 2020-06-12
2020-06-12 207
207Весовая функция находится дифференцированием переходной характеристики:
h(t) = (k/T) exp(-t/T) 1(t).
Множитель 1(t) определяет существование функции при t≥0 и обычно опускается (подразумевается по умолчанию).
По переходной характеристике можно определить передаточный коэффициент k, равный установившемуся значению H(t), и постоянную времени Т по точке пересечения касательной к кривой в начале координат с ее асимптотой. Касательная при t=0 равна k/T, а при t=T значение H(t) = 0.63k. Чем больше Т, тем больше длительность переходного процесса. Практически обычно принимают, что переходной процесс заканчивается при t порядка 3T, что соответствует 95% установившегося значения. Импульсная функция h(t) также имеет касательную k/T при t=0, которая пересекает линию установившегося значения 0 в точке t=Т. Характерен скачок функции в начальный момент времени, возникающий из-за наличия на входе d-функции. Так как идеального скачка быть не может, то будет наблюдаться процесс, обозначенный на рис. 3.5.2 пунктиром.
|
Рис. 3.5.4. |

АФЧХ инерционного звена (рис. 3.5.4):
W(jw) = k/(Tjw +1) = k(Tjw-1) /[(Tjw+1)(Tjw-1)] =
= k [1/(T2w2 +1) - jTw/(T2w2 +1)] =
= k exp(-j arctg Tw) /  .
.
Годограф описывает полуокружность с наинизшей точкой на частоте w=1/Т, при этом фазовый сдвиг равен -p/4, a коэффициент усиления АЧХ равен 0.707k. При изменении частоты от 0 до ∞ радиус-вектор АЧХ монотонно убывает от значения k до 0. Полная АФЧХ для положительных и отрицательных частот представляет собой окружность.
|
Рис. 3.5.5а. |

Пример реализации звена RC-цепочкой приведен на рис. 3.5.5а. Комплексное уравнение выходного напряжения звена в радиотехнике, определяемое законом Ома, записывается в форме:
Uвых(w) = [Uвх(jw)/(R+1/jwC)](1/jwC) = Uвх(jw)/(jwRC+1).
W(w) = Uвых(jw)/Uвх(jw) = 1/(jwRC+1).
W(w) = k/(Tp+1), где p=jw, T=RC, k=1.
|
Рис. 3.5.6а |
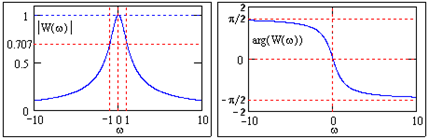
На рис. 3.5.6а приведены комплексные АЧХ и ФЧХ приведенного RC-звена при Т=RC=1 и k=1 на частоте (в радианах) от -10 до 10. Как следует из этого рисунка, звено передает на выход, в основном, только низкие частоты входного сигнала (от -1/RC до 1/RC по уровню 0.707) с нарастающим подавлением высоких частот и увеличением их сдвига по фазе по мере роста частоты. Чем меньше инерционность звена (меньше Т=RC), тем больше амплитудная характеристика по своим значимым значениям вытянута по оси частот (шире полоса пропускания).
ЛАЧХ инерционного звена:
L(w) = 20 lg |W(jw)| = 20 lg k – 10 lg(T2w2+1).
Чтобы упростить использование ЛАЧХ, вводят понятие асимптотических ЛАЧХ, то есть кусочно - постоянных функций, не сильно отличающихся от истинных. Они применяются не только для инерционного звена, но и для любых более сложных передаточных функций. Переход к асимптотической ЛАЧХ выполняется в следующем порядке (рис. 3.5.5):
Выделим области низких и высоких частот, по отдельности рассмотрим поведение ЛАЧХ в этих областях и оценим максимальную ошибку, возникающую на границе областей.
В области низких частот T2ω2 << 1, и можно пренебречь выражением T2ω2. Получаем горизонтальную прямую: L(ω)=20lgk.
В области высоких частот T2ω2 >> 1 и значением 1 можно пренебречь. Получаем уравнение прямой с наклоном 10дб./декаду в логарифмических координатах: L(ω)=20lgk - 20lgTω.
Излом асимптотической LАЧХ имеется на ω=1/T (сопрягающая частота), где ошибка максимальна, не зависит от k и T, и равна примерно -3дб.:
ΔL=20lgk-20lgk+10lg(T2ω2+1)= 10lg2 ≈ - 3.03 дб.
Уровень -3 дб. принято считать границей полосы пропускания.
|
Рис. 3.5.5. |

