 2020-06-12
2020-06-12 485
4853. Следящие системы - изменение выходной величины путем слежения за произвольно изменяемым во времени входным управляющим воздействием. Примеры систем - управление самонаводящихся ракет-перехватчиков, управление технологическим процессом загрузки конверторов в металлургическом производстве.
4. Адаптивные системы - изменение выходной величины по заранее неизвестному закону (правилу) методом пробных управляющих воздействий с учетом изменения среды и с оценкой результатов воздействий по определенным параметрам. Например, изменение цены товара в магазине в зависимости от спроса и цены аналогичных товаров в ближайших окрестностях с оптимизацией по максимуму прибыльности.
Задающее воздействие в системах стабилизации неизменно, в системах программного управления — известная функция времени, в следящих и адаптивных системах — произвольная функция времени.
Активные и пассивные системы. Разделение систем на эти две группы производится по особенностям функций управления системами.
Для пассивной статической системы зависимость y = G(u) является, фактически, моделью системы, отражающей законы ее функционирования. Для пассивной динамической системы эта зависимость может являться решением системы дифференциальных уравнений, для "черного ящика" – таблицей результатов эксперимента (эталонирования), и т.д.
Общим для всех пассивных систем является их детерминированность, отсутствие у управляемого объекта свободы выбора своего состояния, собственных целей и средств их достижения. Пассивные системы относятся, как правило, к числу технических и технологических. Управление объектами с помощью технических средств без участия человека называется автоматическим управлением. Совокупность объектов управления и средств автоматического управления называется системой автоматического управления (САУ).
В активных системах управляемые субъекты (хотя бы один) обладают свойством активности, свободой выбора своего состояния. Помимо возможности выбора состояния, элементы активный систем обладают собственными интересами и предпочтениями, то есть могут осуществлять выбор состояния целенаправленно. Соответственно модель системы G(u) должна учитывать проявления активности управляемых субъектов. Считается, что управляемые субъекты стремятся к выбору таких состояний, которые являются наилучшими при заданных управляющих воздействиях, а управляющие воздействия, в свою очередь, зависят от состояний управляемых субъектов. Если управляющий орган имеет модель реальной активной системы, которая адекватно описывает ее поведение, то задача управления сводится к выбору оптимального управления, максимизирующего эффективность работы системы. В своем большинстве активные системы принадлежат к областям управления человеческими коллективами.
Субъекты и объекты управления. Сущность всякого управления состоит в организации и реализации целенаправленного воздействия на объект управления и представляет собой процесс выработки и осуществления операции воздействия на объект в целях перевода его в новое качественное состояние или поддержания в установленном режиме. Субъект управления – это устройство, которое осуществляет управление (или тот, кто управляет). Объект управления – это устройство или процесс, на который направляется управляющее воздействие (или тот, кем управляют).
Под объектом управления (ОУ) понимается любой объект, технологический процесс, производственная организация или коллектив людей, выделенный из окружающей среды по определенным признакам (конструктивным, функциональным, и пр.) и представляющий собой динамическую систему произвольной природы, изменяющую свое состояние под влиянием внешних воздействий. Для достижения определенных желаемых результатов функционирования ОУ необходимы и допустимы специально организованные воздействия. В зависимости от свойств и назначения объектов управления могут быть выделены технические, технологические, экономические, организационные, социальные и другие объекты и комплексы объектов.
Объект управления выделяется из окружающей среды таким образом, чтобы выполнялись минимум два условия:
- на объект можно воздействовать,
- это воздействие изменяет его состояние в определенном направлении.
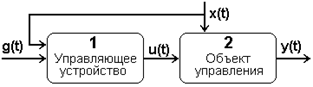
Внешние связи объекта управления показаны на рис. 1.2.2, где Х – канал воздействия среды на объект, Y – канал воздействия объекта на среду, U – канал воздействия управления на объект. Понятие "воздействие" в теории управления рассматривается в информационном смысле.
|
Рис.1.2.2. Система управления. |

Операция управления реализуется управляющим устройством (УУ). Обобщенная структура взаимодействия управляющего устройства с объектом управления, образующая систему управления, приведена на рис. 1.2.2. Управляющее устройство системы на основании задающего воздействия g(t), определяющим закон (алгоритм) управления выходной величины объекта управления, вырабатывает управляющее воздействие u(t) на ОУ и поддерживает на заданном уровне или изменяет по определенному закону на выходе ОУ выходную величину y(t).
