 2020-06-12
2020-06-12 309
309Виды организаций. Выделяют два вида организационных процессов – функционирование и развитие. Функционирование обеспечивает сохранение организации на основе обмена со средой ресурсами, энергией, информацией. Развитие предусматривает преобразование организации в соответствии с требованиями среды, переход к новому качественному состоянию.
Организация – это структурированная общность людей с общими целями и общим руководством. Это промышленные предприятия, организации сферы услуг, государственные и муниципальные структуры управления, общественные организации, и т.п. Организации делятся на первичные и вторичные.
Первичная организация обладает собственными целями, имеет абсолютный постоянный приоритет над участниками и наделяет их ресурсами. Примером является любое государственное учреждение (прокуратура, муниципалитет, и пр.).
Вторичная организация создается самими участниками и служит их целям. Среди вторичных организаций выделяют корпоративные и ассоциативные. Корпоративная имеет приоритет над участниками для решения текущих проблем (например, акционерное общество). В ассоциативной организации отношения являются партнерскими (клуб, коллектив ученых на семинаре, и т.п.).
Правовой статус. Деление организаций на официальные и неофициальные связано с их правовым положением. Официальную организацию можно рассматривать как совокупность должностей, связанных между собой производственными отношениями. Неофициальные организации образуют личности, а не должности. К таким организациям относятся, например, совокупность пользователей Интернета или организованная преступная группа.
Функциональная структура организаций основана на объединении видов деятельности по родственным группам (функциям) и обычно имеет следующие элементы:
А) Производственные подразделения – основные, вспомогательные, обслуживающие, экспериментальные.
Б) Управленческие подразделения – административные, информационные, сервисные, научно-исследовательские, совещательные (например, совет главных специалистов предприятия).
В) Социальные подразделения – столовая, клуб, база отдыха, поликлиника.
Подразделение – это официально созданная группа работников, выполняющая действия по достижении поставленной частной цели. Используют различные принципы выделения подразделений фирмы (предприятия):
- количественный (по необходимости для осуществления данной деятельности);
- временной (для выполнения работ за определенный период времени);
- технологический (по необходимости для обслуживания технологического процесса);
- профессиональный (одной профессии для выполнения данной работы).
Примерами подразделений являются бригады в артели грузчиков, вахты внутри экипажа судна, цеха промышленного предприятия, кафедры высшего учебного заведения.
Структура управления, основанная на выделении достаточно самостоятельных подразделений, называется дивизиональной (division – деление, разделение). Используются следующие принципы создания подразделений в рамках дивизиональной структуры:
А) рыночный (удовлетворение потребностей определенной группы клиентов);
Б) территориальный (удовлетворение потребностей на определенной территории);
В) товарный (удовлетворение потребностей клиентов в продукции и услугах);
Г) инновационный (освоение и производство новой продукции и услуг).
Типы связей между предприятиями, входящими в дивизиональную организационную структуру, могут быть различными. В акционерном холдинге, когда материнская фирма владеет контрольными пакетами акций остальных фирм, связи являются финансовыми. В акционерном обществе с дочерними компаниями к финансовым связям добавляются технологические, а непосредственно в акционерном обществе – еще и административные.
Адаптивные организационные структуры - это структуры, которые быстро приспосабливаются к требованиям внешней и внутренней среды. Среди них обычно выделяют проектные, матричные, программно-целевые, фрагментарные.
Проект – это группа видов деятельности, направленных на решение разовой задачи. Достоинства проектных структур - высокая целевая ориентация, специализация, концентрация ресурсов. Недостатки - связанность ресурсов до завершения работ, трудность нахождения применения высвобожденным ресурсам вследствие их уникальности.
Матричная структура – это совокупность временных рабочих групп в рамках организации или подразделения. Позволяет быстро маневрировать ресурсами, обеспечивает высокую целевую ориентацию работ. Недостатки - трудна в формировании и управлении.
Программно-целевая структура – совокупность подразделений, связанных с выполнением целевых комплексных программ. Если работа ведется только по одной программе, то программно-целевая структура – разновидность проектной. Если работа является дополнением к основной деятельности – то разновидность матричной структуры.
