 2020-04-20
2020-04-20 260
260
Радиотехнические системы работают в условиях многолучевого распространения радиоволн, поэтому при приеме сигнала наблюдается эффект замирания сигнала. Попадание на вход приемника мощной широкополосной помехи приводит к смещению рабочей точки характеристики активного элемента на нелинейный участок характеристики и в результате – к подавлению полезного сигнала мощной помехой. Сигнал на входе следящей системы пропадает, что эквивалентно размыканию контура. На структурной схеме (Рис.6) это явление можно отобразить введением двух ключей Кл1 и Кл2. Пропадание сигнала приводит к размыканию ключа Кл1 и переводу ключа Кл2 в положение 2, поскольку меняется характер флюктуаций.
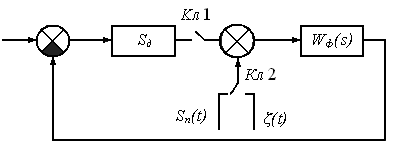
Рис.6. Структурная схема следящей системы с учетом пропадания полезного сигнала на входе.
Если в режиме слежения закон распределения ошибки нормальный с нулевым математическим ожиданием и в момент времени  следящая система разомкнулась, то через время
следящая система разомкнулась, то через время  , характер распределения ошибки слежения изменится: увеличится математическое ожидание и дисперсия. Если в момент
, характер распределения ошибки слежения изменится: увеличится математическое ожидание и дисперсия. Если в момент  значение ошибки не выходит за пределы апертуры дискриминационной характеристики, то появление сигнала приведет к восстановлению режима слежения. Если же
значение ошибки не выходит за пределы апертуры дискриминационной характеристики, то появление сигнала приведет к восстановлению режима слежения. Если же  , то происходит срыв слежения.
, то происходит срыв слежения.
Вероятность того, что через после пропадания сигнала ошибка слежения не превышает  определяет память следящей системы:
определяет память следящей системы:
 .
.

Рис.7. Распределение плотности вероятности ошибки слежения.

Рис.8. Дискриминационная характеристика.
Рассмотрим пример.
Пусть следящая система имеет два интегратора (рис.9).
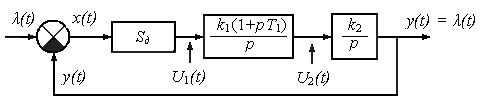
Рис.9. Структурная схема системы.
Задающее воздействие определяется линейной зависимостью
 ;
;
Поскольку система является астатической с астатизмом второго порядка установившееся значение ошибки равно нулю, т.е.
 .
.
Следовательно,
 ;
;  , а
, а  ,
,
т.е. напряжение на входе второго интегратора пропорционально скорости изменения задающего воздействия  .
.
Таким образом, система отслеживает скорость изменения входного процесса не по рассогласованию а по памяти. При пропадании сигнала на вход система будет отслеживать его изменение, если скорость не изменятся. При восстановлении сигнала ошибка будет минимальной, или равной нулю (в реальной ситуации срыв может произойти в результате флюктуаций управляемой величины под воздействием помех).
Память следящих систем определяется числом интегрирующих звеньев. Одно звено обеспечивает память по положению, два – по скорости, три – по ускорению.
Таким образом, система с астатизмом n –го порядка обладает памятью по n-1 производной задающего воздействия.
ЛИТЕРАТУРА
1. Коновалов. Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высш. шк., 2000.
2. Радиоавтоматика: Учеб. пособие для вузов. / Под ред.В.А. Бесекерского. - М.: Высш. шк., 2005.
3.. Первачев С. В. Радиоавтоматика: Учебник для вузов. - М.: Радио и связь, 2002.
4. Цифровые системы фазовой синхронизации / Под ред. М.И. Жодзишского – М.: Радио, 2000








