2020-04-20
2020-04-20 238
238
Статическим расчётом регулятора определяются его основные размеры и статические характеристики.
При расчёте регулятора известен полный ход рейки топливного насоса  =16мм. (см. таб. 2). И ход рейки в пределах регуляторной характеристики
=16мм. (см. таб. 2). И ход рейки в пределах регуляторной характеристики  =14мм., а также размеры рычага
=14мм., а также размеры рычага 
 и радиусы
и радиусы 

Размеры  и
и  должны удовлетворять равенству:
должны удовлетворять равенству:
 ;(2.1)
;(2.1)
где  - ход муфты регулятора в пределах регуляторной характеристики.
- ход муфты регулятора в пределах регуляторной характеристики.
Тогда
 ,мм.(2.2)
,мм.(2.2)
 мм.
мм.
Конструктивный ход муфты  включает запас на полное выключение топлива и максимальную подачу его при перегрузке двигателя и выбирается в пределах:
включает запас на полное выключение топлива и максимальную подачу его при перегрузке двигателя и выбирается в пределах:
 .(2.3)
.(2.3)
Принимаем  мм.
мм.
Для улучшения характеристик регулирования рекомендуется принимать более высокие значения номинального числа оборотов валика регулятора  , но так, чтобы:
, но так, чтобы:
 ,(2.4)
,(2.4)
где  - скорость вращения оси грузов относительно оси регулятора;
- скорость вращения оси грузов относительно оси регулятора;
 - расстояние между осями вращения измерителя и качания грузов;
- расстояние между осями вращения измерителя и качания грузов;
 ;(2.5)
;(2.5)
где i=2,5 - передаточное отношение повышающей передачи от двигателя к регулятору (см. таб. 3).

Для топливных насосов золотникового типа сопротивление рейки f=0,3…0,4 Н на каждый плунжер. Принимаем f=0,35 Н.
Сила сопротивления рейки топливного насоса, приведённая к оси движения муфты:
 (2.6)
(2.6)
 Н.
Н.
Величина степени нечувствительности на номинальном режиме  1,5%(см. таб. 3).
1,5%(см. таб. 3).
Восстанавливающая сила на номинальном режиме приведённая к муфте регулятора:
 Н.(2.7)
Н.(2.7)
Уравнение статического равновесия регулятора на номинальном режиме имеет вид:
 ;(2.8)
;(2.8)
где А - инерционный коэффициент;
 - угловая частота вращения валика регулятора;
- угловая частота вращения валика регулятора;
 .(2.9)
.(2.9)
Центробежная сила грузов на номинальном режиме:
 ;(2.10)
;(2.10)
где m-масса грузов, кг.
 - расстояние центра массы грузов до оси вала регулятора, мм.
- расстояние центра массы грузов до оси вала регулятора, мм.
Для упрощения расчетов пронимаем грузы регулятора шарообразной формы.
Из условия равенства моментов относительно оси качания грузов, можно записать:
 ;(2.11)
;(2.11)
Решая совместно уравнения (2.8) и (2.11) получим:
 (2.12)
(2.12)
На основании уравнения (2.10) и (2.12)
 ;(2.13)
;(2.13)
где  - масса одного груза, кг.
- масса одного груза, кг.
 - количество грузов ( =2).
- количество грузов ( =2).
 кг.
кг.
Так как грузы имеют шарообразную форму, то радиус шара определяется как:
 ;(2.14)
;(2.14)
где  - плотность материала груза,( =8000 кг/м³).
- плотность материала груза,( =8000 кг/м³).
 м.
м.
Максимальный радиус вращения грузов, соответствующий режиму максимальных оборотов холостого хода:
 мм(2.15)
мм(2.15)
Для нахождения графической зависимости величины восстанавливающей силы  , приведённой к центру тяжести груза от радиуса вращения груза
, приведённой к центру тяжести груза от радиуса вращения груза  необходимо оценить на номинальном режиме степень неравномерности регулятора, соответствующую режиму максимальных оборотов холостого хода.
необходимо оценить на номинальном режиме степень неравномерности регулятора, соответствующую режиму максимальных оборотов холостого хода.
 % (см. таб. 3),
% (см. таб. 3),
 ;
;  (2.16)
(2.16)
Приведённая к центру тяжести грузов восстанавливающая сила на номинальном режиме:
 Н.(2.17)
Н.(2.17)
Приведённая к центру тяжести грузов восстанавливающая сила на режиме максимальных оборотов холостого хода:
 Н (2.18)
Н (2.18)
Минимальные обороты вала регулятора при работе двигателя по внешней характеристике:
 об/мин,(2.19)
об/мин,(2.19)
где  - минимальные обороты двигателя.
- минимальные обороты двигателя.
Степень неравномерности на минимальном скоростном режиме  =40% (см. таб. 3).
=40% (см. таб. 3).
Обороты вала двигателя на холостом ходу:
 об/мин.(2.20)
об/мин.(2.20)
Для вала регулятора:
 об/мин.(2.21)
об/мин.(2.21)
Угловые скорости:
 1/с.(2.22)
1/с.(2.22)
 1/с.(2.23)
1/с.(2.23)
Восстанавливающие силы на режимах минимальных оборотов и минимальных оборотов холостого хода:
 Н.(2.24)
Н.(2.24)
 Н.(2.25)
Н.(2.25)
Характеристики  (см. рис. 2.1) позволяют определить разность:
(см. рис. 2.1) позволяют определить разность:
 Н.(2.26)
Н.(2.26)
которая показывает изменение восстанавливающей силы регулятора, приведённой к центру тяжести груза, на номинальном регулируемом скоростном режиме при перемещении регулирующего органа от полной подачи топлива до подачи холостого хода. Тогда величина изменения восстанавливающей силы, приведённой к муфте регулятора, определится как:
 Н.(2.27)
Н.(2.27)
двигатель вал регулятор вращение
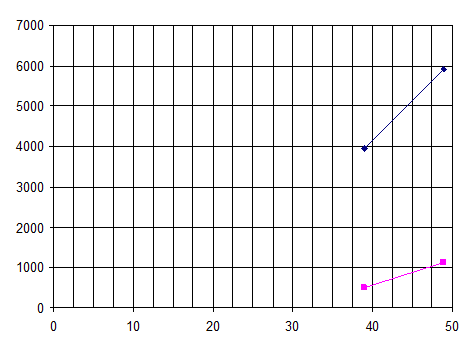
Рис. 7 - Зависимости восстанавливающей силы  и поддерживающей силы
и поддерживающей силы  , приведенных к центру тяжести грузов от радиуса r для механического регулятора
, приведенных к центру тяжести грузов от радиуса r для механического регулятора
Определяем жёсткость пружины:
 Н/м.(2.28)
Н/м.(2.28)
Величина предварительной деформации пружины:
 мм.(2.29)
мм.(2.29)
Максимальная деформация:
 мм.(2.30)
мм.(2.30)
Равновесные характеристики  являются основными статическими характеристиками регулятора (см. рис. 8). Каждой настройке регулятора соответствует
являются основными статическими характеристиками регулятора (см. рис. 8). Каждой настройке регулятора соответствует
своя равновесная характеристика.