Фрагментарная организационная структура – совокупность автономных и полуавтономных подразделений (бригад, комиссий, творческих групп), работающих самостоятельно над несвязанными друг с другом проблемами инновационного характера. Пример – выполнение фундаментальных научно-исследовательских работ в рамках академического НИИ.
Функционирование управленческих структур. Управленческая структура – упорядоченная совокупность субъектов управления (подразделений, должностей) и связей между ними.
На управленческую структуру влияют различные факторы. Прежде всего - масштабы и структура организации. Большое значение имеют характер деятельности организации и территориальное размещение подразделений, особенности специализации производства, используемые технологии, затраты на управление, наличие людей, имеющих необходимую квалификацию.
Уровень руководства – это место в иерархической системе управления. На высшем уровне находятся руководители организации. К нижнему уровню относятся специалисты, руководящие исполнителями и имеющие непосредственных начальников (бригадиры, мастера).
Специалисты среднего уровня руководства подчиняются специалистам более высокого уровня управленческой иерархии и сами имеют в подчинении специалистов более низкого уровня. Начальник цеха с несколькими участками – руководитель среднего звена.
Норма управляемости – число работников, которыми может эффективно управлять руководитель. На высшем уровне руководства – это 3-5 человек. На среднем – 10-12 человек. На низшем – до 25-30 человек. Норма управляемости зависит от содержания работ, влияет на число нижестоящих подразделений и число дальнейших уровней управления.
Узкой специализации работ в организации соответствует, как правило, вертикальная многоуровневая организационная структура (руководитель организации – руководитель управления – руководитель отдела – исполнитель). Широкой специализации – горизонтальная (руководитель организации – специалисты и исполнители).
Управленческая ответственность - это необходимость давать отчет за решения и действия, а также за их последствия. Выделяют общую управленческую ответственность, которую несет руководитель за создание необходимых условий работы, и функциональную ответственность исполнителя за конкретный результат.
Работа выполняется нормально, если ответственность руководителя обеспечивается соответствующими полномочиями. Если полномочия превосходят ответственность, велика опасность административного произвола. Если полномочия меньше ответственности, управление, как правило, неэффективно. Количественными характеристиками управленческих полномочий являются объемы ресурсов, которыми он может распоряжаться без согласования с вышестоящей инстанцией, и число лиц, прямо или косвенно обязанных следовать принятым им решениям.
Масштабы полномочий, сосредоточенных у одного субъекта, зависят, прежде всего, от сложности, важности, разнообразия решаемых проблем, динамики бизнеса и размеров организации. Необходимо учитывать необходимость обеспечения единства действий, издержки, связанные с принятием решений, и надежность систем коммуникаций. Важны способности руководителей и исполнителей, морально-психологический климат в коллективе.
Централизация полномочий означает преимущественное сосредоточение полномочий на высших уровнях управления. При этом обеспечивается стратегическая направленность управления. Принятие решений концентрируется в руках тех, кто хорошо знает общую ситуацию. Однако есть и недостатки. Централизация полномочий требует больших затрат времени на передачу информации по иерархической лестнице, при этом информация может быть искажена. Решения принимают лица, плохо знающие конкретную ситуацию. Излишняя централизация сковывает процесс управления, делает его негибким.
Децентрализация управления – это преимущественное сосредоточение полномочий на нижних уровнях управления. Она обеспечивает гибкость и маневренность управления, снимает перегрузку центра второстепенными проблемами, сокращает информационные потоки, позволяет принимать решения лицам, хорошо знающим конкретную ситуацию. Но при этом придает решениям тактический (а не стратегический) характер, затрудняет координацию управленческой деятельности, может привести к игнорированию интересов организации в целом, к сепаратизму и разрушению организации.
Схемы управления. Функциональная схема управления основана на том, что руководитель руководит главными специалистами (по производству, финансам, маркетингу, персоналу), каждый из главных специалистов руководит каждым из руководителей подразделений, а те – своими исполнителями. Достоинством схемы является высокое качество решений. Недостатками является возможная нескоординированность решений главных специалистов, их борьба за приоритет, что приводит к высокой конфликтности. В итоге возможна общая неэффективность.
