 2020-01-14
2020-01-14 210
210
В рассматриваемых РТМС сокращение избыточности достигается за счет установления на некотором отрезке времени для каждого параметра или группы параметров своей частоты опроса. Установка частоты опроса  осуществляется по известным максимальным характеристикам параметров: граничной частоты спектра, минимальным интервалом корреляции и максимальной скорости изменения параметра. Для программного изменения частоты опроса должны быть известны указанные априорные сведения. На рисунке 4 показано, что на интервалах
осуществляется по известным максимальным характеристикам параметров: граничной частоты спектра, минимальным интервалом корреляции и максимальной скорости изменения параметра. Для программного изменения частоты опроса должны быть известны указанные априорные сведения. На рисунке 4 показано, что на интервалах  частота опроса меняется дискретно.
частота опроса меняется дискретно.
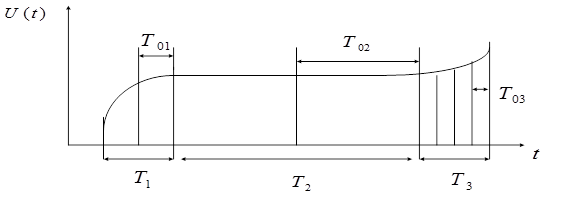
Рисунок 4
Скачкообразное изменение частоты опроса позволяет сократить избыточность, сохраняя заданное значение погрешности дискретизации.
Структурная схема передающей части программируемой РТМС представлена на рисунке 5, где Д – датчики, К – коммутатор, РПУ – радиопередающее устройство, УУ+ЗУ – устройство управления и запоминающее устройство.

Рисунок 5
Управляющие сигналы поступают на вход коммутатора, кодирующего устройства и передатчика, изменяя их характеристики. Программа управления хранится в ЗУ и обновляется по внешним командам.
Недостатки программируемых РТМС:
1. Необходимость наличия априорных сведений об измеряемых параметрах.
2. Дискретное изменение частоты опроса, ведущее к некоторой избыточности.
Достоинства программируемых РТМС:
1. Простота реализации и высокая информационная гибкость.
2. Сокращение объема передаваемых данных за счет сокращения избыточности по множеству параметров.
Глава 3. Адаптивные методы сжатия








