 2020-04-12
2020-04-12 226
226Дисциплина: «Основы теории пилотажно-навигационных систем»
Преподаватель: Ползик Владимир Палладьевич.
Учебный год: 2019-2020. Семестр: 6.
Филиал «Стрела» МАИ. Кафедра: С-16. РПКБ. Группа: СО-302С-17
Специальность: 24.05.06 – «Системы управления ЛА».
Специализация: «Измерительно-вычислительные комплексы систем управления воздушно-космических ЛА»
| № | ФИО | 1. Орто, локсо | 2. Орто Меркатор | 3. | 4 | 5 | 6 | 7 | 8 |
| 1. | Белая Алина | ||||||||
| 2. | Джеломанова Валерия | ||||||||
| 3. | Зарубин Илья | ||||||||
| 4. | Кокорева Анастасия | ||||||||
| 5. | Морозова Екатерина | ||||||||
| 6. | Степанов Константин | ||||||||
| 7. | Федорова Елизавета | ||||||||
| 8. | Шарашин Александр |
Филиал «Стрела» МАИ. Кафедра: С-12. ЦАГИ. Группа: СО-304С-17
Специальность: 24.05.06 – «Системы управления ЛА».
Специализация: «Системы управления движением ЛА»
| № | ФИО | 1. Орто, локсо | 2. Орто Меркатор | 3. | 4 | 5 | 6 | 7 | 8 |
| 1. | Горенков Дмитрий | ||||||||
| 2. | Гранин Артур | ||||||||
| 3. | Джанумов Никита | ||||||||
| 4. | Канухин Георгий | ||||||||
| 5. | Ковалева Елизавета | ||||||||
| 6. | Корсакова Полина | ||||||||
| 7. | Максимов Игорь | ||||||||
| 8. | Матыцына Полина | ||||||||
| 9. | Новиков Александр | ||||||||
| 10. | Овчинников Илья | ||||||||
| 11. | Петрова Анастасия | ||||||||
| 12. | Пучков Дмитрий | ||||||||
| 13. | Рогачев Иван | ||||||||
| 14. | Рыбакова Марина | ||||||||
| 15. | Рыбин Максим | ||||||||
| 16. | Федюшин Владислав | ||||||||
| 17. | Ясев Даниил |
Дистанционное обучение.
Преподаватель: Ползик Владимир Палладьевич. mai-c19@mail.ru
Задание 2 на 27.03.2020 г.
1.1. Изучить теоретический материал в соответсвии с конспектом (прилагается).
1.2. Выполнить практику №2.
1.3. Файл с выполненным заданием переслать преподавателю.
Литература
1. Сарайский Ю.Н., Алешков И.И. Аэронавигация. Часть I. Основы навигации и применение геотехнических средств: Учебное пособие. 2-е изд., исправл./Университет ГА.С-Петербург,2013, 298 с.
2. Черный М.А., Кораблин В.И. Самолетовождение. Изд-во «Транспорт», 1973 г. 368с.
3. Конспект лекций.
Практика 2. Траектория ортодромии в картографической проекции Меркатора.
1. Выполнить расчёт и построить траекторию движения ЛА между двумя точками в картографической проекции Меркатора.
Даны географические координаты точек (j1, l1) и (j2,l2) из первой задачи.
| l |
| j |
| j i |
| l i |
| l i+1= l i+ Dl |
| j i+1 |
| l i+1= l i+ Dl |
| j i+1 |
| b |
| b |
Формулы для расчета
Линия ортодромии строится на карте по промежуточным точкам, от точки к точке. При этом сначала задаётся новое значение долготы l=l1 + Dl, (Dl =1°), затем вычисляется величина широты j по формуле:
 .
.
Конечная точка маршрута остаётся неизменной (j2, l2).
Путевой угол β (ПУ) ортодромии, проходящей из первой точки (j1, l1) во вторую (j2, l2), и измеренный относительно меридиана первой точки определяется по формуле
 .
.
