 2020-01-14
2020-01-14 159
159РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ КОНТУРА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ “ЛЕДЯНОЙ ВОДЫ”
Определим неизменяемую часть контура регулирования:
1. Определим передаточную функцию исполнительного механизма:
Исполнительный механизм (ИМ) постоянной скорости может находиться только в трёх состояниях: перемещение регулирующего органа (РО) с постоянной скоростью S, неподвижность, перемещение РО в обратную сторону с постоянной скорость S. Без учёта времени разгона и торможения статическая характеристика dm/dt = f(Z) исполнительного механизма постоянной скорости с пусковым устройством является существенно нелинейной.
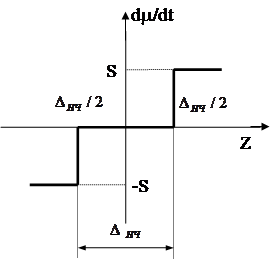
Рис.7 Статическая характеристика ИМ постоянной скорости
|
-
|

-
|
- сигнал на выходе пускового устройства.
Её нельзя линеаризовать с достаточной для практических расчётов точностью при различных диапазонах изменения входного сигнала Z.
Однако такой исполнительный механизм может иметь достаточно близкие к линейным характеристики при релейно-импульсном изменении входного сигнала.
Подадим на вход исполнительного механизма с постоянной частотой вращения импульсы напряжения Zн (см. рис. 7) с периодом следования Тпер и скважностью:
g = Dtимп / Тпер, (1)
где, Тпер = Dtимп + Dtпауз (2)
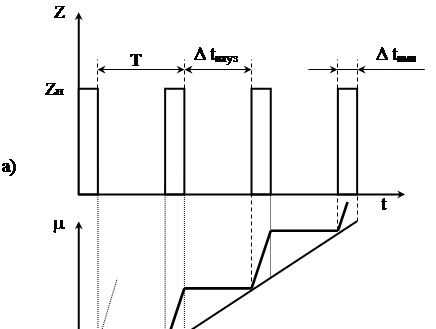
Рис. 8. Характер перемещения ИМ постоянной скорости (б) при поступлении на его вход серии постоянных импульсов (а)
Dtимп - длительность импульсов;
Dtпауз - длительность пауз.
Во время поступления импульса исполнительный механизм будет перемещать РО с постоянной скоростью dm/dt = S = tg a (рис. 8, б). Во время пауз ИМ будет неподвижен.
При поступлении на ИМ серии импульсов характер его перемещения будет иметь вид, представленный на рис. 8, б.
Средняя скорость перемещения будет иметь равна:
dm/dt = tg a = Dtимп S/T, (3)
или с учётом (1)
dm/dt = gS; (4)
Преобразовав (4) по Лапласу, получим
Wим(p) = M/(p)/Г(p) = S/p; (5)
Таким образом исполнительный механизм можно представить интегрирующим звеном с передаточной функцией:
W(s) = 1/s×Тим (6)
где, Тим - постоянная времени исполнительного механизма постоянной скорости, время полного хода (расчётное время полного перемещения ИМ) которое по паспарту равно Тим = 24с.
2. Определим уравнение регулирующего клапана.
Исходя из графика (рис. 9) характеристики регулирующего клапана получаем уравнение:
tga = Q/S, (7)
тогда уравнение регулирующего клапана:
W(s) = tga (8), т.е. W(s) = К (9)

Рис. 9. Характеристика регулирующего клапана
где, S – перемещение регулирующего органа;
Q – расход “ледяной воды” через регулирующий клапан.
3. Определение передаточной функции насосов “ледяной воды”
Давление на выходе насосов “ледяной воды” достигает нужной величины не мгновенно, а спустя некоторое время. По экспериментальным данным это время в среднем составляет 1,5 с. Можно сделать вывод, что компрессор является инертным объектом. Давление на выходе будет нарастать по зависимости полученной экспериментально и приведённой на рис. 10.
По графику (рис. 10), можно идентифицировать данный объект как апериодическое звено 1-го порядка с передаточной функцией:
W(s) = K/(Ts + 1). (10)
T = Tн / 3 = 0,5с; (11)
где, T - постоянная времени насоса “ледяной воды”;

Рис. 10. Характеристика насоса “ледяной воды”
Tн - время за которое давление достигнет заданной величины (по экспери-
ментальным данным - 1,5 с).
K - коэффициент усиления насоса “ледяной воды”.
К =  = 0,45 (12)
= 0,45 (12)
где,  - максимальное давление при полностью открытом регулировочном клапане, (по экспериментальным данным - 4,5
- максимальное давление при полностью открытом регулировочном клапане, (по экспериментальным данным - 4,5  );
);
 - расход “ледяной воды” через полностью открытый регулиро-вочный клапан (из паспорта - 10
- расход “ледяной воды” через полностью открытый регулиро-вочный клапан (из паспорта - 10  ).
).
Передаточная функция объекта имеет вид:
W(s) = 0,45/ (0,5s +1) (13)
Постоянной времени (время задержки) измерительного устройства (преобразователем электрическим Сапфир – 22ДИ) можно пренебречь, так как, оно очень мало по сравнению с постоянной времени объекта T, и не учитывать его в качестве звена в неизменяемой части объекта.
4. Выбор и настройка регулятора.
Исходя из графика статической характеристики ИМ постоянной скорос-ти (рис. 7) был выбран трехпозиционный регулятор. Путем моделирования в пакете “SIAM” были подобраны настройки регулятора (рис.11).

Рис.11. Математическая модель трехпозиционный регулятор
Таким образом получаем математическая модель контура регулирования “ледяной воды” (рис. 12).

Рис. 12. Математическая модель контура регулирования “ледяной воды”
-
|

-
|
- сигнал рассогласования.








