 2020-04-20
2020-04-20 110
110
Результаты кинематического исследования сводим в таблицу 3.
Таблица 1.3
| Положение | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| , град | 0 | 30 | 60 | 90 | 120 | 150 | 180 | 210 | 240 | 270 | 300 | 330 |
| VВ, м/с план | 2,30 | 2,00 | 0,95 | 0,48 | 1,72 | 2,29 | 2,11 | 1,43 | 0,59 | 0,29 | 1,16 | 1,92 |
| VВ, м/с диагр | 2,29 | 2,03 | 0,93 | 0,51 | 1,68 | 2,29 | 2,11 | 1,44 | 0,58 | 0,30 | 1,16 | 1,92 |
| , % | 0,70 | -1,65 | 1,36 | -4,91 | 2,14 | -0,04 | 0,05 | -0,48 | 0,66 | -2,72 | 0,44 | 0,02 |
| VЕ, м/с план | 0,00 | 0,88 | 1,69 | 2,24 | 2,19 | 1,36 | 0,00 | 1,36 | 2,19 | 2,24 | 1,69 | 0,88 |
| VЕ, м/с диагр | 0,00 | 0,86 | 1,70 | 2,23 | 2,23 | 1,32 | 0,00 | 1,31 | 2,23 | 2,23 | 1,70 | 0,86 |
| , % | 0 | 1,37 | -0,35 | 0,42 | -1,93 | 3,41 | 0 | 3,86 | -1,85 | 0,42 | -0,35 | 1,37 |
| ВА, с-1 план | 0,72 | 2,62 | 3,77 | 3,94 | 3,10 | 1,41 | 0,72 | 2,62 | 3,77 | 3,94 | 3,10 | 1,41 |
| ВА, с-1 диагр | 0,68 | 2,59 | 3,73 | 3,88 | 3,08 | 1,38 | 0,71 | 2,59 | 3,73 | 3,99 | 3,08 | 1,40 |
| , % | 5,11 | 0,98 | 1,10 | 1,49 | 0,73 | 1,67 | 1,49 | 1,06 | 1,08 | -1,22 | 0,79 | 0,53 |
| ЕА, с-1 план | 4,00 | 3,49 | 2,05 | 0,00 | 2,05 | 3,49 | 4,00 | 3,49 | 2,00 | 0,00 | 2,05 | 3,49 |
| ЕА, с-1 диагр | 3,96 | 3,46 | 2,03 | 0,00 | 2,02 | 3,44 | 3,95 | 3,46 | 0,23 | 0,00 | 2,03 | 3,55 |
| , % | 1,10 | 0,82 | 1,05 | 0,00 | 1,54 | 1,36 | 1,33 | 0,82 | 88,42 | 0,00 | 0,86 | -1,53 |
| aB план, м/с2 | - | - | 58,14 | - | - | - | - | 15,41 | - | - | - | - |
| aB диагр, м/с2 | 2,76 | 26,54 | 48,37 | 42,69 | 33,94 | 2,48 | 14,60 | 21,03 | 25,53 | 26,39 | 26,77 | 18,99 |
| , % | - | - | -16,79 | - | - | - | - | 36,49 | - | - | - | - |
| aE план, м/с2 | - | - | 22,40 | - | - | - | - | 35,63 | - | - | - | - |
| aE диагр , м/с2 | 28,18 | 26,65 | 21,68 | 8,18 | 10,54 | 33,94 | 48,65 | 33,94 | 10,54 | 8,18 | 21,68 | 26,65 |
| , % | - | - | -3,18 | - | - | - | - | -4,72 | - | - | - | - |
Расхождение результатов не превышает 5%
Превышение 5% в расхождении значений ускорений точки В объясняется погрешностью при выполнении графического дифференцирования.
Кинематический анализ кулачкового механизма
Построение плана положений
Задан кулачковый механизм (рис. 2.1) с размерами:
1. Радиус  24
24
2. Радиус  36
36
3. Радиус  24
24
4. Расстояние  12
12
5. Длина  80
80
6. Расстояние  100
100
7. Угловая скорость  10
10
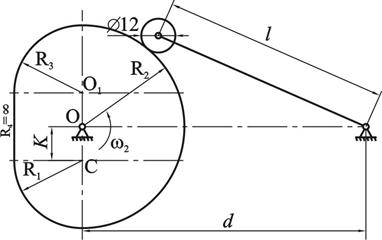
Рис. 2.1 Кинематическая схема кулачкового механизма
В соответствии с исходными данными строим в масштабе кулачек, масштабный коэффициент при этом выбираем  .
.
Задача анализа кулачкового механизма сводится к определению положений толкателя в зависимости от положения кулачка и установлению скоростей и ускорений толкателя. Для кулачкового механизма с вращательным движением толкателя, снабженным роликом, задача об определении положения и перемещения толкателя решается следующим образом.
Центр вращения ролика всегда находится от действительного профиля кулачка на расстоянии, равном радиусу ролика  . Геометрическое место точек, через которые будет проходить центр вращения ролика, образует собой центровой профиль кулачка. Для определения положения толкателя применяем метод обращения, т.е. кулачек оставляем неподвижным, а толкатель вместе со стойкой поворачиваем на заданный угол
. Геометрическое место точек, через которые будет проходить центр вращения ролика, образует собой центровой профиль кулачка. Для определения положения толкателя применяем метод обращения, т.е. кулачек оставляем неподвижным, а толкатель вместе со стойкой поворачиваем на заданный угол  относительно оси вращения кулачка в направлении, противоположном его вращению. Радиусом
относительно оси вращения кулачка в направлении, противоположном его вращению. Радиусом  из центра вращения кулачка проводим окружность – геометрическое место точек положений центра вращения толкателя. Для определения положения центра вращения толкателя для нулевого положения, на центровом профиле берем точку наиболее приближенную к оси кулачка и радиусом
из центра вращения кулачка проводим окружность – геометрическое место точек положений центра вращения толкателя. Для определения положения центра вращения толкателя для нулевого положения, на центровом профиле берем точку наиболее приближенную к оси кулачка и радиусом  проводим еще одну окружность. на пересечении получаем центр вращения толкателя для нулевого положения (точка 0). Окружность радиусом от точки 0 делим на равные части по 15 градусов, получая точки 1, 3, 4, 5, 6, 7….. Проводим из этих точек окружности радиусом . Они будут пересекать центровой профиль кулачка в точках, в которых будет находиться центр ролика толкателя для соответствующих положений. Измеряем углы между отрезками длиной
проводим еще одну окружность. на пересечении получаем центр вращения толкателя для нулевого положения (точка 0). Окружность радиусом от точки 0 делим на равные части по 15 градусов, получая точки 1, 3, 4, 5, 6, 7….. Проводим из этих точек окружности радиусом . Они будут пересекать центровой профиль кулачка в точках, в которых будет находиться центр ролика толкателя для соответствующих положений. Измеряем углы между отрезками длиной  и
и  получаем углы
получаем углы  ,
,  и т. д.
и т. д.
Дополнительно берем точки 2, 8, 9, 14, соответствующие моменту перехода ролика от одного участка кулачка к другому (Под участком понимаем часть профиля кулачка с одинаковым законом изменения профиля). Угловое перемещение толкателя буде определять как разность углов произвольного  и начального
и начального  положения:
положения:

Линейное перемещение ролика будет пропорционально угловому перемещению:









