 2020-04-07
2020-04-07 421
421Эталонная модель определяет желаемые динамические характеристики системы в каждый момент времени. Порядок и параметры эталонной модели зависят от порядка и свойств объекта управления, а также требуемого качества работы системы управления.
Модель может выбираться из условия оптимума некоторой меры качества, например, из условия минимума интегральных оценок качества работы системы.
Если требуется обеспечить минимум интеграла от взвешенного модуля ошибки:
 ,
,
то при отработке ступенчатого входного сигнала системой второго порядка оптимальной является передаточная функция со следующими параметрами
где Т – постоянная времени, определяемая по заданному быстродействию.
Звено с данной передаточной функцией может быть выбрано в качестве эталонной модели.
Параметры эталонной модели также можно определить по значениям выбранных мод или корней характеристического полинома на основе известных показателей качества переходного процесса. Среди основных способов реализации эталонных моделей выделим следующие,
1. Реальная техническая система, обладающая желаемыми характеристиками,
2. Экстраполятор, вычисляющий требуемое значение выходной координаты системы по входному сигналу и по предыдущим значениям выходного сигнала или их оценкам,
3. Устройство в цифровом или аналоговом виде, обладающее желаемыми динамическими свойствами замкнутой системы по координатам состояния, например, эталонная система, которая описывается дифференциальным уравнением
 ,
,
реализуется согласно структурной схеме, представленной на рис. 1.4.
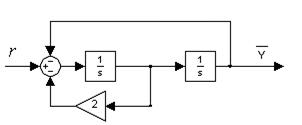
Рис. 1.4. Схема эталонной модели
4. Система, реализованная на основе наблюдателя состояния или, в частном случае, фильтра оценки производных выходных переменных.
Представление модели в виде 1 или 3 можно отнести к явным, а 2 и 4 – к неявным способам реализации.