ЛФЧХ асимптотически стремится к нулю при уменьшении w до нуля (чем меньше частота, тем меньше искажения сигнала по фазе) и к значению -p/2 при возрастании w до бесконечности. Перегиб кривой на сопрягающей частоте при j(w) = -p/4. ЛФЧХ всех апериодических звеньев имеют одинаковую форму и могут быть построены по типовой кривой с параллельным сдвигом вдоль оси частот.
Для всех звеньев первого порядка характерен наклон ЛАЧХ 20 дБ/дек и максимальный поворот фазы p/2.
При достаточно больших значениях Т звено на начальном участке может рассматриваться как интегрирующее, при малых Т - как безынерционное. Примеры апериодического звена: термопара, электродвигатель, четырехполюсник из сопротивления и емкости или сопротивления и индуктивности.
Интегрирующее (астатическое) звено. Идеальное интегрирующее звено описывается дифференциальным уравнением первого порядка:
dy/dt = k u(t),
|
Рис. 3.5.7а. |

т.е. скорость изменения выходной величины пропорциональна значению входного сигнала.
Общее решение: y(t) = y(0) +  k u(t) dt.
k u(t) dt.
Пример реализации звена – интегрирующая емкость (рис. 3.5.7а).
|
Рис. 3.5.6. |

Передаточная функция звена: W(p) = k/p.
Переходная характеристика при u(t) = 1(t) и нулевых начальных условиях (рис. 3.5.6):
H(t) = k  1(t) dt = kt. H(p) = k/p2.
1(t) dt = kt. H(p) = k/p2.
Весовая функция при u(t) = d(t) и нулевых начальных условиях (рис. 3.5.6):
h(t) = k 1(t). h(p) = k/p.
АФЧХ интегратора: W(jw) = k/jw = -jk/w = k exp(-jp/2)/w.
|
Рис. 3.5.7. |

Интегратор ослабляет высокие частоты пропорционально частоте и неограниченно усиливает («накапливает») низкие частоты. Годограф АФЧХ (рис. 3.5.7) расположен вдоль отрицательной мнимой оси. Фазово-частотная характеристика для положительных частот имеет постоянное значение -π/2, т.е. все частоты звено пропускает с запаздыванием по фазе на 90о. Радиус - вектор АЧХ при изменении частоты от 0 до ∞ монотонно убывает от значения ∞, стремясь к 0. Коэффициент усиления бесконечно малых частот теоретически неограничен.
ЛАЧХ интегратора:
L(w) = 20 lg |W(jw| = 20 lg k – 20 lg w.
Логарифмическая характеристика представляет собой прямую с отрицательным наклоном 20 дБ/дек, которая проходит через точку 0 дБ на частоте w = k.
При k = 1 звено представляет собой “чистый” интегратор W(p) = 1/p. Интегрирующее звено неограниченно "накапливает" входное воздействие. Примеры интегрирующих звеньев: поршневой гидравлический демпфер, электрическая емкость и т.п.
Интегрирующее звено с замедлением (рис. 3.5.8) описывается дифференциальным уравнением: T d2y(t)/dt2 + dy(t)/dt = k u(t).
Передаточная функция звена: W(p) = k/[p(Tp+1)].
|
Рис. 3.5.8. |

Для нахождения временных характеристик звена удобно представить передаточную функцию в виде суммы:
W(p) = k/p – kT/(1+Tp).
Соответственно, решение уравнения будет складываться в виде суммы решений для идеального интегрирующего звена и апериодического звена первого порядка. Переходная характеристика:
H(t) = k[t-T(1-exp(-t/T))] 1(t).
Весовая функция:
h(t) = k[1-exp(-t/T)] 1(t).
Частотные характеристики звена:
L(w) = 20 lg [k/(w  )].
)].
График асимптотической ЛАЧХ представляет собой две прямые
L1(w) = 20 lg(k) – 20 lg(w), w < 1/T,
L2(w) = 20 lg(k/T) – 40 lg(w), w > 1/T,
с отрицательными наклонами соответственно 20 и 40 дБ/дек.
Идеальное дифференцирующее звено. Выходная величина звена пропорциональна скорости изменения входной величины (производной от входной величины), а уравнение динамики имеет вид: y(t) = k du(t)/dt. Передаточная функция: W(p) = kp. При k = 1 звено осуществляет чистое дифференцирование W(p) = p.
|
Рис. 3.5.9. |

