 2020-05-12
2020-05-12 148
148


Подсистема приводов
Подсистема приводов включает в себя различные двигатели и винтовые передачи для окончательного выполнения команд подсистемы управления — для реализации перемещения исполнительных органов станка.
v Высокоточные ходовые винты
v Двигатели
Шаговый электродвигатель - это электромеханическое устройство, преобразующее электрический сигнал управления в дискретное механическое перемещение.
Существует несколько основных видов шаговых двигателей, отличающихся конструктивным исполнением:
• Шаговые двигатели с переменным магнитным сопротивлением
• Шаговые двигатели с постоянным магнитным сопротивлением
• Гибридные двигатели.
Принцип работы у всех этих двигателей примерно одинаков и достаточно прост.
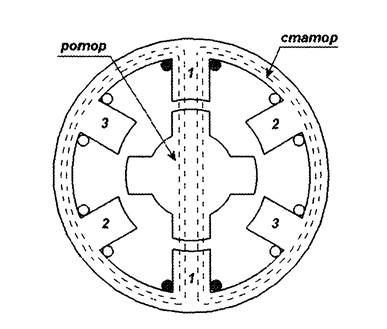
Устройство шагового двигателя с переменным магнитным сопротивлением
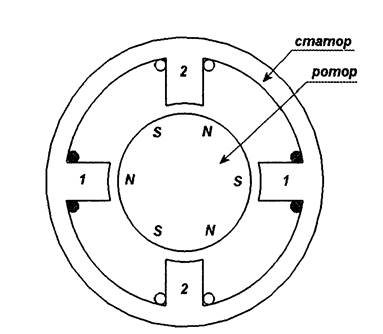
Устройство шагового двигателя с постоянными магнитами
Когда подсистема управления посылает шаговому двигателю электрический импульс, то происходит поворот на определенный угол, который зависит от конструкции двигателя (например, 0.7 град.). Если ходовой винт имеет шаг 1 мм, то один импульс заставит исполнительный орган станка линейно переместиться на:
0.7/360 Х 1=0.0019 мм
Эта величина называется разрешением системы или ценой импульса. Нельзя переместить исполнительный орган на величину меньшую, чем разрешение системы. Таким образом, вы видите, что существует прямая взаимосвязь между двигателем, ходовым винтом и точностью перемещений станка.