Линейно-штабная схема управления предусматривает свой штаб у каждого руководителя, который участвует в выработке решений. Руководители разного уровня общаются между собой, пользуясь информацией своих штабов. Достоинством является освобождение руководителей от анализа проблем и подготовки проектов решений. К недостаткам относится сохранение перегрузки руководителей текущими делами. Руководители высоких уровней управления оторваны от практики и не участвуют в реализации своих решений.
На практике используют два основных способа распределения полномочий: разделенные полномочия (руководитель передает полномочия подчиненному, оставляя за собой общий контроль), поглощенные полномочия (руководитель, передавая полномочия, одновременно полностью сохраняет их за собой).
Социометрические исследования. В любой фирме, на любом предприятии в дополнение к официальным организационным структурам создаются неформальные, основанные на отношениях между людьми, которые могут существенно влиять на результаты работы. Выявить их можно с помощью социометрии. Социометрическая техника применяется для диагностики межличностных и межгрупповых отношений. С помощью социометрии можно изучать типологию социального поведения людей в условиях групповой деятельности, судить о социально-психологической совместимости.
Вместе с официальной или формальной структурой общения в любой социальной группе всегда имеется психологическая структура неофициального или неформального порядка, формирующаяся как система межличностных отношений, симпатий и антипатий. Особенности такой структуры во многом зависят от ценностных ориентаций участников, их восприятия и понимания друг друга, взаимооценок и самооценок. Неформальная структура группы зависит от формальной структуры в той степени, в которой индивиды подчиняют свое поведение целям и задачам совместной деятельности.
Общая схема действий при социометрическом исследовании заключается в следующем. После постановки задач исследования и выбора объектов измерений формулируются основные гипотезы и положения, касающиеся возможных критериев опроса членов групп. Здесь не может быть полной анонимности, иначе социометрия окажется малоэффективной. Требования экспериментатора раскрыть свои симпатии нередко вызывает внутренние затруднения у опрашиваемых и проявляется у некоторых людей в нежелании участвовать в опросе. Поэтому для проведения исследования целесообразно привлекать постороннюю специализированную организацию
Литература
1. Мирошник И.В. Теория автоматического управления. Линейные системы: Учебное пособие для вузов. - СПб.: Питер, 2005. - 336 с.
2. Повзнер Л.Д. Теория систем управления: Учебное пособие для вузов. - М.: Изд. МГГУ, 2002. - 472 с.
4. Орлов А.И. Менеджмент: Учебник. – М.: "Изумруд", 2003. URL: http://www.aup.ru/books/m151/
5. Кориков А.М. Основы теории управления: Мультимедийный учебник. – Томск: ТУСУР. URL: http://www.tcde.ru/docs_pub/demo/otu/otu.exe
6. Новиков Д.А., Петраков С.Н. Курс теории активных систем. М.: СИНТЕГ, 1999. – 104 с. URL: http://www.aup.ru/books/m110/file_46.pdf
7 Туманов М.П. Теория автоматического управления: Лекции. URL: http://elib.ispu.ru/library/lessons/Tihonov_2/index.htm.
8. Туманов М.П. Теория управления. Теория линейных систем автоматического управления: Учебное пособие. – МГИЭМ. М., 2005, 82 с. URL: http://window.edu.ru/window_catalog/files/r24738/5.pdf.
11. Михайлов В.С. Теория управления. – К.: Выща школа, 1988.
12. Зайцев Г.Ф. Теория автоматического управления и регулирования. – К.: Выща школа, 1989.
14. Желтиков О.М. Основы теории управления. Конспект лекций. – Самара, СГТУ, 2008. – URL: http://www.jelomak.ru/pager.htm.
Тема 2. ОБЩИЕ ПРИНЦИПЫ УПРАВЛЕНИЯ
Смонтировали систему автоматического управления. Запустили на
оптимизацию. Ни продукции, ни отходов. Один дым.
Директор деревообделочного комбината.
Идеальной системой автоматического управления будем считать систему,
которая умеет смеяться над шутками своего программиста и сваливать свои ошибки на человеческий фактор.
Володя Бочаров. Уральский физик, ХХ в.
Содержание
Введение.
1. Фундаментальные принципы управления. Система управления. Принципы управления. Виды систем управления.
