 2020-01-14
2020-01-14 315
315Проектирование систем электропривода обычно производится от простого к сложному. Прежде всего, на основе требований к электроприводу, изложенных в задании, необходимо:
- выбрать тип тиристорного преобразователя;
- рассмотреть возможность использования разомкнутой системы ЭП;
в случае необходимости использования замкнутой системы ЭП нужно определить, по какому параметру должна осуществляться обратная связь.
Выбор структуры системы электропривода
Задача САУ ЭП машин состоит в соблюдении заданного режима работы в соответствии с требованиями технологического процесса. Управление электроприводами включает пуск, торможение, реверсирование, а также регулирование скорости, ускорения или других заданных параметров привода.
Системы автоматического управления электроприводами можно подразделить на разомкнутые и замкнутые.
В разомкнутых САУ не предусматриваются автоматические устройства для изменения и регулирования скорости ЭД и других выходных величин. Поэтому изменение возмущающих воздействий, например нагрузки на валу двигателя, приводит к изменению ранее заданного режима работы привода. Они обеспечивают автоматический разгон, торможение, реверсирование и ступенчатое изменение скорости привода. Разомкнутые САУ строятся на базе релейно-контакторной аппаратуры, основные элементы которой – различного рода реле, контакторы, выключатели и др.
В замкнутых САУ предусматриваются автоматические устройства измерения и регулирования скорости, тока и других выходных величин. В этих системах можно независимо от состояния возмущающих воздействий поддерживать заданный режим работы привода или изменять скорость, ускорение и ток по требуемому закону. Для этой цели применяются электромагнитные, магнитные или полупроводниковые усилители. Замкнутые САУ сложнее и дороже разомкнутых, однако они более совершенны, так как позволяют наиболее точно соблюдать заданный технологический режим работы.
Проектирование систем электропривода обычно проводится от простого к сложному. Прежде всего, необходимо на основе требований к электроприводу, изложенных в техническом задании, рассмотреть возможность использования разомкнутой (без внешних обратных связей) системы автоматического управления электроприводом. Для этого необходимо определить перепад частоты вращения двигателя Δn при М=Мс и сравнить его с заданным значением Δnзад. Если Δn≤ Δnзад можно использовать разомкнутую САУ ЭП, если Δn>Δnзад необходимо использовать замкнутую САУ ЭП по скорости. В данной работе:
Δn>Δnзад (38>35)
Следовательно и необходимо использовать замкнутую систему электропривода по скорости.
Описание выбранной САУ ЭП
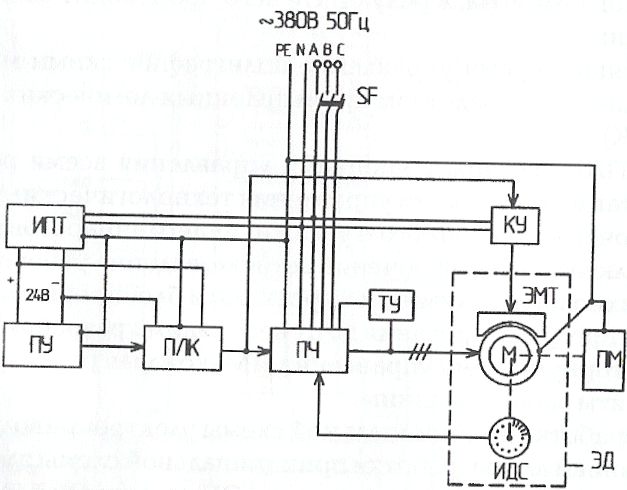
Рис.5.2.1 Функциональная схема САУ ЭП
SF – автоматический выключатель;
ИПТ – стабилизированный источник постоянного тока;
ПЛК – программируемый логический контроллер;
ПЧ – преобразователь частоты;
ТУ – тормозное устройство (прерыватель с тормозным резистором);
КУ – коммутационное устройство;
ЭМТ – электромеханический тормоз;
ИДС – импульсный датчик скорости;
ПМ – полиграфическая машина;
ЭД – асинхронный двигатель с к.з.р. с встроенным ЭМТ и ИДС;
ПУ – пульт управления ПМ.








