 2020-05-11
2020-05-11 620
620При организации перевозочного процесса объектом управления является локальная подвижная система автомобиль — водитель, которая работает в условиях постоянно меняющихся ситуаций по месту работы и времени. Для эффективного контроля работы АТС на линии необходимо наличие оперативной информации о режиме работы ПС. Для этого используют методы слежения (vehicle tracking) и трассирования (vehicle tracing) АТС, которые часто заменяются одним понятием контроля работы АТС. Это связано с тем, что, как правило, использование только одного метода не позволяет определить местоположение АТС с высокой точностью и надежностью. На практике используют комбинацию методов на основе различных датчиков, классификация которых приведена на рис. 10.5.
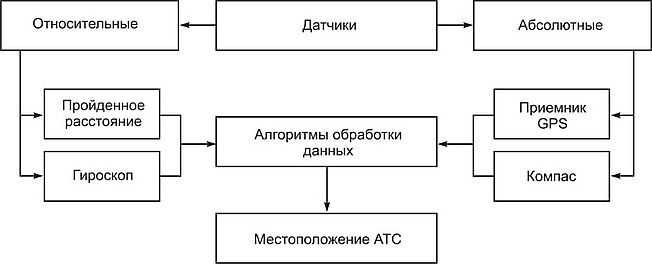
Классификация датчиков, используемых для определения местоположения автотранспортных средств
Абсолютное определение местоположения АТС позволяет получить данные о географической широте и долготе, скорости и времени измерения, но требует наличия соответствующей инфраструктуры в виде космической или наземной навигационной инфрастуктуры, средств связи и т.
Использование датчиков относительного местоположения от АТП представляет собой наиболее простое решение
1) слежение — систематический мониторинг и запись текущей позиции и состояния АТС;
2) трассирование — деятельность по поиску текущей позиции АТС путем реконструкции его маршрута.
Основной недостаток использования датчиков заключается в суммировании погрешностей при каждом измерении. Избежать этого можно за счет уменьшения интервала между началом нового измерения. Для этого используют датчики абсолютного положения АТС. Для маршрутных автобусов начальной точкой отсчета может являться остановочный пункт, местоположение которого заранее известно.
Для внесения коррективов в план работы необходима связь с водителем, находящимся на маршруте, что может быть обеспечено при оснащении ПС аппаратурой, позволяющей водителям и диспетчерам в любой момент времени контактировать друг с другом для обмена информацией.
В табл. 10.1 приведены основные характеристики средств мобильной связи, которые могут быть использованы для контроля работы ПС на линии.
Таблица 10.1. Характеристики средств мобильной связи
| Связь | Область использования | Зона действия |
| Пейджинговая | Передача текстовых сообщений водителю | Может действовать при использовании роуминга в крупных городах |
| Радиосвязь | Передача текстовых сообщений водителю | Дальность действия 10—80 км в зависимости от оборудования; может быть расширена при наличии ретрансляторов и радиосетей |
| Радиальная | Голосовая связь между АТС и с АТО | Может действовать более чем в 120 городах России |
| Сотовая | Голосовая, факсимильная и компьютерная связь между АТС и с АТО | Может действовать при использовании роуминга в большинстве городов и территорий |
| Спутниковая | То же | Любая точка земного шара, кроме полюсов |
На основе такого оборудования возможно создание информационной системы мониторинга для постоянного контроля работы АТС, учитывающей следующее:
• определение местоположения АТС в любой момент времени при движении по маршруту с передачей данных в диспетчерскую;
• немедленная передача информации в диспетчерскую о нарушении сохранности груза и неисправностях АТС;
• постоянная информационная связь водителя с диспетчерской, что позволит осуществлять оптимизацию перевозок, информирование водителей об изменениях маршрута, необходимости перевозки попутных грузов, обслуживании новых клиентов, предупреждение о дорожных условиях, возможных опасностях.