2. Статические характеристики систем управления. Виды статических характеристик. Статическое и астатическое регулирование. Статические регуляторы. Астатический регулятор.
3. Динамический режим работы. Переходные процессы в системе. Оценки переходных характеристик. Импульсная характеристика. Элементарные динамические звенья.
4. Уравнения состояния систем управления. Поведение системы. Линеаризация уравнения динамики. Передаточная функция. Элементарные динамические звенья.
5. Структурные схемы систем управления. Преобразования структурных схем. Последовательное соединение. Параллельное соединение. Замкнутое соединение с обратной связью.
6. Устойчивость и качество систем управления. Управляемость и наблюдаемость. Устойчивость систем. Точность работы систем. Качество работы систем.
Введение
Управление каким-либо объектом или процессом есть целенаправленное воздействие на него в целях установления требуемых состояний объекта, изменения его состояния в требуемом направлении или удержания в заданном постоянном состоянии. Управление должно обеспечивать целевое протекание технологических процессов преобразования энергии, вещества и информации, поддержание оптимальной работоспособности и безаварийности функционирования объекта путем сбора и обработки информации о состоянии объекта и внешней среды, выработки решений о воздействии на объект и их исполнении. В качестве объекта управления может служить самолет, станок, электродвигатель и т.п. Управление объектом с помощью технических средств без участия человека называется автоматическим управлением. Совокупность объекта управления и средств автоматического управления называется системой автоматического управления (САУ).
2.1. Фундаментальные принципы управления [7]
Система управления состоит из двух основных частей: объекта управления (ОУ) и устройства управления (УУ), которое называют также регулятором (Р). Регулятор на основании одного или нескольких задающих воздействий, определяющих закон (алгоритм) управления, вырабатывает управляющее воздействие U(t) на ОУ и поддерживает на заданном уровне или изменяет по определенному закону состояние Y(t), которое может отображаться на его выходе соответствующим сигналом y(t). Перед регулятором ставится задача обеспечения заданного качества работы системы во всех практически важных режимах, в том числе при воздействии на объект внешних возмущающих воздействий и дестабилизирующих факторов X(t). Регулятор создаётся разработчиком системы, исходя из знаний о свойствах объекта управления и требуемых задачах системы.
|
Рис.2.1.1. Система управления. |
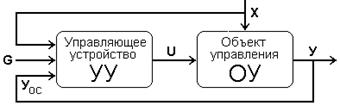
Внешние связи объекта управления показаны на рис. 2.1.1, где Х – канал воздействия среды на объект и управляющее устройство, Y – канал воздействия объекта на среду или информационный канал состояния объекта, U – канал воздействия управления на объект, G – задающее устройство (программатор) изменения управляющего воздействия.
Основной задачей управления является поддержание определенного закона изменения одной или нескольких физических величин процессов, протекающих в ОУ. Эти величины называются управляемыми (температура, давление, уровень жидкости, направление перемещения инструмента, и т.п.).
В составе объекта управления всегда содержится управляющий орган (УО) объекта, с помощью которого можно изменять параметры состояния ОУ (реостат, вентиль, заслонка и т.п.). Физическую величину U(t) на входе управляющего органа называют входной величиной ОУ или управляющим воздействием.
В состав ОУ обычно входит также чувствительный элемент (ЧЭ), который преобразует управляемую величину в пропорциональную ей величину, удобную для информации и использования в системе управления. Физическую величину y(t) на выходе ЧЭ называют выходной величиной ОУ. Как правило, это электрический сигнал (ток, напряжение) или механическое перемещение. В качестве ЧЭ могут использоваться термопары, тахометры, рычаги, датчики давления, положения и т.п.
Управляющее воздействие U(t) формируется устройством управления (УУ) и прикладывается к управляющему органу объекта с целью поддержания требуемых значений управляемой величины. Оно создается исполнительным элементом УУ, в качестве которого могут использоваться электрические или поршневые двигатели, мембраны, электромагниты и т.п.
В составе системы управления, как правило, имеется также задающее устройство (ЗУ). Оно задает программу изменения управляющего воздействия, то есть формирует задающий сигнал u(t). ЗУ может быть выполнено в виде отдельного устройства с формированием воздействия (сигнала) G(t) на вход УУ, может быть встроенным в УУ или вообще отсутствовать. В качестве ЗУ может выступать кулачковый механизм, магнитофонная лента, маятник в часах, и т.п.