В общем случае, большинство объектов управления являются многомерными и характеризуются некоторыми векторами фазовых координат:
Y(t) = (y1, y2, …, yn),
составляющие которого могут иметь различную физическую природу. Для таких систем внешние воздействия также могут определяться многомерным вектором управления:
U(t) = (u1, u2, …, um).
Координаты управления uj(t) могут быть непрерывными функциями времени или иметь разрывы первого рода, в связи с чем они подразделяются на кусочно-непрерывные (с разрывами первого рода), на кусочно-гладкие (с разрывами первого рода для первой производной), и на гладкие с непрерывными первыми производными. В отличие от координат управления координаты состояния yj(t) являются гладкими или кусочно-гладкими, так как представляют собой выходные величины некоторых динамических элементов и могут изменяться только с ограниченной скоростью.
На ОУ могут действовать внешние возмущающие воздействия X(t) различной природы. Выделяют основные возмущения, существенно влияющие на регулируемую величину, и помехи (шумы), имеющие статистический характер и изменяющие Y(t) в допустимых границах (по значению или по точности). Основные возмущения, как правило, в определенной степени учитываются (компенсируются) управляющим устройством. Система может иметь обратную связь уос(t) с выхода ОУ на вход УУ, которая при формировании сигнала управления u(t) учитывает предшествующие значения (состояния) y(t).
Величины X, U, Y в динамических объектах связаны дифференциальными, интегральными или разностными уравнениями.
Системы автоматического управления (САУ) производственных процессов, как правило, представляют собой замкнутую структуру. Выходной величиной ОУ САУ является обычно главный технологический параметр объекта (скорость, мощность, и т.п.).
Методы управления - это набор способов, приемов, средств воздействия на управляемый объект. По содержанию воздействия на объект управления методы обычно делятся на технические, технологические, программные и прочие в производственных системах автоматического управления, и организационные, экономические, и другие в хозяйственных и корпоративных системах.
Методы управления в производственных системах определяются техническими параметрами управляемых объектов, в хозяйственных и корпоративных системах – структурой систем и целевыми задачами управления.
Управляющие параметры. В математических моделях управления используются различные виды переменных. Одни из них описывают состояние системы, другие – выход системы, т.е. результаты ее работы, третьи – управляющие воздействия. Выделяют экзогенные переменные, значения которых определяются извне, и эндогенные переменные, используемые только для описания процессов внутри системы.
Управляющие параметры – часть экзогенных. Задавая их значения (или изменения этих переменных во времени), можно изменять выход системы в нужную для себя сторону.
Пространство состояний объекта управления или фазовое пространство Q(yj, tn) в общем случае является многомерным математическим пространством. На рис. 1.2.3 приведен условный график фазового пространства для трех переменных состояний yj.
|
Рис. 1.2.3. |

Допустим, что в некоторый начальный момент времени t0 (обычно t0=0) вектор состояния объекта управления равен Y(t0), а объект управления описывается в пространстве состояний уравнением вида:
Q(t) = Ф[Y(t), U(t), X(t), t].
Приложим к объекту конкретные воздействия U(t) и Х(t) и решим уравнение при начальных условиях Y(t0). Полученному решению Y(t, U(t), X(t), y(t0)), t≥t0 , которое зависит от всех воздействий и начальных условий, при каждом t в пространстве состояний будет соответствовать определенная точка. Кривую, соединяющую эти точки, называют траекторией движения объекта. Условно можно принять, что изображающая точка во времени движется в пространстве состояний, а оставляемый ею след и представляет собой траекторию движения объекта.
Из-за конструктивных, прочностных, энергетических и других особенностей объекта на его вход не могут подаваться произвольные управления. Реальные управления подчинены некоторым ограничениям, совокупность которых формирует область возможных допустимых значений U(t) ∈ W(t). Аналогично компоненты вектора состояния Y(t) в общем случае также должны удовлетворять определенным ограничениям, т.е. вектор Y(t) в пространстве состояний не должен выходить за пределы некоторой области Q, называемой областью допустимых состояний.