Идеальное дифференцирующее звено реализовать невозможно, так как величина всплеска выходной величины при подаче на вход единичного ступенчатого воздействия всегда ограничена, а должна быть бесконечно большой.
Близок к идеальному звену операционный усилитель в режиме дифференцирования (рис. 3.5.9).
Переходная характеристика:
H(t) = k d1(t)/dt = k d(t),
где функция d(t) может имитироваться достаточно коротким (<<RC) импульсом с площадью, равной 1.
Импульсная характеристика:
h(t) = k dd(t)/dt.
Частотная передаточная функция:
W(jw) = kjw.
Дифференцирующее звено с замедлением. На практике используют реальные дифференцирующие звенья, осуществляющие приближенное дифференцирование входного сигнала. Реальное дифференцирующее звено является последовательным соединением двух типовых звеньев - идеального дифференцирующего kp и инерционного 1/(Tp+1). В конечном диапазоне рабочих частот характеристики такого звена могут быть сколь угодно близки к идеальным.
Звено описывается уравнением: T dy(t)/dt + y(t) = k du(t)/dt.
Передаточная функция: W(p) = kp /(Tp+1).
|
Рис. 3.5.10. |

При малых значениях Т звено можно рассматривать как идеальное дифференцирующее.
Переходная характеристика:
H(t) = (k/T) exp(-t/T) 1(t).
Импульсная характеристика:
h(t) = [kd(t)/T – (k/T2) exp(-t/T)] 1(t).
|
Рис. 3.5.11. |

По переходной характеристике, имеющей вид экспоненты (рис. 3.5.10), можно определить передаточный коэффициент k и постоянную времени Т. Примерами звеньев являются четырехполюсники из сопротивления и емкости или сопротивления и индуктивности. Дифференцирующие звенья применяются для улучшения динамических свойств САУ.
Частотная передаточная функция:
W(jw) = kjw/(jwT+1).
Годограф звена (рис. 3.5.11) описывает полуокружность с радиусом, стремящимся к бесконечности, при Т®0. При этом годограф прижимается к положительной мнимой полуоси и стремится к годографу идеального дифференцирующего звена. Частота w=1/T считается максимальной, до которой реальное звено может приниматься за близкое к идеальному.
|
Рис. 3.5.12. |

Частотные характеристики звена приведены на рис. 3.5.12. В области высоких частот реальное звено пропускает сигнал хуже, чем идеальное. При w ® ∞ коэффициент передачи звена стремится к k/T. Фазовые сдвиги, вносимые звеном, являются наибольшими при низких частотах. На высоких частотах фазовый сдвиг стремится к нулю при w ® ∞.
Апериодическое звено второго порядка. Дифференциальное уравнение звена:
T2 d2y(t)/dt2 + 2rT dy(t)/dt + y(t) = k u(t),
где r - коэффициент (декремент) затухания (демпфирования). Передаточная функция:
W(p) = k/(T2p2 + 2r Tp + 1).
Корни характеристического уравнения:
p1,2 = (-r ±  )/T.
)/T.
Звено будет апериодическим второго порядка, если корни вещественные, или колебательным, если корни комплексные.
Если r ≥ 1, то знаменатель W(p) имеет два вещественных корня и может быть разложен на два сомножителя:
T2p2+2rTp+1 = (T1p+1)(T2p+1), T1,2 = T(r ±  ).
).
|
Рис. 3.5.13. |

Переходная характеристика и весовая функция:
H(t) = k(1-(T1/(T1-T2)) exp(-t/T1) + (T2/(T1-T2)) exp(-t/T2)) 1(t).
h(t) = (k/(T1-T2)) (exp(-t/T1) – exp(-t/T2)) 1(t).
Такое звено эквивалентно двум последовательно включенным апериодическим звеньям первого порядка с общим коэффициентом передачи k и постоянными времени Т1 и Т2. Амплитудная частотная характеристика:
A(w) = k/[ 
 ].
].
Фазовая характеристика: j(w) = - argtg wT1 – argtg wT2.
|
Рис. 3.5.14. |

Колебательное звено. При r<1 корни полинома знаменателя W(p) апериодического звена второго порядка комплексно сопряженные. Переходная характеристика представляет собой выражение, характеризующее затухающий колебательный процесс с затуханием r (возможные значения от 0 до 1) и частотой w0 = 1/T, т.е. переходный процесс представляет собой затухающие колебания относительно установившегося значения (рис. 3.5.14). Примерами колебательного звена могут служить пружина с успокоительным устройством, электрический колебательный контур с активным сопротивлением и т.п.
При r = 0 колебания носят незатухающий характер.
Аналитическая формула переходной характеристики звена:
H(t) = k[1-exp(-gt) (cos lt+(g/l) sin lt)] 1(t), g= (l/p) ln (A1/A2), l= w0  .
.
Импульсная функция:
h(t) = (kw02/l) exp(-gt) sin(lt) 1(t).
Зная характеристики реального устройства можно оценить его параметры как колебательного звена. Постоянная времени Т и коэффициент затухания:
T = Tk/  , r = ln(A1/A3) /
, r = ln(A1/A3) /  ,
,
где Tk – период колебаний, А1 и А3 – амплитуды двух соседних полуколебаний одного знака относительно установившегося значения (см. рис. 3.5.14).
|
Рис. 3.5.15. |