Величина X(t), воздействующая на ОУ и (при необходимости) на УУ, называется возмущением. Она отражает влияние на выходную величину y(t) изменений окружающей среды, нагрузки и т.п.
В общем случае все связи в системе управления могут быть многоканальными (многомерными) любой физической природы (электрические, магнитные, механические, оптические и пр.).
Принципы управления. Различают три фундаментальных принципа управления состоянием ОУ: принцип разомкнутого управления, принцип компенсации, принцип обратной связи.
Принцип разомкнутого управления состоит в том, что программа управления жестко задана в ЗУ или внешним воздействием G(t), и управление не учитывает влияние возмущений на параметры процесса. Примеры систем - часы, магнитофон, и т.п.
Принцип компенсации применяется для нейтрализации известных возмущающих воздействий, если они могут искажать состояние объекта управления до недопустимых пределов. При априорно известной связи состояния объекта с возмущающим воздействием значение сигнала u(t) корректируются обратно пропорционально возмущающему воздействию x(t). Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п. Достоинство принципа компенсации - быстрота реакции на возмущения. Недостаток - невозможность учета подобным образом всех возможных возмущений.
Принцип обратной связи получил наибольшее распространение в технических системах управления, при этом управляющее воздействие корректируется в зависимости от выходной величины y(t). Если значение y(t) отклоняется от требуемого, то происходит корректировка сигнала u(t) с целью уменьшения данного отклонения. Связь выхода ОУ с входом управляющего устройства, выполняющего коррекцию сигнала u(t), называется главной обратной связью (ОС).
Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов - быстроту реакции на возмущение принципа компенсации и точность регулирования независимо от природы возмущений принципа обратной связи.
Виды систем управления. В зависимости от принципа и закона функционирования управляющего устройства различают основные виды систем: системы стабилизации, программные, следящие и самонастраивающиеся системы, среди которых можно выделить экстремальные, оптимальные и адаптивные системы.
Системы стабилизации обеспечивают неизменное значение управляемой величины при всех видах возмущений, т.е. y(t) = const. В устройстве управления формируется эталонный сигнал, с которым сравнивается выходная величина. УУ, как правило, допускает настройку эталонного сигнала, что позволяет менять по желанию значение выходной величины.
Программные системы обеспечивают изменение управляемой величины в соответствии с программой, задаваемой на входе УУ или формируемой ЗУ. К этому виду систем можно отнести магнитофоны, проигрыватели, станки с ЧПУ, и т.п. Различают системы с временной программой, обеспечивающие y = f(t), и системы с пространственной программой, в которых y = f(x), применяемые там, где на выходе систем важно получить требуемую траекторию в пространстве, например, в автомате сверления отверстий в печатных платах.
Следящие системы отличаются от программных лишь тем, что программа y = f(t) или y = f(x) заранее неизвестна. В качестве УУ выступает устройство, следящее за изменением какого-либо внешнего параметра. Эти изменения и будут определять изменения выходной величины y(t).
Все три рассмотренных вида систем могут быть построены по любому из трех принципов управления (разомкнутого управления, компенсации, обратной связи). Для них характерно требование совпадения выходной величины (состояния системы) с некоторым предписанным значением, которое в любой момент времени определено однозначно.
Самонастраивающиеся системы отличаются активным УУ, определяющим такое значение управляемой величины, которое в каком-то смысле является оптимальным.
Так, в экстремальных системах требуется, чтобы выходная величина всегда принимала экстремальное значение из всех возможных, которое заранее не определено и может изменяться. Для его поиска система выполняет небольшие пробные движения и анализирует реакцию выходной величины на эти пробы, после чего вырабатывается управляющее воздействие, приближающее выходную величину к экстремальному значению. Процесс идет непрерывно и выполняется только с использованием обратной связи.
Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило, сложная обработка информации о характере изменения выходных величин и возмущений, о характере влияния управляющих воздействий на выходные величины, может быть задействована теоретическая информация, информация эвристического характера и т.п. Поэтому основным отличием экстремальных систем является наличие ЭВМ. Эти системы могут работать в соответствии с любым из трех фундаментальных принципов управления.
