 2020-05-11
2020-05-11 308
308Техническое задание.
Данные на курсовую работу.
Вариант 7.
| Номинальный момент | 
| 
| 47.7 |
| Номинальная частота вращения | 
| 
| 600 |
| Номинальная мощность | 
| 
| 3 |
| Номинальное напряжение якоря | 
| 
| 70 |
| Номинальный ток якоря | 
| 
| 50 |
| Максимальная частота вращения | 
|
| 2000 |
| Электромеханическая постоянная времени | 
| 
| 12.3 |
| Электромагнитная постоянная времени | 
|
| 7.85 |
| Метод настройки | ТО | ||
Дать краткое описание системы двигателя постоянного тока.
Рассчитать и построить статические характеристики САУ.
Настроить систему на ТО.
Рассчитать и построить переходные процессы тока и скорости при управляющем воздействии и возмущающем воздействии.
Теоретическая часть
Описание САУ постоянного тока.
Системы управления разделяются на разомкнутые и замкнутые системы. Управление по разомкнутому циклу осуществляется без контроля результата.

Рис. 1 Функциональная схема разомкнутой САУ
Такое управление называется жестким. Разомкнутые системы применяются для стабилизации и программного управления. Здесь ЗУ - задающее устройство; У - усилитель; ИУ - исполнительное устройство; g - задающее воздействие; U - управляющее воздействие; Y - выходная величина; F - возмущающее воздействие.
Задающее устройство вырабатывает задающее воздействие g, в соответствии, с которым устанавливается управляющее воздействие U. Управляющим называется воздействие, которое вырабатывает исполнительное устройство (исполнительный элемент). Это воздействие поступает на объект управления и определяет значение выходной величины. На объект управления кроме управляющего всегда действует другое воздействие, называемое возмущающим. Возмущающих воздействий может быть несколько. Возмущающее воздействие нарушает связь между управляющим воздействием и выходной величиной объекта. При постоянном задающем воздействии g изменение возмущающего воздействия F вызывает изменение выходной величины Y. Большинство устройств систем управления являются инерционными.

Рис. 2. - Изменение выходных величин объекта при изменении возмущающего воздействия. Нагрузочная характеристика САУ.
Установившийся режим работы наступает лишь по истечении некоторого времени. В установившемся режиме работы свойства системы можно охарактеризовать с помощью нагрузочной характеристики. Нагрузочная характеристика представляет собой зависимость выходной величины системы от возмущающего воздействия  . В разомкнутой системе нагрузочная характеристика - это характеристика объекта. Она не зависит от других элементов (усилителя, исполнительного устройства). Любые изменения возмущающего воздействия вызывают изменения выходной величины. Разомкнутую систему можно оценить по величине отклонения выходного сигнала
. В разомкнутой системе нагрузочная характеристика - это характеристика объекта. Она не зависит от других элементов (усилителя, исполнительного устройства). Любые изменения возмущающего воздействия вызывают изменения выходной величины. Разомкнутую систему можно оценить по величине отклонения выходного сигнала  под влиянием возмущающего воздействия F.
под влиянием возмущающего воздействия F.
В замкнутых САР управляющее воздействие формируется в непосредственной зависимости от управляемой величины.

Рис. 3 – Функциональная схема замкнутой САР.
В замкнутой системе сигнал с выхода датчика Д, измеряющего выходную величину, поступает на вход системы. Такая связь входа системы с его выходом называется обратной связью. Сигнал на входе усилителя равен  .
.
Здесь  - отклонение сигнала обратной связи
- отклонение сигнала обратной связи  от задающего воздействия. Если из задающего воздействия g вычитать выходную величину Y, то
от задающего воздействия. Если из задающего воздействия g вычитать выходную величину Y, то  будет представлять отклонение регулируемой величины от заданного значения.
будет представлять отклонение регулируемой величины от заданного значения.
Рассмотрим, как могут изменяться координаты системы: - отклонение, U - управляющее воздействие, Y - выходная величина при включении системы в работу и при изменении возмущающего воздействия F.

Рис. 4 – Изменение координат системы.
Будем полагать, что зависимости получены при коэффициенте усиления усилителя k1. Работу системы можно описать следующим образом. При включении системы, когда  = 0, величина отклонения ε имеет максимальное значение. Управляющее воздействие U начинает увеличиваться, вследствие чего увеличивается выходная величина Y. По мере увеличения Y отклонение ε уменьшается и наступает установившийся режим работы. Увеличение F вызывает уменьшение выходной величины Y и увеличение отклонения ε, что приводит к увеличению управляющего воздействия U и, следовательно, к увеличению выходной величины.
= 0, величина отклонения ε имеет максимальное значение. Управляющее воздействие U начинает увеличиваться, вследствие чего увеличивается выходная величина Y. По мере увеличения Y отклонение ε уменьшается и наступает установившийся режим работы. Увеличение F вызывает уменьшение выходной величины Y и увеличение отклонения ε, что приводит к увеличению управляющего воздействия U и, следовательно, к увеличению выходной величины.
Однако Y не может достичь прежнего значения, так как увеличение управляющего воздействия возможно лишь при увеличении . Увеличим коэффициент усиления усилителя. Пусть k2 > k1. Рассмотрим изменение координат в этом случае.
В замкнутой системе управляющее воздействие U формируется в функции отклонения ε. Замкнутые системы называются системами автоматического регулирования по отклонению.
В замкнутой системе регулирования, выбирая необходимое значение коэффициента усиления можно получить требуемую нагрузочную характеристику. В рассмотренной системе с увеличением возмущающего воздействия уменьшается выходная величина. Каждому новому значению возмущающего воздействия соответствует новое значение выходной величины. Такое регулирование называется статическим. Система автоматического регулирования, имеющая подобную нагрузочную характеристику, называется статической системой.
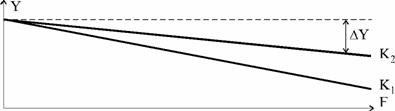
Рис. 5 – Нагрузочные характеристики замкнутой САУ.
В замкнутой системе отклонение равно . Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
При изображении систем управления применяют два принципа функциональный и структурный принцип и соответственно схемы подразделяются на функциональные и структурные схемы.
Расчёт статических характеристик системы