Пусть в области Q можно выделить некоторую подобласть состояний Qc, которые являются желательными. Цель управления заключается в том, чтобы перевести объект из начального состояния Y(t0) в конечное состояние Y(tk), принадлежащее подобласти Qc, т.е.Y(tk) ∈ Qc. Для достижения цели управления на вход объекта необходимо подать соответствующее управление. Задача управления заключается в том, чтобы в области допустимых управлений подобрать такое значение, при котором достигнута цель. Иными словами требуется отыскать такое допустимое управление U(t) ∈ W(U), определенное на временном отрезке [t0, tk], при котором уравнение объекта при заданном начальном состоянии и известном векторе X(t) имеет решение Y(t), удовлетворяющее ограничению Y(t) ∈ Q(Y) при всех t ∈ [t0, tk] и конечному условию X(tk) ∈ Qc..
1.3. КЛАССИФИКАЦИЯ СИСТЕМ УПРАВЛЕНИЯ [2, 5, 8, 11, 12].
Все многообразие систем управления можно разделить на классы по различным признакам, важнейшими из которых являются цель управления, вид структуры, вид и размерность математической модели, характер сигналов, характер параметров, характер внешних воздействий. Согласно этим признакам будем различать:
- системы стабилизации, программного управления, следящие системы;
- системы разомкнутые, замкнутые или комбинированной структуры;
- модели линейные, нелинейные, скалярные и векторные;
- системы непрерывные, дискретные или гармонически модулированные;
- системы стационарные и нестационарные, с сосредоточенными или распределенными параметрами;
- системы с детерминированными или стохастическими воздействиями.
Практическая классификация систем управления обычно строится на основе применяемых принципов управления и осуществления управляющих воздействий.
Принципы управления. Выделяют три фундаментальных принципа создания систем управления: разомкнутое управление, компенсирующее управление и управление с обратной связью (замкнутое управление).
При разомкнутом управлении программа управления жестко задана в УУ и влияние возмущений на параметры процессов не учитывается. Примерами таких систем являются часы, магнитофон, компьютер, и т.п. Разомкнутое регулирование применяется при наличии двух условий:
- достаточной информации о свойствах объекта и их постоянстве в процессе работы;
- незначительном уровне помех или их полном отсутствии.
|
Рис. 1.3.1. |

В простых разомкнутых системах (рис. 1.3.1) управляющее воздействие u(t) формируется управляющим устройством как функция задающего или возмущающего воздействия. Если известна модель объекта у = G(u, x) в алгебраической или дифференциальной форме и известна необходимая реакция у(t), то решается обратная задача u(t) = Y(у(t), x(t)) и определяется управление, которое необходимо для реализации реакции объекта 2. Найденный закон управления u(t) реализуется регулятором 1. Однако такое управление можно реализовать в том случае, если x(t) = const.
Для уменьшения или устранения отклонения управляемой величины от требуемого значения, вызываемого влиянием того или иного фактора, необходимо, чтобы управляющее воздействие было определенной функцией этого фактора и характеристик объекта.
|
Рис. 1.3.2. |
На рис. 1.3.2 представлена структура, реализующая принцип управления по возмущению, которая применяется при x(t) = var, но величина x(t) поддается измерению и ее значение может подаваться на вход управляющего устройства, обеспечивая соответствующую реакцию воздействия u(t) на изменения значения x(t).
Принцип управления по возмущению состоит в том, что для уменьшения или устранения отклонения sy(t) управляемой величины от требуемого значения, вызываемого возмущающим воздействием x(t), измеряется это воздействие и в результате его преобразования вырабатывается управляющее воздействие u(t), которое, будучи приложено к входу объекта управления 2, вызывает компенсирующее отклонение управляемой величины противоположного знака по сравнению с отклонением sy(t).