Рис. 8 - Равновесные характеристики регулятора для минимальной 1-2 и максимальной 3-4 затяжки пружины
К статическим характеристикам регулятора относится и фактор его устойчивости:
 ;(2.31)
;(2.31)
где А - инерционный коэффициент поддерживающей силы.
 (2.32)
(2.32)
где  Н - определяется из графика (см. рис. 2.1).
Н - определяется из графика (см. рис. 2.1).
Динамика регулятора
Динамические свойства регулятора для случая постоянства его настройки могут быть
исследованы с помощью уравнения движения регулятора:
 ,(2.33)
,(2.33)
или в операторной форме:
 ,(2.34)
,(2.34)
где  - собственный оператор регулятора,
- собственный оператор регулятора,
 (2.35)
(2.35)
 и
и  - безразмерные выходная и входная координата регулятора;
- безразмерные выходная и входная координата регулятора;
 - время регулятора прямого действия;
- время регулятора прямого действия;
 - время катаракта;
- время катаракта;
 - местная степень неравномерности регулятора.
- местная степень неравномерности регулятора.
Время регулятора на номинальном режиме:
 (2.36)
(2.36)
где  - приведённая к оси движения муфты масса деталей регулятора и топливного насоса, связанных в движении с регулятором;
- приведённая к оси движения муфты масса деталей регулятора и топливного насоса, связанных в движении с регулятором;
 (2.37)
(2.37)
где  - приведённые массы грузов, пружины, муфты, топливного насоса и рычагов.
- приведённые массы грузов, пружины, муфты, топливного насоса и рычагов.
 кг;(2.38)
кг;(2.38)
 кг;(2.39)
кг;(2.39)
 от
от  кг.
кг.
 кг.
кг.
 с.
с.
Время катаракта на номинальном режиме:
 с;(2.40)(2.40)
с;(2.40)(2.40)
где  - фактор торможения (см. таб. 3).
- фактор торможения (см. таб. 3).
Местная степень неравномерности на номинальном режиме:
 .(2.41)
.(2.41)
Уравнение передаточной функции регулятора имеет вид:
 (2.42)
(2.42)
Тогда вещественная и мнимая частотные характеристики определяются по формуле:
 .(2.43)
.(2.43)
Таблица 9 - Значения функции  и
и 
| ω, с-1 | 0 | 5 | 10 | 30 | 50 | 100 | 200 | 500 |
| Xд(ω) | 0,809 | 0,802 | 0,782 | 0,615 | 0,429 | 0,169 | 0,037 | -0,010 |
| Уд(ω) | 0,000 | -0,076 | -0,148 | -0,351 | -0,413 | -0,347 | -0,208 | -0,085 |
По результатам построены графики (см. рис. 9-11).

Рис. 9 - Действительная частотная характеристика регулятора

Рис. 10 - Мнимая частотная характеристика регулятора

Рис. 11 - Амплитудно-фазовая частотная характеристика регулятора
Сводный переходный процесс регулятора  (см. рис. 2.6) есть общий интеграл его дифференциального уравнения (2.33).
(см. рис. 2.6) есть общий интеграл его дифференциального уравнения (2.33).
При  :
:  ;(2.44)
;(2.44)
где  и
и  - корни характеристического уравнения:
- корни характеристического уравнения:
 ,(2.45)
,(2.45)
из которого следует, что:
 .(2.46)
.(2.46)



 константы интегрирования, значения которых зависят от начальных условий движения.
константы интегрирования, значения которых зависят от начальных условий движения.


 (2.47)
(2.47)
Н.У. 


 .
.
Таблица 10 - Значения функции 
| t | 0 | 0,003 | 0,005 | 0,01 | 0,02 | 0,03 | 0,04 | 0,05 | 0,07 | 0,09 | 0,1 |
| η(t) | 0,0001 | 0,1089 | 0,1846 | 0,3399 | 0,5442 | 0,6596 | 0,7247 | 0,7614 | 0,7939 | 0,8042 | 0,8063 |
Чувствительный элемент должен быть всегда устойчивым ( ).
).
Так как выполняется неравенство:
 ,(2.48)
,(2.48)
то переходный процесс регулятора будет апериодически сходящимся.
 = 1206750;
= 1206750;  = 122376.
= 122376.

Рис. 12