 2020-06-12
2020-06-12 204
204
1. Изучить теоретические сведения.
2. Смоделировать в Simulink-модель стабилизации курса.
3. На вход системы задать курс в 10 град.
4. Построить временную характеристику выходного сигнала.
5.Написать дифференциальное уравнение замкнутой системы.
6. Провести автоматическую и ручную настройку ПИД-регулятора.
7. Добавить в разработанную модель постоянное возмущение в 2 град.
8. Построить выходную временную характеристику.
9. Определить прямые показатели качества переходных процессов.
10. Провести настройку ПИД-регулятора и сравнить временную характеристику с характеристикой системы с ПД-регулятором.
11. Подготовить ответы на контрольные вопросы.
12. Оформить отчет.
Методический пример
Смоделируем Simulink-модель курса судна со следующими параметрами: коэффициентом передачи судна, постоянной времени судна, постоянной времени двигателя, и постоянной времени обратной связи:

На рисунке 9.2 представлена модель судна без регулятора.
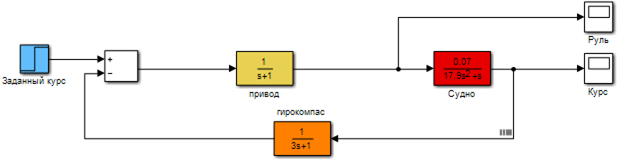
Рис. 9.2. Simulink-модель судна без регулятора
Чтобы нарисовать график необходимо в настройках осциллографов «Руль» и «Курс» поставить названия переменных: «delta», «phi», затем с помощью скрипта представить переходные характеристики (см. рис. 9.):
subplot(2, 1, 1);
plot(phi(:,1), phi(:,2)),grid;
title('Курс');
xlabel('Время, сек');
ylabel('\phi, градусы');
subplot(2, 1, 2);
plot(delta(:,1), delta(:,2)),grid;
title('Руль');
xlabel('Время, сек');
ylabel('\delta, градусы');
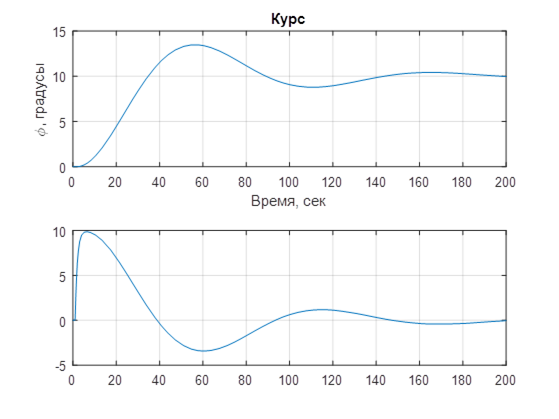
Рис. 9.4. Переходные характеристики системы управления без регулятора
Как видно на рис. 9.4, перерегулирование равно более 10 %, что является неприемлемо для данной системы управления. Настроим вручную ПИД-регулятор для качественной работы системы. Simulink-модель с ПИД регулятором представлена на рис. 9.5. Сруктура ПИД-регулятора представлена на рис. 9.6.
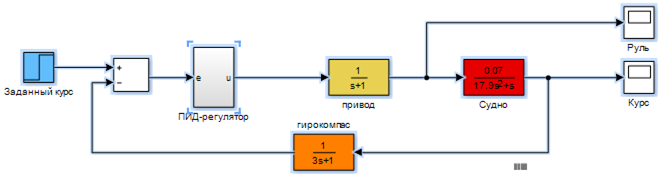
Рис. 9.5. Simulink-модель судна с ПИД-регулятором
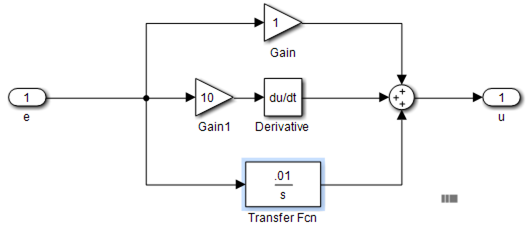
Рис. 9.6. Сруктура ПИД-регулятора
Результаты ручной настройки регулятора представлены на рис. 9.7.
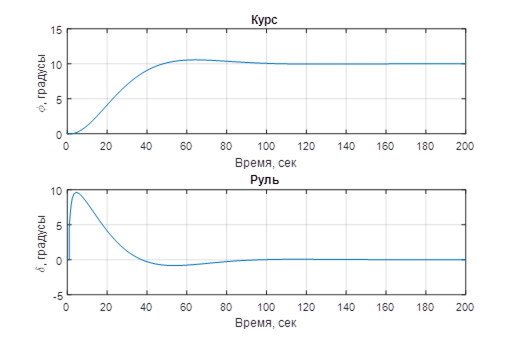
Рис. 9.7. Переходные характеристики системы управления с ПИД-регулятором
Настроим ПИД-регулятор автоматически, для этого вместо настроенного вручную ПИД-регулятора поставим из библиотеке элементов «PID Controller», Simulink-модель будет иметь вид (см. рис. 9.8).
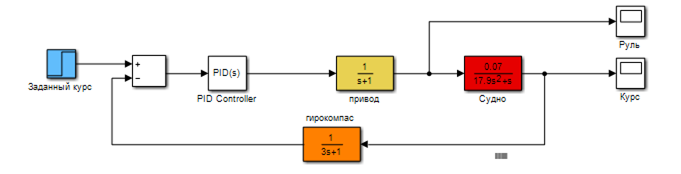
Рис. 9.8. Simulink-модель судна с ПИД-регулятором
При нажатии кнопки «Tune…» происходит автоматическая настройка регулятора. Переходные процессы, полученные при атоматической настройке представлены на рис. 9.9.