Основной недостаток разомкнутых систем - практическая невозможность иметь идеально точную модель системы у = G(u, x) с учетом всех действующих возмущений, равно как и измерять все регулярные и нерегулярные возмущения. Разомкнутые системы обычно не применяются для управления неустойчивыми объектами и объектами с изменяющимися параметрами.
Если воздействие возмущающих факторов может искажать выходную величину системы до недопустимых пределов, то применяют принцип компенсации с использованием корректирующего устройства. Для задания параметров коррекции должно проводиться изучение соответствующего возмущающего фактора или создаваться его математическая модель. Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п. Принцип компенсации обеспечивает быструю реакции на возмущения и более высокую эффективность управления, но, как правило, используется для компенсации только определенных дестабилизирующих факторов и не может защитить от всех возможных возмущений.
Наибольшее распространение в технике получило управление с обратной связью, при котором управляющее воздействие корректируется в зависимости от выходной величины y(t). Если значение y(t) отклоняется от требуемого, то происходит корректировка сигнала u(t) с целью уменьшения данного отклонения. Для выполнения данной операции выход ОУ соединяется с входом устройства управления главной обратной связью (ОС). Это самый дорогой вид управления, при этом канал обратной связи является наиболее уязвимым местом системы. При нарушении его работы система может стать неустойчивой или полностью неработоспособной.
|
Рис. 1.3.3. |

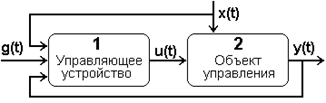
Структура замкнутых систем управления представлена на рис. 1.3.3. Управляющее воздействие u(t) формируется как функция рассогласования e(t) = g(t) - y(t) текущего значения управляемой переменной от требуемого задающего воздействия. Эта фундаментальная идея лежит в основе принципа управления по отклонению, который реализуется замкнутыми системами. Принцип управления по отклонению универсален, т. к. позволяет достигать цели управления независимо от причин рассогласования - изменения внутренних свойств объекта и внешних воздействий.
|
Рис. 1.3.4. |
Замкнутые системы позволяют решать все задачи управления: стабилизации, слежения и программного управления. Неустойчивые объекты могут быть управляемы только системами с замкнутыми структурами. Обобщением рассмотренных принципов управления является принцип комбинированного управления (рис. 1.3.4), который позволяет в замкнутой системе использовать и принцип управления по возмущению.
|
Рис. 1.3.5. |

Системы, способные изменять закон управления с целью осуществления наилучшего в некотором смысле качества управления независимо от внешних воздействий (рис. 1.3.5), используют принцип адаптации. Показатель качества обрабатывается устройством адаптации 3 для изменения структуры управляющего устройства или его параметров.
Отметим, что при введении обратной связи система управления становится инерционной. Поэтому часто применяют комбинацию обратной связи с принципом компенсации, что позволяет объединить достоинства обоих принципов: быстроту реакции на возмущение при компенсации и точность регулирования независимо от природы возмущений от обратной связи.
Методы классификации систем. В настоящее время существует достаточно много методов классификации систем управления. Отметим некоторые из них.
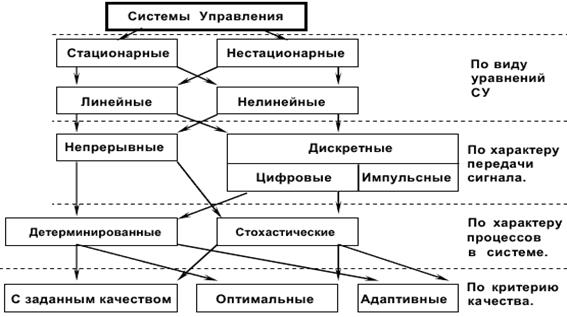
Наиболее общая классификация с позиций методов исследования систем, учитывающая способы математического описания, характер передачи сигналов, и характер протекания процессов в системах, приведена на рис. 1.3.6.
|
Рис. 1.3.6. |
Классификация систем по свойствам в установившемся режиме. По виду зависимости регулируемой величины от внешнего воздействия различают статические и астатические системы.
