Str[1];
else
{
ADC_L = Str[1];
if (ADC_L<0) ADC_L=255+ADC_L;
ADC=(float)(ADC_H<<8|ADC_L)*5/4095; //Данные с АЦП используются как толщина на входе
if (N_vhod!=0 && N_vyhod>=N_vhod) //Проверка корректности данных по импульсам (количество импульсов на входе < кол-ва импульсов на выходе)
{
Edit3->Text=ADC; //Выводим толщину на входе
e=(float)(N_vyhod-N_vhod)/N_vhod*100; //Расчет текущего значения относительной деформации
Edit5->Text=e; //Выводим текущее значение относительной деформации
h2=ADC-e*ADC/100; //Расчет толщины на выходе
Edit4->Text=h2; //Выводим толщину на выходе
Edit7->Text=v_vhod; //Выводим скорость на входе
v_vyhod=(float)v_vhod*ADC/h2; //Расчет скорости на выходе
Edit8->Text=v_vyhod; //Выводим скорость на выходе
Edit9->Text=P; //Выводим усилие обжатия
ADC_H = 0;
ADC_L = 0;
process=0;
}
else Label5->Visible=true; //Если данные некорректны, вывод необходимой информацию
}
}
if (e>zad_e) //Если текущее значение деформации больше заданного,то
{
delta_e=e-zad_e; //вычисляем разность между текущим значением и заданным
delta_es=(AnsiString)delta_e; //Преобразуем данную разность в строку
ComPort1->WriteStr(delta_es[1]);ComPort1->ClearBuffer(true,true); //и отправляем первый байт разности
Sleep(1000);
ComPort1->WriteStr(delta_es[2]);ComPort1->ClearBuffer(true,true); //отправляем второй байт разности
Sleep(500);
ComPort1->WriteStr(delta_es[3]);ComPort1->ClearBuffer(true,true); //отправляем третий байт разности
Sleep(500);
ComPort1->WriteStr(delta_es[4]);ComPort1->ClearBuffer(true,true); //отправляем четвертый байт разности
e=0;
}
}
//--------------------------------------------------------------
void __fastcall TForm1::Button2Click(TObject *Sender)
{
if (connect==1)
{
ComPort1->WriteStr('s');
ComPort1->ClearBuffer(true,true); //Очистка буфера
ComPort1->Connected=false; //Завершение соединения
ComPort1->Close(); //Закрытие порта
connect=0;
Edit1->Text=0;
Edit2->Text=0;
Edit3->Text=0;
Edit4->Text=0;
Edit5->Text=0;
Edit6->Text=0;
Edit7->Text=0;
Edit8->Text=0;
Edit9->Text=0;
N_vhod=0;
N_vyhod=0;
vhod=0;
vyhod=0;
process=0;
v_vyhod=0;
ADC_H=0;
ADC_L=0;
Edit6->Text=zad_e;
}
}
//--------------------------------------------------------------
void __fastcall TForm1::Button4Click(TObject *Sender)
{
Edit6->Text=zad_e; //Вывод заданного значения деформации
ComPort1->Open(); //Открытие порта
ComPort1->Connected=true; //Установление соединения
connect=1;
}
//--------------------------------------------------------------
void __fastcall TForm1::Button5Click(TObject *Sender)
{
if (connect==1)
{
process=0;
vhod=1;
vyhod=0;
Label5->Visible=false;
ComPort1->WriteStr('a');
ComPort1->ClearBuffer(true,true);
}
}
//--------------------------------------------------------------