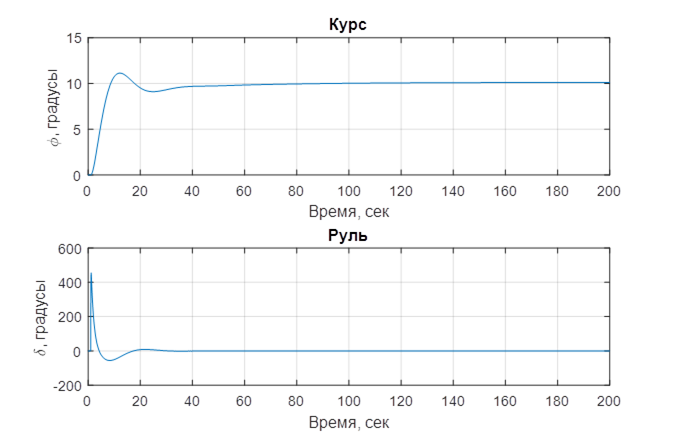
Рис. 9.9. Переходные процессы настроенной системы
Анализ рис. 9.9 показывает, что время переходного процесса составляет 70 с, перерегулирование составило 10 %.
Предположем что на судно оказывает воздействие ветер, который отклоняет судно на два градуса в сторону. Simulink-модель с таким воздействием представлена на рис. 9.10.
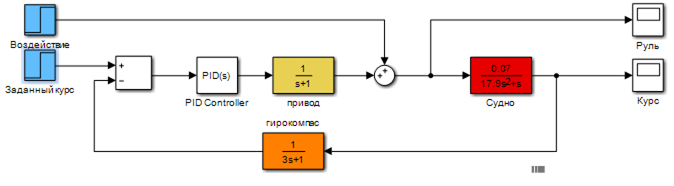
Рис. 9.10. Simulink-модель системы управления с водействием
По переходным характеристикам системы можно сделать вывод, что при воздействии возникает статическая ошибка управления (рис. 9.11).
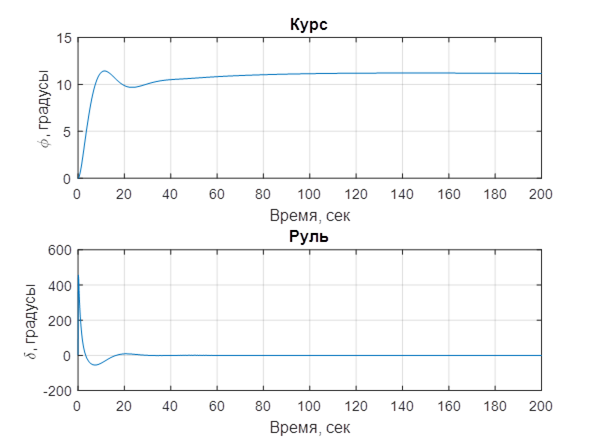
Рис. 9.11. Переходные процессы системы с воздействием
Для устранения статической ошибки необходимо подстроить ПИД-регулятор. Устранить данную ошибку позволит изменение интегрирующей составляющей. На рис. 9.12 переходные процессы после поднастройки ПИД-регулятора.
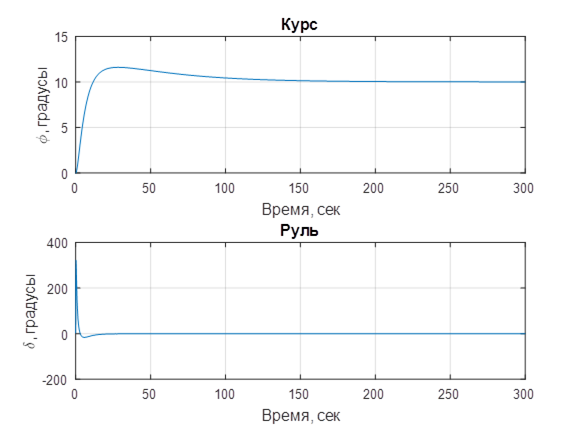
Рис. 9.12. Переходные процессы системы с ПИД-регулятором
и возмущающим воздействием
Контрольные вопросы
1. Почему при использовании ПД-регулятора система не компенсирует постоянное возмущение?
2. Как, зная статический коэффициент усиления по возмущению, определить установившееся отклонение от заданного курса?
3. Какими свойствами должна обладать передаточная функция по возмущению для того, чтобы постоянное возмущение полностью компенсировалось?
4. Какими свойствами должен обладать регулятор для того, чтобы постоянное возмущение полностью компенсировалось?
5. Какие преимущества дает использование интегрального канала в ПИД-регуляторе?
6. Что такое ПИД-регулятор?
Содержание отчета
– титульный лист;
– краткие теоретические сведения;
– дифференциальные уравнения системы;
– результаты моделирования;
– прямые показатели качества переходных процессов;
– ответы на контрольные вопросы;
– выводы по каждому пункту работы.
Лабораторная работа № 10. АНАЛИЗ И СИНТЕЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕТОДОМ КОРНЕВОГО ГОДОГРАФА
Цель работы – учение методики построения корневых годографов для анализа и синтеза линейных систем автоматического управления.