В статических системах регулируемая величина y(t) при постоянном задающем (возмущающем) воздействии по окончании переходного процесса принимает значение, пропорциональное воздействию, т.е. между входной и выходной величинами устройства имеется строго определенная функциональная связь y=f(u), которую принято называть статической характеристикой. В режиме холостого хода управляемая величина пропорциональна значению задающего воздействия uз, а наклон статической характеристики не зависит от uз. Обычно uз выбирают таким образом, чтобы управляемая величина точно соответствовала требуемому значению при номинальной нагрузке. Примером статической системы автоматического управления может служить электронный стабилизатор напряжения источника питания.
В астатических системах при внешнем воздействии по окончании переходного процесса значение регулируемой величины устанавливается равным заданному, т.е. система в установившемся режиме стремится к нулевому значению между заданным и текущим значением регулируемой величины. Если отклонение управляемой величины в установившемся режиме не зависит от возмущающего воздействия, то система является астатической к этому возмущающему воздействию. Если оно не зависит от задающего воздействия, то система астатическая по отношению к задающему воздействию.
По характеру работы функциональных узлов в составе систем управления выделяют линейные и нелинейные системы.
|
Рис. 1.3.7. |

В линейных системах между выходными и входными величинами существуют функциональные зависимости и выполняется принцип суперпозиции (реакция системы на сумму воздействий равна сумме реакций на каждое воздействие в отдельности). Процессы в системах описываются дифференциальными уравнениями. В зависимости от вида дифференциального уравнения линейные системы подразделяются на типы, приведенные на рис. 1.3.7.
В нелинейных системах хотя бы в одном звене системы нарушается принцип суперпозиции (линейность статической характеристики). В уравнениях динамики нелинейных систем присутствуют нелинейные функции (произведение переменных или их производных, степени переменных и т.п.). Возможности и качество управления в нелинейных системах значительно выше, чем в линейных.
Реальные системы управления обычно являются нелинейными и расчет систем достаточно сложен. С учетом хорошей разработанности теории линейных систем, нелинейные системы стремятся привести к линейным, используя методы линеаризации.
По степени использования информации во входных воздействиях системы делятся на адаптивные и неадаптивные.
Адаптивные системы обладают способностью приспосабливаться к изменению внешних условий и воздействий, а также повышать качество управления по мере накопления информации. Неадаптивные системы такими способностями не обладают и имеют постоянную настройку под определенные внешние условия и воздействия с ограниченным диапазоном их вариаций.
В последние десятилетия интенсивно разрабатывается новый класс систем управления - интеллектуальные системы управления (ИСУ). ИСУ строятся как самообучающиеся, самонастраивающиеся системы с гибкими процедурами принятия решений. Они способны формировать новые знания в процессе управления и функционирования, выступать в качестве экспертных систем, встроенных в контур управления, и работать в интерактивном режиме с лицом, принимающим решения.
Классификация по типам управления приведена на рис. 1.3.8.
|
Рис. 1.3.8. |

Процесс управления без участия человека, называется автоматическим. Устройство, обеспечивающее автоматическое управление объектом, называется системой автоматического управления (САУ). В тех случаях, когда система обеспечивает стабилизацию управляемой величины в заданных пределах, она называется системой автоматического регулирования (САР).
Под автоматизированным понимается управление объектом в системе с разомкнутой обратной связью с участием человека в выработке управляющих воздействий. Системы, реализующие такое управление, называются автоматизированными системами управления (АСУ). Если объекты управления относятся к типу технических, то системы управления называются автоматизированными системами управления технологическими процессами (АСУТП). Если объект управления является объектом производственно-экономического или социального характера, то система управления им относится к автоматизированным системам организационного управления (АСОУ).
В последние годы все более широко внедряется интегрированное управление, реализуемое интегрированными автоматизированными системами управления (ИАСУ). В ИАСУ объектами управления являются технические, производственно-экономические, организационные и социальные системы. ИАСУ создаются и функционируют на основе ЭВМ и экономико-математических методов, которые используются для управления техническими объектами, технологическими процессами, для планирования, контроля, анализа и регулирования производства в целом.
Систему автоматизированного проектирования (САПР) можно определить как интегрированную автоматизированную систему управления, объектом управления которой является процесс выбора проектно-конструкторских решений на основе экономико-математических моделей изделий, конструкций, архитектурно-планировочных вариантов и т. п.