Расчет выполнить в среде Excel и результаты представить в виде таблицы и графика.
| № | j1 | l1 | j2 | l2 | l | tgj | j | tgβ | β |
| 1 | 55,75 | 37,61 | 43,11 | 131,82 |
|
| |||
| 2 |
|
|
|
|
|
|
Последовательность выполнения задания в Excel
- занести исходные данные в таблицу (j1, l1) и (j2,l2);
- вычислить новое значение l=l1 + Dl,при этом задать Dl =1°;
- вычислить tgj по формуле и j = arctg(tgj) * 57,3°;
- вычислить tgβ по формуле и определить β:
β = arctg(tgβ) * 57,3°, если tgβ > 0;
β = arctg(tgβ) * 57,3°+ 180°, если tgβ < 0.
- на второй строке сделать ссылку l1 = l и j1=j;
- координаты конечной точки остаются неизменными (j2, l2) во всей таблице;
- заполнить остальные ячейки второй строки;
- размножить вторую строку таблицы до l1 =131°;
- построить график траектории в координатах (l по горизонтали, j по вертикали);
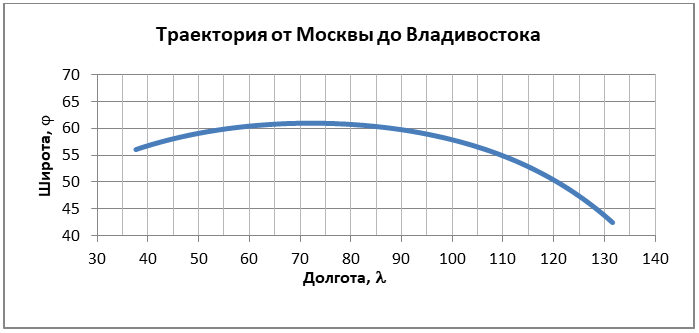
- дать название графику «Траектория ортодромии по Меркатору».
Исходные данные и график траектории из Excel, перенести в отчет по практической работе в файл Word. На графике указать точку вертекса ортодромии, в которой ПУ=90°. По географической карте найти ближайший населённый пункт к точке вертекса с указание области (региона).
В очете сделать вывод и указать:
- координаты (j1, l1) и начальный ПУ ортодромии при взлете;
- координаты (j, l) и ПУ точки вертекса ортодромии;
- координаты (j2, l2) и конечный ПУ ортодромии при посадке.
Пример результатов расчёта
| № | φ1 | l1 | φ2 | l2 | l | tgj | j | tgβ | β (ПУ) |
| 1 | 55,75 | 37,61 | 43,11 | 131,82 | 38,61 | 1,486509 | 56,07 | 1,69777 | 59,50 |
| 2 | 56,07 | 38,61 | 43,11 | 131,82 | 39,61 | 1,504094 | 56,38 | 1,755298 | 60,33 |
| 3 | 56,38 | 39,61 | 43,11 | 131,82 | 40,61 | 1,521221 | 56,68 | 1,816053 | 61,16 |
| 4 | 56,68 | 40,61 | 43,11 | 131,82 | 41,61 | 1,537885 | 56,97 | 1,88033 | 61,99 |
| 5 | 56,97 | 41,61 | 43,11 | 131,82 | 42,61 | 1,554081 | 57,24 | 1,948459 | 62,83 |
| 6 | 57,24 | 42,61 | 43,11 | 131,82 | 43,61 | 1,569803 | 57,50 | 2,020817 | 63,67 |
| 7 | 57,50 | 43,61 | 43,11 | 131,82 | 44,61 | 1,585047 | 57,75 | 2,09783 | 64,51 |
| 8 | 57,75 | 44,61 | 43,11 | 131,82 | 45,61 | 1,599808 | 57,99 | 2,179984 | 65,36 |
| 9 | 57,99 | 45,61 | 43,11 | 131,82 | 46,61 | 1,614082 | 58,22 | 2,267838 | 66,20 |
| 10 | 58,22 | 46,61 | 43,11 | 131,82 | 47,61 | 1,627865 | 58,44 | 2,362034 | 67,05 |
| … | … | … | … | … | … | … | … | … | … |
| 95 | 43,28 | 131,61 | 43,11 | 131,82 | 132,61 | 0,91467 | 42,45 | -0,89322 | 138,22 |
Пример графика траектории
Лекционный материал