void __fastcall TForm1::Button7Click(TObject *Sender)
{
if (connect==1)
{
process=0;
vyhod=1;
vhod=0;
Label5->Visible=false;
ComPort1->WriteStr('a');
ComPort1->ClearBuffer(true,true);
}
}
//--------------------------------------------------------------
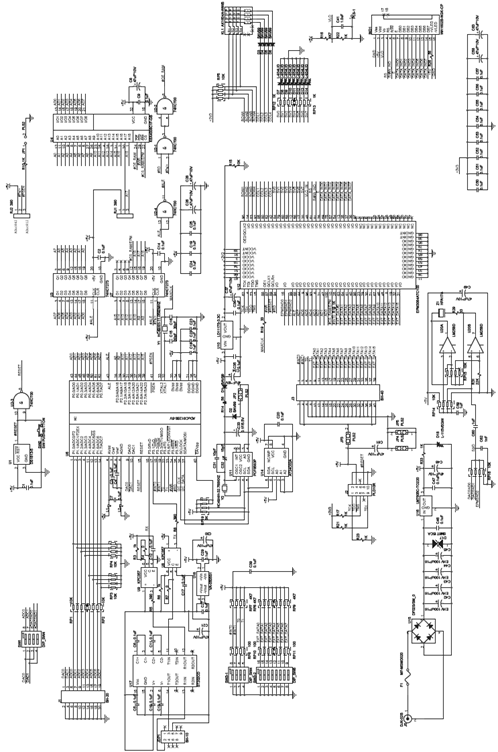
7. Графическая часть
А. Электрическая принципиальная схема микропроцессорной системы
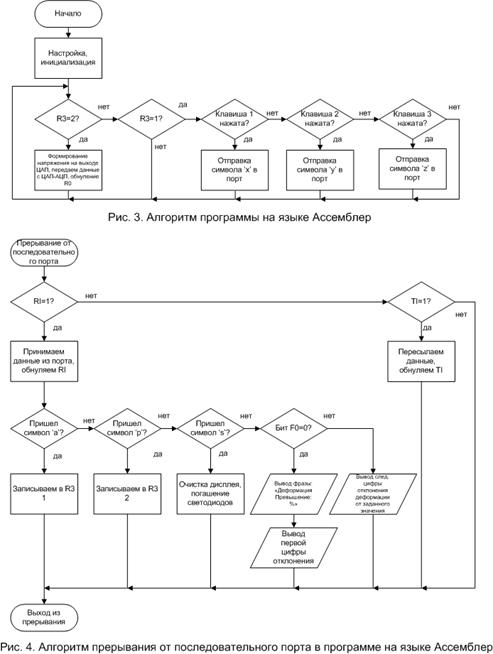
Б. Алгоритмы работы системы

В. Окно программы для персонального компьютера

В окне программы имеются поля для вывода рассчитанных и необходимых для расчетов параметров, имеется поле для ввода необходимого значения относительной деформации. Кнопка “ЗАПУСК” открывает COM-порт, моделируя, таким образом, начало технологического процесса. После нажатия на кнопку “Начать счет” какой-либо панели (“Импульсы на входе” или “Импульсы на выходе”) можно моделировать кнопками стенда SDK количество импульсов, пришедших с импульсных датчиков (кнопка 1 – 1 импульс, кнопка 2 – 10 импульсов, кнопка 3 – 100 импульсов). При нажатии на “ПРОЦЕСС” приходят данные со стенда после преобразования ЦАП-АЦП, рассчитываются все имеющиеся параметры и выводятся в соответствующие поля. Кнопка “СТОП” моделирует окончание процесса (закрывается последовательный порт), при ее нажатии обнуляются переменные и поля для вывода.
Заключение
Задача на курсовой проект состояла в проектировании микропроцессорной системы, обеспечивающей измерение относительной деформации полосы на дрессировочном стане. Для моделирования условий технологического процесса был использован стенд SDK, для которого была написана и загружена в него программа на языке Ассемблера. Взаимодействие с ПК организовано посредством COM-порта, через который передаются необходимые данные для анализа параметров процесса, а также управляющие сигналы. Расчет необходимых параметров, а толщина, скорость полосы на выходе, относительная деформация полосы проводится при использовании программы, написанной на языке С++.
Таким образом, по полученным результатам работы можно сделать вывод об успешном выполнении задания курсового проекта.
СПИСОК литературЫ
1. Джонсон Б., Скибо К., Янг М. Основы Visual studio.NET 2003 / пер. с англ. – Издательско-торговый дом "Русская редакция", 2003 – 464 с: ил.
2. Павловская Т.А. С/С++. Программирование на языке высокого уровня – СПб.: Питер, 2003 – 461 с: ил.
3. Павловская Т.А., Щупак Ю.А. C++. Объектно-ориентированное программирование: Практикум. – СПб.: Питер, 2006. – 265 с: ил.
4. Харахнин К.А. Основы проектирования микропроцессорных устройств автоматики на однокристальных микроконтроллерах: Учебное пособие. – Череповец: ЧГУ, 2007. – 234 с.
5. Техническая документация на SDK1.








