 2020-01-14
2020-01-14 180
180

Структурная формула данной компоновки: Z0ZZCv
Достоинства: можно производить демонтаж стола, простота сборки станка, т.к. коробку скоростей и подач можно собрать отдельно от станины, увеличиваются габариты обрабатываемой детали.
Недостаток: уменьшается жёсткость не только из-за стола, но и из-за возможности перемещать шпиндельный узел, а следовательно уменьшается точность обработки.
Деталь; 2 – станина станка; 3 - коробка скоростей и подач; 4 – шпиндель; 5 – стол.
Из рассмотренных вариантов выбираем второй, так как он самый оптимальный по жёсткости и точности.
Проектирование и описание кинематической схемы станка
Проектирование кинематики привода главного движения
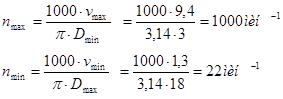
Определяем предельный частоты вращения:
Диапазон регулирования Rn частот вращения исполнительного органа


Определяем число ступеней коробки скоростей, при j=1,41:

Проверяем возможность осуществления простой мощности станка:

Для прямозубых колес С=8

Значит структура простая. Из множества возможных вариантов порядка расположения и переключения групповых передач выбираем вариант при котором вес и габариты проектируемого привода минимальны.

Проверяем осуществимость принятого варианта структуры привода по диапазону регулирования группы по условию

 - принятый вариант осуществим.
- принятый вариант осуществим.

Рис. 3 Структурная сетка.


Рис. 4 График частот вращения.
Передаточные отношения принимаем:







Исходя из этого, рассчитываем числа зубьев колёс:
i1=1/2 i2=5/7 i3=1/1
a1+b1=3 a2+b2=12 a3+b3=2
Наименьшее общее кратное равно 12, т.к. Zmin=18.
Тогда Z1=20, Z2=40, Z3=25, Z4=35, Z5=30, Z6=30
i4=19/53 i5=1/1
a4+b4=72 a5+b5=2
Наименьшее общее кратное равно 72, при условии, что Zmin=18.
Тогда Z7=19, Z8=53, Z9=38, Z10=38
i6=1/4 i7=2/1
a6+b6=5 a7+b7=3
Наименьшее общее кратное равно 15, при условии, что Zmin=19.
Тогда Z11=20, Z12=80, Z13=80, Z14=20.

Рис. 5 Кинематическая схема привода.








