 2020-04-20
2020-04-20 121
121Зміна форми частинки чи тіла (деформація) може бути представлено компонентами, що характеризують зміна розмірів вздовж координатних осей і зміна кутів між ребрами на координатних площадках. Для елементарного паралелепіпеда є шість компонентів деформації - три лінійні (зміна довжини ребер вздовж трьох осей) і три зсувних (зміна кутів між ребрами на трьох координатних площадках; зсувні деформації іноді називають кутовими). На Рис.13 вказані ці компоненти деформації.
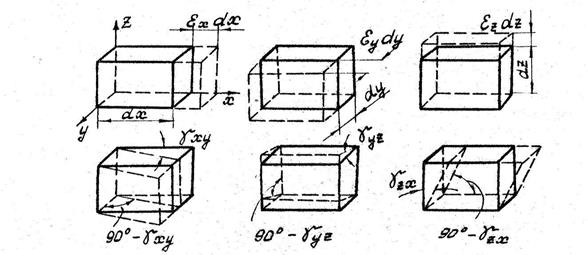
Рис. 3.13 Компоненти деформації
Лінійні деформації характеризують абсолютними і відносними показниками. Показники абсолютної деформації по кожній з координатних осей, мм
Δl = l1 - l0 – вздовж осі х; (47)
Δb = b1 - b0 – вздовж осі у; (48)
Δh = h1 - h0 – вздовж осі z; (49)
(знак Δ позначає зміну величини, а не окрему букву).
Тут l0, b0, h0 – начальні, l1, b1, h1 – кінцеві розміри елементарного об’єму вздовж осей х, y, z відповідно. Абсолютні показники недостатні для характеристики деформації, вплив якої сильно залежить від початкових розмірів. Більш поширені відносні показники деформації. Їх розраховують щодо початкових розмірів, хоча можна було б віднести абсолютні деформації і до кінцевих розмірів. Оскільки знаменник показника теоретично не обгрунтований, їх називають відносними умовними деформаціями і позначають буквою ε з індексом тієї осі, вздовж якої відбувається зміна розміру:
εx = Δl/l0, εy = Δb/b0 , εz = Δh/h0. (50)
Відносні деформації - безрозмірні величини.
При збільшенні довжини ребра деформацію вважають позитивною, при зменшенні - негативною. Позитивному зрушенню відповідає зменшення кута між позитивними напрямками осей координат. При лінійних деформаціях пружно змінюється об’єм і форма частки (пружно або пластично), при зсувних змінюється тільки форма. На головних площадках зрушення відсутні.
Якщо розглянути куб з розмірами ребер, рівними одиниці, то зміна об’єму в результаті деформації θ складе:
θ = (1+ εx) (1 + εу) (1 + εz) – 1 = 1 + εx + εy + εz + εxεy + εyεz+ εzεx + εxεyεz – 1=
= εx + εy + εz + εxεy + εyεz+ εzεx + εxεyεz.
Враховуючи, що розглядаються малі деформації, можна знехтувати добутком показників. Тоді зміна об’єму становитиме
θ = εx + εy + εz.
Відповідно до гіпотези суцільності об'єм при деформації не змінюється, отже
εx + εy + εz = 0. (51)
Сума показників, взятих уздовж кожної осі, дорівнює нулю, знак однієї з деформацій завжди протилежний знаку двох інших. Одні ребра подовжуються, інші при цьому коротшають незалежно від знаку і схеми дії прикладених напружень.
Для позначення зсувних деформацій γ на площадкау потрібно використовувати два індекси. Перший показує, від якої осі відхилилося ребро, другий - у напрямку якої осі (Рис.14). Так, зрушення на Рис.14, а слід позначити γxz, а такий же за величиною зрушення, показаний на Рис.14,б
- γzx.
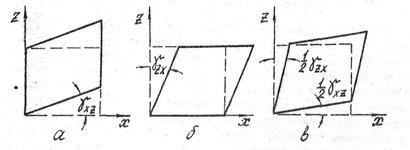
Рис.14. Представлення зсувних деформацій
Можна прийняти і протилежний підхід до індексації зрушень, тоді треба змінити і порядок розташування індексів дотичних напружень; прийнята система індексації повинна дотримуватися у всіх випадках.
Найбільш зручно розглядати тіж зрушення на даній площадці у вигляді суми двох половинних кутів (Рис.14, в)
γxz = γzx = γxz/2 + γzx/2.
Завдяки такому підходу отримуємо 9 компонент деформації - три лінійних і 6 зсувних. Лінійні деформації відповідають нормальним напруженням, зсувні - дотичним, всі вони мають однакові між собою індекси, а зрушення попарно рівні між собою, як і дотичні напруги з однаковими індексами. Розташуємо всі компоненти деформації у вигляді таблиці, аналогічно тензору напружень.
Tε =  (52)
(52)
Ця таблиця представляє собою симетричний тензор малих деформацій другого рангу. Так як тензор симетричний, можна використовувати спрощену запис
Tε =  (52, а)
(52, а)