Классификация по алгоритмам функционирования. Каждая система характеризуется алгоритмом функционирования — совокупностью предписаний, определяющих характер изменения управляемой величины в зависимости от воздействия. По алгоритмам функционирования системы делятся на стабилизирующие, программные, следящие и преобразующие системы.
Стабилизирующие системы обеспечивают поддержание с необходимой точностью (стабилизацию) одной или нескольких управляемых величин при произвольно меняющихся возмущающих воздействиях. Задающее воздействие системы - постоянная величина, т. е. u(t) = const.
Программные системы управляют изменением управляемой величины с необходимой точностью в соответствии с составленной программой, если она заранее известна в виде временной функции. Изменение управляемой величины по программе достигается добавлением к стабилизирующей системе программного устройства ПУ, изменяющего задающее воздействие u(t) во времени по определенному закону. Примерами программных систем являются системы управления химическими процессами, программного управления станками, системы программного управления выводом спутников Земли на расчетные орбиты.
Следящие системы осуществляют изменение управляемой величины не по заранее заданной программе, а произвольно. Например, антенна радиолокатора поворачивается, следуя за самолетом, траектория движения которого заранее неизвестна, т. е. «следит» за ним. Задающие воздействия и управляемые величины следящих систем могут иметь разнообразный характер по своей физической природе.
Преобразующие системы. Алгоритм системы - преобразование с необходимой точностью задающего воздействия (совокупности задающих воздействий) в управляемую величину (совокупность управляемых величин) в соответствии с некоторой функцией преобразования. Преобразующая система должна возможно более точно воспроизводить на своем выходе не само задающее воздействие (как следящая система), а некоторую величину, связанную с управляющим воздействием функций преобразования. К преобразующим системам относятся, например, интегрирующие, дифференцирующие, экстраполирующие и другие системы автоматического управления.
1.4. организационно-экономические системы управления [4]
Производственно-экономические и организационные системы являются сложными системами. Объекты и процессы в этих системах, как правило, не могут быть полно описаны математически. Функциональные зависимости содержат как непрерывные, так и булевы переменные для качественной оценки параметров или процессов по двухбалльной системе (ДА и НЕТ). При описании систем используются вероятностные функции, системы весов, экспертные оценки. Сложность математического описания производственно-экономических и организационных систем вытекает из того, что это человеко-машинные системы, функционирующие в условиях трудно предсказуемых ситуаций. Поведение систем обусловливается огромным количеством переменных разной физической природы, а соотношения между ними отличаются исключительным разнообразием. Изменение отдельной связи или параметров какого-либо элемента, входящего в систему, может приводить к изменению всех других связей и параметров или большинства из них.
Задача управления сложной системой сводится к тому, чтобы обеспечить такие функциональные преобразования параметров, которые были бы оптимальными по выбранным критериям эффективности достижения цели управления. Для упрощения математического описания сложных систем их разбивают на подсистемы по принципу иерархии.
Характерной особенностью проблемы управления сложными системами является необходимость системного подхода к управлению. Он заключается в том, что система должна рассматриваться как единое целое с позиций цели функционирования, общей для всех подсистем. Практически это приводит к тому, что недопустима (не имеет смысла) независимая оптимизация функционирования отдельных подсистем, образующих систему, с позиций частных целей этих подсистем. При известной структуре сложной системы цель ее функционирования описывается некоторой скалярной целевой функцией W, достигающей экстремального значения при оптимальном управлении.
Эффективность административно-хозяйственного управления в немалой степени определяется квалификацией и компетентностью "команды" высшего управляющего звена, что в первую очередь проявляется при создании организационных структур и механизмов управления, которые каждая "команда" предпочитает создавать "под себя". Этим определяется многообразие систем управления при практически полной непредсказуемости конечных результатов. Каждый человек в системе управления, а равно и каждое его решение по каждому конкретному вопросу – это либо дестабилизирующий, либо стабилизирующий фактор управления. Поэтому оценка управления обычно чисто субъективная и дается не системе управления, а ее руководителям: "хорошая команда" или "плохая команда".








