2020-01-14
2020-01-14 127
127
 Ом
Ом
следовательно, требуется ПИ-регулятор тока возбуждения.
|
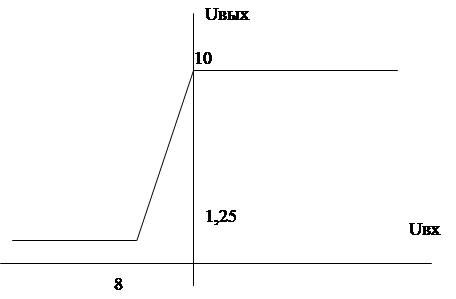
Рис.2. Характеристика задающего звена.
На вход звена, изображённого на рис. 2 приходит сигнал рассогласования (Uze-Eя).
При 
 , (Uze-Eя)>0 и на выходе нелинейного элемента идёт задание на номинальный ток возбуждения. При
, (Uze-Eя)>0 и на выходе нелинейного элемента идёт задание на номинальный ток возбуждения. При  , (Uze-Eя)<0 и Uztv уменьшается в зависимости от Eя. Так как ток возбуждения уменьшается, то и магнитный поток обмотки возбуждения уменьшается, а следовательно скорость увеличивается.
, (Uze-Eя)<0 и Uztv уменьшается в зависимости от Eя. Так как ток возбуждения уменьшается, то и магнитный поток обмотки возбуждения уменьшается, а следовательно скорость увеличивается.
Выбор элементов контура тока якоря.
В качестве датчика тока якоря выбираем ДТХ–50. На вход этого датчика можно подавать  . При этом он выдаёт на выходе
. При этом он выдаёт на выходе  .
.
Так как  и является максимальным значением, то при
и является максимальным значением, то при  мы имеем
мы имеем  .
.
Тогда
 .
.
Изобразим ПИ–РТЯ.
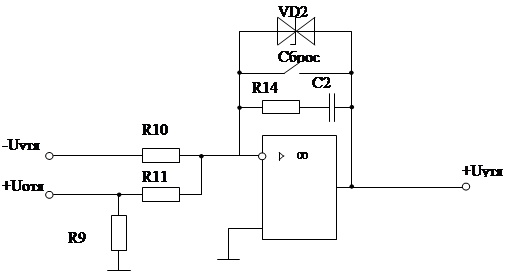 |
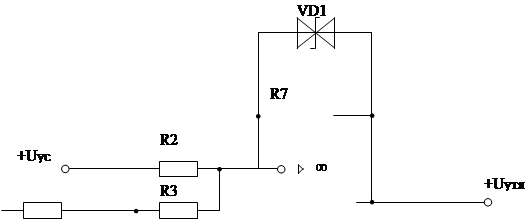
Рис.9. Принципиальная схема ПИ–РТЯ.
В качестве ОУ выбираем прецизионный ОУ типа КР140УД17А [3].
Он имеет следующие параметры:

В начальное значение времени необходимо обнулить интеграторы. Для этого будим использовать аналоговый ключ типа КР590КН2, который содержит в себе два ключа. Пусть
 , тогда
, тогда
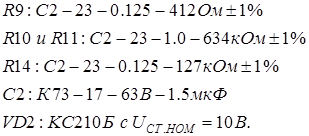
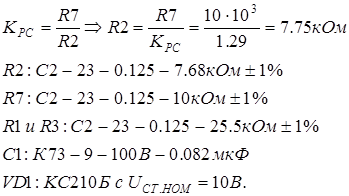
Используя [3] выбираем резисторы, конденсатор и стабилитрон, а также пользуясь стандартным рядом Е96.
Выбор элементов контура скорости.
Двигатель 4ПФ112L поставляется со встроенным тахогенератором типа ТП80-20-0.2.
Его параметры:
Крутизна выходной характеристики  .
.
Номинальная скорость вращения  .
.
Максимальная скорость вращения  .
.
В нашем случае при  напряжение на выходе тахогенератора:
напряжение на выходе тахогенератора:
 .
.

Изобразим принципиальную схему П-РС.
 | |||||||
| |||||||
 | |||||||
 | |||||||
 | |||||||||
 | |||||||||
| |||||||||
 |  | ||||||||
Рис.10. Принципиальная схема П–РС
Нам нужно получить  . Для этого мы поменяем полярность тахогенератора и поставим делитель напряжения на резисторах
. Для этого мы поменяем полярность тахогенератора и поставим делитель напряжения на резисторах 
П–РС реализуем на ОУ типа КР140УД17А.
Пусть  , тогда
, тогда
Выбор элементов ПИ-РТВ.
Изобразим ПИ-РТВ.
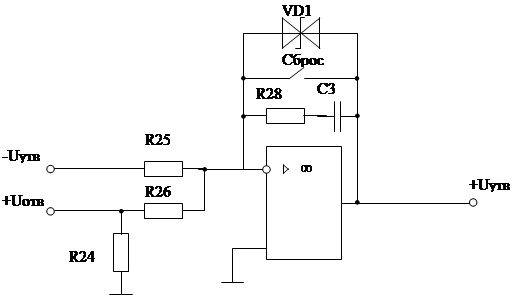 |
Рис.11. Принципиальная схема ПИ–РТВ.
В качестве датчика тока возбуждения выбираем датчик тока ДТХ–25, принцип действия которого основан на эффекте Холла.
При  (номинальные значения).
(номинальные значения).
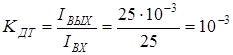
У нас  . При этом мы должны получить
. При этом мы должны получить  .
.
 .
.
Для ПИ-РТВ используем ОУ типа КР140УД17А. Выбираем  .
.
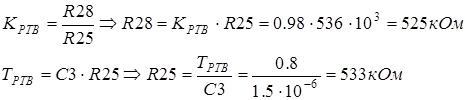
Выбираем: