 2020-01-14
2020-01-14 189
189Определим неизменяемую часть контура регулирования:
1.Определение передаточной функции исполнительного механизма
Производим аналогично тому, как это производилось в контуре регулирования давления “ледяной воды”:
исполнительный механизм можно представить реальным интегрирующим звеном с передаточной функцией:
W(s) = 1/s ×Тим (14)
где, Тим - постоянная времени исполнительного механизма постоянной скорости, время полного хода (расчётное время полного перемещения ИМ) которое по паспарту равно Тим = 400с.
2.Определим передаточную функцию аммиачного компрессора.
Исходя из графика (рис. 13) характеристики аммиачного компрессора получаем уравнение: Р/S = tga, (15)
тогда уравнение аммиачного компрессора: W(s)= tga (16), т.е. W(s) = К=1 (17)

Рис. 13. Характеристика аммиачного компрессора
где, S – перемещение золотника;
Р – давление после аммиачного компрессора.
3. Определим передаточную функцию камеры хранения готовой продук-ции.
По экспериментальным данным получена характеристика камеры хранения готовой продукции, которая приведена на рис. 14.

Рис. 14. Характеристика камеры хранения готовой продукции
q – температура в камере хранения готовой продукции;
t – время.
По графику (рис. 14), можно идентифицировать данный объект как апериодическое звено 1-го порядка с передаточной функцией:
W(s) = K/(Ts + 1). (18)
T = Tк / 3 = 1120с; (19)
где, T - постоянная времени камеры хранения готовой продукции;
Tк - время за которое температура в камере достигнет заданной величины (по экспериментальным данным Tк = 3360 с).
K - коэффициент усиления камеры хранения готовой продукции.
К = Dq / DS = 8 (20)
где, Dq - изменение температуры в камере хранения готовой продукции при открытии золотника на 50% (экспериментальным данным - 4  );
);
DS = 0,5 – изменение положения золотника от 0 до 50%.
Передаточная функция объекта имеет вид:
W(s) = 8/ (1120s +1) (21)
4. Определим передаточную функцию термометра сопротивления.
По экспериментальным данным получена характеристика термометра сопротивления, которая приведена на рис. 15.
Рис. 15. Характеристика термометра сопротивления
По графику (рис. 15), можно идентифицировать данный объект как апериодическое звено 1-го порядка с передаточной функцией:
W(s) = K/(Ts + 1); (22)
T = Tтс / 3 = 41,67с; (23)
где, T - постоянная времени термометра сопротивления;
Tтс - время за которое температура термометра сопротивления достигнет заданной величины (по экспериментальным данным Tк = 125 с).
K - коэффициент усиления камеры хранения готовой продукции.
К = 1, т.к. выходной сигнал термометра сопротивления имеет прямо-пропорционален измеряемой температуре.
Передаточная функция объекта имеет вид:
W(s) = 1/ (41,67s +1) (24)
5. Выбор и настройка регулятора.
Путем моделирования в пакете “SIAM” была проанализирована переходная характеристика объекта (камеры хранения готовой продукции) с различными регуляторами:
– с импульсным ПИД – регулятором (рис. 16)

Рис. 16. Математическая модель импульсного ПИД – регулятора
В результате моделирования в пакете “SIAM” была получена переходная
характеристика объекта регулирования (камеры хранения готовой продукции), приведенная на рис. 17.
Из графика переходная характеристика объекта регулирования были получены:
- время переходного процесса – 6912 с;
- ошибка регулирования –» 11%.
На основе полученных данных делаем вывод, что импульсный ПИД – регулятор для контура регулирования температуры в камере готовой продукции по технологическим требованиям не подходит.
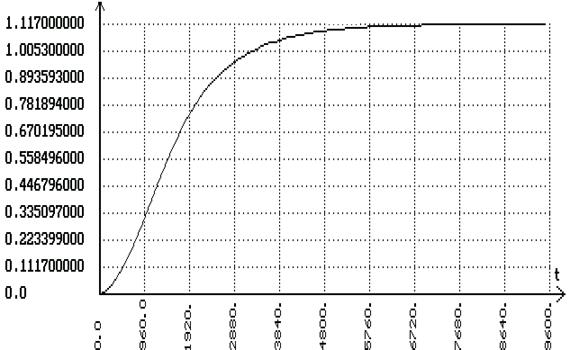
Рис. 17. Переходная характеристика камеры хранения готовой продукции
– с импульсным ПИ –регулятором (рис. 18)

Рис. 18. Математическая модель импульсного ПИ – регулятора
В результате моделирования в пакете “SIAM” была получена переходная
характеристика объекта регулирования (камеры хранения готовой продукции), приведенная на рис. 19.

Рис. 19. Переходная характеристика камеры хранения готовой продукции
Из графика переходная характеристика объекта регулирования были получены:
- время переходного процесса – 3552 с;
- ошибка регулирования –» 0,004%.
На основе полученных данных делаем вывод, что импульсный ПИ – регулятор хорошо справляется с задачей регулирования температуры в камере готовой продукции. Таким образом получаем математическую модель контура регулирования температуры в камере хранения готовой продукции (см. рис.20).

Рис. 20. Математическая модель контура регулирования температуры в камере хранения готовой продукции
-
|

-
|
- сигнал рассогласования.

ъ 
Продолжение рис. 21