АФЧХ колебательного звена:
W(jw) = k/[-T2w2 + 2r Tjw +1].
Годограф (рис. 3.5.15) описывает кривую, заходящую в третий квадрант. Фазовый сдвиг на частоте ω0 равен -π/2, и стремится к -p при дальнейшем увеличении частоты.
ЛАЧХ колебательного звена (рис. 3.5.16):
L(w) = 20 lg k – 10 lg((1-T2 w2)2 + 4r2T2w2).
При r<0.707 амплитудная частотная характеристика звена имеет резонансный пик на частоте
wm = w0  .
.
Высота пика тем больше, чем меньше параметр затухания, и определяется выражением:
A(wm) = k/[2r  ].
].
Асимптотическая ЛАЧХ колебательного звена на низких частотах до сопрягающей частоты w0 = 1/T параллельна оси абсцисс (T2w2<<1, L(w) @ 20 lg k), при дальнейшем увеличении частоты идет с наклоном - 40 дБ/дек, т.е. высокие частоты колебательное звено "заваливает" сильнее, чем апериодическое звено.
|
Рис. 3.5.16. |

Реальная ЛАЧХ при w» w0 значительно отличается от асимптотической. Это отличие тем существенней, чем меньше коэффициент демпфирования r. В предельном случае r = 0 получаем звено, у которого при w» w0 амплитуда выходных колебаний стремится к бесконечности.
ЛФЧХ при малых частотах асимтотически стремится к нулю. При увеличении частоты до бесконечности выходной сигнал поворачивается по фазе относительно входного на угол, стремящийся в пределе к -p.
Наклон ЛАЧХ 40 дБ/дек и максимальный поворот фазы до -p характерны для всех звеньев второго порядка.
3.6. ПОСТРОЕНИЕ МОДЕЛЕЙ ВХОД-ВЫХОД [1].
Модель вход-выход строится по известным уравнениям отдельных компонентов (блоков, звеньев). Процедура сводится к преобразованию системы дифференциальных уравнений, описывающих поведение отдельных блоков, к единому уравнению системы управления.
Простейшие соединения блоков. Возможны три способа соединения звеньев: последовательное, параллельное и встречно-параллельное или соединение с обратной связью (ОС).
|
Рис. 3.6.1. |

Последовательное соединение блоков. Последовательным называют такое соединение звеньев, при котором выходная величина предыдущего звена является входной для последующего (рис. 3.6.1). При известных передаточных функциях звеньев, можно записать:
X2(p) = W2(p) X3(p), X1(p) = W1(p) X2(p) = W1(p)W2(p)X3(p).
W(p) = W1(p) W2(p).
Таким образом, систему из неограниченного количества звеньев, включенных последовательно, можно заменить одним эквивалентным звеном с передаточной функцией W(p) равной произведению передаточных функций звеньев.
Рассмотрим последовательное соединение апериодического звена (с единичным коэффициентом передачи W1(p) = 1/(Tp+1)) и идеального дифференцирующего звена (W2(p) = kp). Передаточная функция
W(p) = kp/(Tp+1),
что полностью совпадает с передаточной функцией реального дифференцирующего звена.
|
Рис. 3.6.2. |

Параллельное соединение блоков. При параллельном соединении звеньев на все входы подается одна и та же величина, а выходная величина равна сумме выходных величин отдельных звеньев (рис. 3.6.2).
X2(p) = W1(p) X4(p), X3(p) = W2(p) X4(p).
X1(p) = X2(p)+X3(p) = (W1(p)+W2(p)) X4 (p).
W(p) = W1(p)+W2(p).
Из последнего выражения следует, что параллельное соединение звеньев эквивалентно одному звену с передаточной функцией, равной сумме передаточных функций, входящих в соединение звеньев. Переходная характеристика:
H(t) =  Hi(t).
Hi(t).
Построение переходной характеристики параллельного соединения заключается в построении переходных характеристик отдельных звеньев на одном графике и суммировании их ординат для одних и тех же значений времени.
Пример: ПИ-регулятор - параллельное соединение пропорционального (W1(p)=kп) и интегрирующего звеньев (kи/p). Передаточная функция
W(p) = (kпp + kи)/p.
|
Рис. 3.6.3. |

Система с отрицательной обратной связью. При встречно-параллельном соединении звеньев на вход звена кроме входной подается еще и выходная величина через специальное звено обратной связи. На рис. 3.6.3 звено W1(p) составляет прямую цепь, которая охвачена ОС, звеном W2(p). При этом если сигнал x3 вычитается из входного сигнала x4, то ОС называется отрицательной, а если суммируется, то ОС – положительная. Для отрицательной обратной связи можно записать:
X1(p) = W1(p) X2(p), X3(p) = W2(p) X1(p), X2(p) = X4(p) – X3(p).
Решая эти три уравнения относительно X1(p), находим:
X1(p) = X4(p) W1(p) /(1+ W1(p)W2(p)).
Передаточная функция
W(p) = W1(p) /(1+ W1(p)W2(p)). (3.6.1)
Полученная передаточная функция может интерпретироваться как передаточная функция последовательно соединенных звеньев с передаточной функцией W1(p) и системы с передаточной функцией:
Ф(p) = 1/(1+Wрс),
где Wрс = W1(p)W2(p) - передаточная функция разомкнутой системы, например, в точке “а”.
При охвате любого звена единичной ОС (т.е. при W2 (p) = 1) разомкнутая система преобразуется в замкнутую с передаточной функцией (из выражения (3.6.1)):
W(p) = W1(p) /(1+ W1(p)).
С другой стороны, если в выражении (3.6.1) обеспечить высокий коэффициент усиления в цепи прямой связи (W1(p) → ∞), то 1 в знаменателе можно пренебречь и свойства звена определяются только свойствами цепи ОС:
W(p) = 1/W2(p).
|
Рис. 3.6.4. |

Консервативное звено - двойной интегратор, имеющий передаточную функцию W1(p) = 1/p2, с отрицательной обратной связью, образованной пропорциональным звеном с W2(p) = 1/w2. Используя формулу (3.6.1), находим:
W(p) = 1/(p2+w2) = k/(T2p2 +1),
где k = 1/w2, T = 1/w.
Передаточные функции систем управления.
Система управления без обратной связи (разомкнутая система), состоящая из последовательно соединенных регулятора и объекта управления (рис. 3.6.5).
|
Рис. 3.6.5. |

Пусть объект управления описывается операторным уравнением
Y(p) = Wo(p) U(p),
а регулятор представлен выражением
U(p) = K(p) y*(p),
где y(t) ↔ Y(p) - выходная переменная, u(t) ↔ U(p) - управляющее воздействие, y*(t) ↔ y*(p) - задающее воздействие (вход системы), Wo(p) и К(р) - передаточные функции (произвольные интегро-дифференциальные операторы).
Используя правило построения модели последовательно соединенных блоков, находим уравнение
y(t) ↔ Y(p) = W(p) y*(p),
связывающее выходную переменную y(t) и входную переменную через передаточную функцию разомкнутой системы W(p) = Wo(p)K(p).
Замкнутая система управления, т. е. система, представленная объектом управления и регулятором отклонения (рис. 3.6.6):
|
Рис. 3.6.6. |

U(p) = K(p)e(p),
e(p) ↔ e(t) = y*(t)-y(t),
где e(t) - рассогласование (отклонение). Используя правило (3.6.1), находим модель замкнутой системы в виде
Y(p) = W(p) y*(p),
W(p) = K(p)Wo(p) /(1+K(p)Wo(p)).
Замыкание системы приводит к изменению знаменателя ее передаточной функции - характеристического полинома системы, а, следовательно, и корней полинома (полюсов системы).
Литература
1. Мирошник И.В. Теория автоматического управления. Линейные системы: Учебное пособие для вузов. - СПб.: Питер, 2005. - 336 с.
7. Туманов М.П. Теория автоматического управления: Лекции. URL: http://elib.ispu.ru/library/lessons/Tihonov_2/index.htm.
8. Туманов М.П. Теория управления. Теория линейных систем автоматического управления: Учебное пособие. – МГИЭМ. М., 2005, 82 с. URL: http://window.edu.ru/window_catalog/files/r24738/5.pdf.
9. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1975.
14. Желтиков О.М. Основы теории управления. Конспект лекций. – Самара, СГТУ, 2008. – URL: http://www.jelomak.ru/pager.htm.








