 2020-05-13
2020-05-13 137
137РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОМУ ПРОЕКТУ
ПО ТЕОРИИ МЕХАНИЗМОВ И МАШИН
«Исследование плоского механизма»
Выполнил студент
_______________________
группа _______________
Проверил
__________________________
Волгоград 20___ г
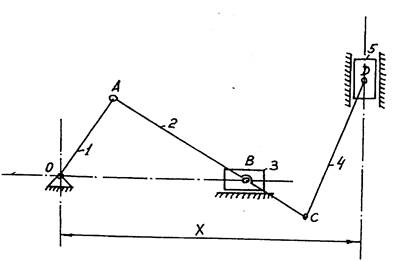
Кинематическая схема механизма.

Структурное исследование механизма.
Число степеней подвижности механизма определяем по формуле Чебышева.

Так как данный механизм плоский и все кинематические пары 5 класс, то
 , где n- число звеньев, p5- число кинематических пар 5 класса.
, где n- число звеньев, p5- число кинематических пар 5 класса.
Выделим группы Ассура (группы, степень подвижности которых равна нулю.)
 |
По классификации И.И.Артоболевского – это группа 2-го класса, 2-го порядка, 2-ой модификации.
 Группа 2-го класса, 2-го порядка, 1-ой модификации
Группа 2-го класса, 2-го порядка, 1-ой модификации
 |
Механизм 1-го класса
Записываем формулу строения механизма:

механизм второго класса.
КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМА
Масштаб схемы.
Построение планов скоростей
1. Определяем скорость точки  кривошипа:
кривошипа:


2. Определяем масштаб плана скоростей:
3. Определяем скорость точки  , для этого рассмотрим движение точки относительно точки и относительно точки
, для этого рассмотрим движение точки относительно точки и относительно точки  :
:

4. Для нахождения скорости точки С составляем пропорцию;
 ;
;
 - замеряется со схемы механизма.
- замеряется со схемы механизма.
5. Определяем скорость точки D, для этого рассмотрим движение точки D относительно точки C:
6. Определяем угловую скорость второго звена;
 где
где  - скорость точки в её вращательном движении относительно точки ,
- скорость точки в её вращательном движении относительно точки ,  ;
; 
7. Определяем угловую скорость 4-го звена; 
Полученные значения сводим в табл.1
Таблица 1
| Значения скоростей точек механизма в м/с и угловых скоростей его звеньев в рад/с | |||||||||||
| № | VA | VBA | VB | VE3 | VD | VE45,E3 | VE45,Д | VE45 | ω2 | ω3 | ω5 |
| 0 | 9,4 | 9,4 | 0,0 | 0,0 | 6,4 | 0,0 | 5,2 | 0,0 | 0,0 | 0,0 | 10,5 |
| 1 | 2,4 | 7,7 | 9,7 | 8,6 | 1,8 | 1,4 | 9,9 | 3,4 | 15,4 | 2,9 | |
| 2 | 0,4 | 9,6 | 13,0 | 9,6 | 3,5 | 5,1 | 13,5 | 0,6 | 19,2 | 10,3 | |
| 3 | 2,9 | 9,4 | 71,2 | 9,4 | 5,1 | 8,1 | 15,1 | 3,3 | 18,9 | 16,2 | |
| 4 | 4,1 | 7,8 | 12,7 | 8,6 | 4,1 | 8,2 | 13,9 | 5,8 | 15,6 | 16,4 | |
| 5 | 6,7 | 5,6 | 9,7 | 7,3 | 0,7 | 5,7 | 9,8 | 9,6 | 11,1 | 11,4 | |
Построение планов ускорений.
1. Определяем ускорение точки кривошипа:
 т.к.
т.к.  , тогда:
, тогда:

2. Определяем масштаб плана ускорений;

Из полюса  откладываем параллельно звену
откладываем параллельно звену  , вектор ускорения точки
, вектор ускорения точки  длиной
длиной  .
.
3. Определяем ускорение точки , для этого рассмотрим движение точки  относительно точки и относительно точки :
относительно точки и относительно точки :
где  - вектор нормального ускорения точки , в её вращательном движении относительно точки , направлен по звену
- вектор нормального ускорения точки , в её вращательном движении относительно точки , направлен по звену  , от точки в сторону точки ;
, от точки в сторону точки ;
 , тогда длина вектора на плане ускорений определится как
, тогда длина вектора на плане ускорений определится как

 - вектор ускорения точки , в её вращательном движении относительно точки , направлен по звену
- вектор ускорения точки , в её вращательном движении относительно точки , направлен по звену  , от точки в сторону точки ;
, от точки в сторону точки ;
 , тогда длина вектора на плане ускорений определится как
, тогда длина вектора на плане ускорений определится как

4. Для нахождения ускорения точки С составляем пропорцию;
 ;
;
4. Определяем ускорение точки D,
5.Определяем угловое ускорение второго звена.
 где
где  - тангенциальная составляющая ускорения точки
- тангенциальная составляющая ускорения точки  в её вращательном движении относительно точки
в её вращательном движении относительно точки  ,
, 
8.Определяем угловое ускорение четвертого звена.
Полученные значения сводим в табл.2
Таблица 2
| Значения ускорений точек механизма в м/с2 и угловых ускорений его звеньев в рад/с2 | |||||||||||||||
| № | 
| 
| 
| 
| 
| 
| 
| 
|
|
| 
| 
| 
| 
| 
|
| 1 | 297,7 | 251,3 | 251,3 | 318,7 | 344,3 | 7,9 | 118,0 | 4,1 | 56,5 | 240,4 | 221,9 | 259,7 | 343,4 | 443,8 | 519,4 |
| 4 | 178,2 | 237,6 | 290,4 | 363 | 23,5 | 121,7 | 134,5 | 127,9 | 132 | 118,8 | 79,2 | 188,5 | 237,6 | 158,4 | |

Построение кинематических диаграмм.
Кинематическая диаграмма представляет собой графическое изображение изменения одного из кинематических параметров (перемещения, скорости и ускорения) точки либо звена исследуемого механизма в функции времени, угла поворота или перемещения ведущего звена.