В адаптивных системах предусмотрена возможность автоматической перенастройки параметров или изменения принципиальной схемы систем управления с целью приспособления к изменяющимся внешним условиям. В соответствии с этим различают самонастраивающиеся и самоорганизующиеся адаптивные системы.
2.2. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ [7].
Математические модели систем управления включают два вида описания состояния: статическое и динамическое.
Виды статических характеристик. Режим работы систем, в котором управляемая и все промежуточные величины не изменяются во времени, называется статическим (установившимся) и описывается уравнениями зависимости выходного состояния объекта управления от постоянных (независимых от времени) значений управляющих воздействий u и любых других дестабилизирующих факторов f. Уравнения этой зависимости вида y = F(u,f) называются уравнениями статики систем. Соответствующие им графики называются статическими характеристиками.
|
Рис. 2.2.1. Статическая характеристика САУ. |

Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u). Если звено имеет второй вход по возмущению f, то статическая характеристика задается семейством кривых y = F(u) при различных значениях f, или y = F(f) при различных u (рис. 2.2.1).
Примером функционального звена системы регулирования уровня воды в баке может быть обычный рычаг с поплавком. Уравнение статики для него имеет вид y = K u. Функцией звена является усиление (или ослабление) входного сигнала в K раз. Коэффициент K = y/u, равный отношению выходной величины к входной, называется коэффициентом усиления звена. Если входная и выходная величины имеют разную природу, его называют коэффициентом передачи. Звенья с линейными статическими характеристиками называются линейными. Статические характеристики реальных звеньев систем, как правило, нелинейные. Для них характерна зависимость коэффициента передачи от величины входного сигнала: K=Dy/Du ≠ const, которая может быть выражена какой-либо математической зависимостью, задаваться таблично или графически. Если все звенья системы линейные, то система имеет линейную статическую характеристику. Если хотя бы одно звено нелинейное, то система нелинейная.
|
Рис. 2.2.2. |
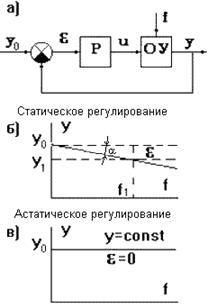
Статическое и астатическое регулирование. Если на управляемый процесс действует возмущение (дестабилизирующий фактор) f, то значение имеет статическая характеристика системы в форме y = F(f) при y0 = const. Возможны два характерных вида этих характеристик (рис. 2.2.2). В соответствии с тем, какая из двух характеристик свойственна данной системе, различают статическое и астатическое регулирование.
Рассмотрим систему регулирования уровня воды в баке. Возмущающим фактором системы является поток Q воды из бака. Пусть при Q = 0 имеем y = y0, сигнал рассогласования по заданному уровню воды e = 0. Звено управления Р системы (регулятор) настраивается так, чтобы вода при этом в бак не поступала. При Q ≠ 0, уровень воды понижается (e ≠ 0), поплавок опускается и открывает заслонку, в бак начинает поступать вода. Новое состояние равновесия достигается при равенстве входящего и выходящего потоков воды. Следовательно, при Q ≠ 0 заслонка должна быть обязательно открыта, что возможно только при каком-то новом уровне воды y1, при котором e = К (y0-y1) ≠ 0. Причем, чем больше Q, тем при больших значениях e устанавливается новое равновесное состояние. Статическая характеристика системы имеет характерный наклон (рис. 2.2.2б).
Статические регуляторы работают при обязательном отклонении e регулируемой величины y от требуемого значения у0. Это отклонение тем больше, чем больше возмущение f, и называется статической ошибкой регулятора. Чем больше коэффициент передачи К регулятора, тем на большую величину будет открываться заслонка при одних и тех же значениях e, обеспечивая большую величину потока Q, при этом статическая характеристика системы пойдет более полого. Поэтому для уменьшения статической ошибки надо увеличивать коэффициент передачи регулятора. Этот параметр регулирования получил название статизма d и равен тангенсу угла a наклона статической характеристики, построенной в относительных единицах:








