 2020-06-12
2020-06-12 310
310Диаграммы Солодовникова устанавливают связь между σ%, tпп, Рмах и ωс - частотой среза системы, то есть той частотой, где усиление системы равно 1 или L(ωс) = 0.
|
Рис. 4.5.5. |
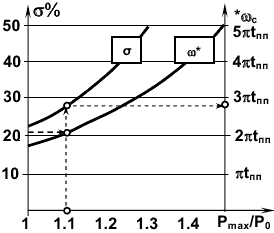
Область существенных частот (ωн, ωв) - это та часть частотной характеристики, которая в основном определяет качество системы. Диапазон ЛАЧХ для области существенных частот от +26дб. до -16дб. Уровень +26дб. соответствует усилению K=20 и соответствующей установившейся ошибке eуст=1/(1+К) ≈ 0.05, т.е. нижняя частота области существенных частот определяется статической точностью eуст ≈ 0.05 при ступенчатом входном воздействии. Левее частоты ωн ЛАЧХ не ниже +26дб, если не требуется астатизма, либо имеет наклон в зависимости от порядка астатизма. Уровень -16дб. соответствует малости влияния высокочастотных составляющих переходного процесса на уровне ≈ 10%. Наклон ЛАЧХ в области существенных частот должен быть -20дб./дек. На диаграмме Солодовникова по горизонтали отложена второстепенная величина Рмах/Р0, которая в настоящее время используется редко, а по вертикальным осям отложены σ%, tпп и ωс.
Использовать диаграммы Солодовникова (рис. 4.5.5) можно по-разному. Обычно применяется такая методика. Уточняют, какие показатели качества могут быть сформулированы заказчиком, и остальные параметры, необходимые для построения корректирующего устройства, определяют по диаграммам Солодовникова. По графикам можно, например, определить при заданном перерегулировании и времени переходного процесса частоту среза системы: (σ%, tпп) → ωс, n, ∆A, ∆φ. Причём последние три параметра обеспечиваются автоматически. Тогда алгоритм синтеза САУ при исходно заданных σ%, tпп может быть, например, таким:
· По диаграммам определяем ωс (выражение ωс через tпп).
· Строим область существенных частот, что даёт нам основную часть желаемой ЛАЧХ. Достраиваем высокочастотную часть произвольно и низкочастотную часть, исходя из требуемого порядка астатизма.
· Синтезируем последовательное корректирующее звено, обеспечивающее такую ЛАЧХ. Использование методики Солодовникова гарантирует показатели качества замкнутой системы и запасы устойчивости по амплитуде на уровне ∆A%=200 (коэффициент усиления может быть увеличен в два раза), и по фазе на уровне ∆φ =35˚.
Программы анализа качества процессов управления. Современные инструментальные средства анализа и синтеза систем управления представлены множеством различных специализированных программных пакетов и комплексов, которые позволяют в диалоговом режиме выполнять операции над матрицами и полиномами, вычислять временные и частотные характеристики, строить корневые годографы, анализировать чувствительность и устойчивость, проверять управляемость и наблюдаемость системы, находить ее полюса и нули, сравнивать переходные процессы в системе по интегральным критериям и находить лучший, определять параметры и характеристики стохастических сигналов на входе и на выходе системы, составлять и преобразовывать математические модели исследуемой системы.
Эти программные средства обладают развитым сервисом, что позволяет строить и сравнивать графики нескольких процессов, изображать взаимные зависимости, фазовые кривые и портреты, строить характеристики и диаграммы, изображать и преобразовывать структурные модели системы, при этом графические построения могут быть выполнены в двух- и трехмерном представлении.
Известны фирменные и университетские программные пакеты анализа и синтеза систем управления: LSАР – США (Ливерморская национальная лаборатория) ТUТSIМ – США (Станфордский университет); СLADP – Великобритания (Кембридж); КЕDDС – Германия (Рурский университет); МАТRIХ - фирмы Integrated Systems Inc.; SIMULINK в среде МАТLАВ известной фирмы Маth Works Inc.; МАRS – Украина (Институт кибернетики). Среди отечественных инструментальных программных средств известны разработки Академии авиационного и космического приборостроения, Санкт-Петербург; Московского инженерно-физического института; Московского государственного технического университета; Института проблем управления РАН, Москва.
Программные комплексы ТUТSIМ, МАТRIХ, SIMULINK позволяют исследовать модели любых динамических систем, которые испытывают любые внешние воздействия. Комплексы обеспечивают команды изменения структуры модели, ее параметров, выходных блоков и диапазонов рассчитываемых данных; команды одиночного и многократного запуска, останова и продолжения процесса моделирования с выводом графиков и числовых данных на экран, принтер или в файл; команды графического сервиса, позволяющие изображать оси, сетку, маркировку, комментарии к графикам, строить фазовые кривые или взаимозависимости и прочее. Комплексы располагают различными функциональными блоками для моделирования любых непрерывных и дискретных, линейных и нелинейных динамических систем, испытывающих детерминированные и стохастические воздействия.
4.6. СЛУЧАЙНЫЕ ПРОЦЕССЫ В СИСТЕМАХ [8].
В реальных системах имеются помехи (возмущения), действующие в каналах передачи информации. Часто не имеется никакой, кроме статистической, информации об этих факторах, что заставляет считать эти параметры случайными величинами с заранее неизвестными законами распределения. Так возникает задача управления в условиях неопределенности. Здесь имеются два аспекта: управление в условиях неопределенности и задача борьбы с помехами.
Модели случайных сигналов. Случайные процессы и отображающие их сигналы будем считать функциями времени, принимающими случайные значения. В каждый момент времени, значение случайного процесса есть случайная величина x(t). Основной характеристикой случайной величины в момент времени t является функция p(x,t) - плотность вероятности в момент t. Плотность вероятности определяет функции математического ожидания и дисперсии случайных величин:
Mx(t) =  x(t) p(x,t) dx, Dx(t) = (x(t)-Mx(t))2 p(x,t) dx.
x(t) p(x,t) dx, Dx(t) = (x(t)-Mx(t))2 p(x,t) dx.
Для описания статистической взаимосвязи значений x(t) в разные моменты времени вводятся корреляционная функция сигнала x(t):
Kx(t1,t2) = M[(x(t1)-Mx(t1)) (x(t2)-Mx(t2))],
и взаимная корреляционная функция сигналов x(t) и y(t):
Kxу(t1,t2) = M[(x(t1)-Mx(t1)) (y(t2)-My(t2))].
Отметим, что Kx(t,t) = Dx(t), т.е. при t1 = t2 = t это есть дисперсия в момент времени t.
Стационарным случайным процессом называется такой случайный процесс, для которого корреляционная функция зависит не от абсолютных значений t1 и t2, а только от их разности K(t1,t2) = K(t1-t2) = K(t). Дисперсия и математическое ожидание для стационарного случайного процесса являются константами. Стационарный случайный процесс для САУ не меняет своих статистических характеристик за время жизни системы.
Спектральная плотность S(ω) стационарного случайного процесса, есть преобразование Фурье от корреляционной функции K(τ). Соответственно, корреляционная функция K(τ) есть обратное преобразование Фурье спектральной плотности S(ω):
S(w) = K(t) exp(-jwt) dt, K(t) = (1/2p) S(w) exp(jwt) dw.
Спектральная плотность случайного процесса описывает разложение мощности процесса по гармоническим составляющим. Можно выразить дисперсию через интеграл от спектральной плотности. Это означает, что дисперсия есть суммарная мощность случайного процесса, распределённая по частоте:
D = K(0) = (1/2p) S(w) dw.
Фильтрация помех. Будем считать, что в САУ помехи могут быть в двух основных местах: помеха в канале управления (к управлению добавляется помеха W) и помеха в канале измерения (выходной сигнал измеряется с помехой V). Наиболее общая задача фильтрации шума - максимально возможное подавление обеих помех.
Если рассмотреть шумовой сигнал с бесконечным равномерным спектром, то ему будет соответствовать корреляционная функция в виде d-функции:
S(ω) = s2 = const; K(τ) = (s2/2π) δ(τ); D = K(0) =∞.
Эти три уравнения описывают “белый шум” с интенсивностью s2. Ясно, что такой сигнал не может быть физически реализован в силу бесконечной мощности. Можно, однако, реализовать сколь угодно близкий к этому случайный процесс, называемый "розовым шумом". Формально розовый шум получается при пропускании белого шума через любое реальное звено. При этом ограничивается спектр сигнала, так как никакое реальное звено не может пропускать бесконечную полосу частот. В результате, у реального розового шума может быть сколь угодно широкий, но убывающий спектр, а его корреляционная функция может очень быстро убывать, что означает малую связь значений процесса в разные моменты времени.
Задачу фильтрации помех будем решать как оптимальную, то есть искать условия наибольшего подавления помех. Помехи будем считать случайными процессами с известными корреляционными функциями (спектральными характеристиками). Алгоритмы управления и фильтрации могут быть реализованы по отдельности, и их одновременное функционирование в замкнутой системе не мешает друг другу. Другими словами, оптимальный фильтр можно рассчитывать отдельно от регулятора в том смысле, что характеристическое уравнение замкнутой системы оказывается равным произведению уравнений подсистемы регулирования и подсистемы фильтрации.
При анализе и синтезе фильтров используется аддитивная модель входного сигнала: u(t) = s(t)+q(t), где s(t) - полезная составляющая сигнала управления, q(t) - составляющая шумов и помех. Синтез оптимальных фильтров производится с максимальным использованием известной априорной информации как о сигналах, которые необходимо выделять, так и о шумах и помехах. Как правило, используется информация о природе полезного сигнала и шума, об их спектральном составе, о корреляционных и взаимных корреляционных характеристиках. Наличие определенных особенностей (различий) в характеристиках сигнала и шума позволяет реализовать фильтр вообще и оптимальный фильтр в частности. Если такие особенности отсутствуют, постановка задачи становится некорректной.
При наличии помех абсолютно точное выделение полезного сигнала методами линейной фильтрации, как правило, невозможно. Результат фильтрации
z(t) = h(t) ③ u(t-t) (4.6.1)
отличается от s(t) на величины e(t) = z(t)-s(t), которые являются абсолютными значениями погрешности воспроизведения полезного сигнала по координатам t. Качество фильтра оценивается средним значением квадрата величины e(t):
 . (4.6.2)
. (4.6.2)
Выражение (4.6.2) дает возможность определить функцию h(t) фильтра по критерию минимума среднего квадратического отклонения выходного сигнала от его действительной или заданной формы.
Фильтр Винера является оптимальным фильтром формирования из входного сигнала u(t) выходного сигнала z(t) при известной форме полезного сигнала s(t), который содержится во входном сигнале в сумме с шумами. В качестве критерия его оптимизации используется среднее квадратическое отклонение сигнала z(t) на выходе фильтра от заданной формы сигнала s(t). Подставим уравнение свертки (4.6.1) в раскрытой форме интегральной свертки в выражение (4.6.2) и получим отклонение e2 выходного сигнала z(t) от заданной формы выходного сигнала s(t):
 . (4.6.3)
. (4.6.3)
Минимум выражения (4.6.3) определяет функцию импульсного отклика h(t) оптимального фильтра. При этом для оптимального фильтра действительно выражение:
h(t) ③ Ku(t) = Kzu(t). (4.6.4)
Другими словами, свертка функции отклика оптимального фильтра с функцией автокорреляции входного сигнала должна быть равна функции взаимной корреляции выходного и входного сигналов.
Отметим, что Ku(t) = Ru(t)+Rq(t), где Ru - функция автокорреляции сигнала, Rq - функция автокорреляции шума, а Kzu(t) = Bzs(t)+Bzq(t), где Bzs - функция взаимной корреляции сигналов z(t) и s(t), Bzq - функция взаимной корреляции сигнала z(t) и помех q(t). Подставляя данные выражения в (4.6.4), получаем:
h(n) ③ [Ru(t)+Rq(t)] = Bzs(t)+Bzq(t). (4.6.5)
Частотная характеристика фильтра находится преобразованием Фурье левой и правой части уравнения (4.6.5):
H(w)[Wu(w)+Wq(w)] = Wzs(w)+Wzq(w),
H(w) = [Wzs(w)+Wzq(w)] / [Ws(w)+Wq(w)], (4.6.6)
где Ws(w) ó Rs(t) и Wq(w) ó Rq(t) - энергетические спектры (плотности мощности) сигнала и помех, Wzs(w) ó Bzs(t) - взаимный энергетический спектр входного и выходного сигналов, Wzq(w) ó Bzq(t) - взаимный энергетический спектр выходного сигнала и помех.
Обычно имеет место статистическая независимость полезного сигнала, а, следовательно, и сигнала z(t), от шумов, при этом Bzq = 0 и фильтр называют оптимальным по сглаживанию шумов при заданной форме выходного сигнала:
H(w) = Wzs(w) / [Ws(w)+Wq(w)], (4.6.7)
Фильтр (4.6.7) оптимален в том смысле, что максимизирует отношение мощности сигнала к мощности шума по всему интервалу сигнала, но не в каждой индивидуальной точке.
Выражения (4.6.6-4.6.7) достаточно наглядно демонстрируют физический смысл формирования передаточной функции фильтра. При воспроизведении сигнала частотная функция взаимной корреляции входного сигнала с выходным Wzs (плотность взаимной мощности) повторяет частотную функцию автокорреляции Ws (плотность мощности сигнала). Плотность мощности статистических шумов Wq распределена по частотному диапазону равномерно, в отличие от плотности мощности сигнала Ws, которая, в зависимости от формы сигнала, может занимать любые частотные интервалы спектрального диапазона. На частотах, где сосредоточена основная энергия сигнала, имеет место Ws(w)>>Wq(w) и H(w) Þ 1 (как минимум, больше 0.5). Там, где значение Ws(w) становится меньше Wq, коэффициент передачи фильтра становится меньше 0.5, и в пределе H(w)=0 на всех частотах, где полностью отсутствуют частотные составляющие сигнала.
Таким образом, оптимальные фильтры учитывают особенности спектрального состава сигналов и способны формировать передаточные функции выделения полезных частот сигналов из любых диапазонов спектра с максимальных подавлением шумов на всех частотах спектрального диапазона, не содержащих полезных сигналов, при этом границы усиления-подавления устанавливаются автоматически по заданному уровню шумов.
Литература
1. Мирошник И.В. Теория автоматического управления. Линейные системы: Учебное пособие для вузов. - СПб.: Питер, 2005. - 336 с.
2. Повзнер Л.Д. Теория систем управления: Учебное пособие для вузов. - М.: Изд. МГГУ, 2002. - 472 с.
7. Туманов М.П. Теория автоматического управления: Лекции. URL: http://elib.ispu.ru/library/lessons/Tihonov_2/index.htm.
8. Туманов М.П. Теория управления. Теория линейных систем автоматического управления: Учебное пособие. – МГИЭМ. М., 2005, 82 с. URL: http://window.edu.ru/window_catalog/files/r24738/5.pdf.
11. Михайлов В.С. Теория управления. – К.: Выща школа, 1988.
12. Зайцев Г.Ф. Теория автоматического управления и регулирования. – К.: Выща школа, 1989.
Тема 5. ЦИФРОВЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Недостающую глубину мысли обычно компенсируют ее длиной.
Шарль Луи Монтескье. Французский философ. XVIII в.
Идеальная система автоматического управления производством – кнопка включения в кабинете директора фирмы. В сопроводительной документации на систему достаточно одной фразы "Не выключать до полного банкротства". Коротко и элегантно.
Эдуард Астафьев. Уральский геофизик, ХХ в.
Содержание
Введение.
1. Дискретные системы автоматического управления. Особенности дискретного управления. Решетчатая функция. Импульсная модуляция. Параметры импульсных элементов. Функциональные схемы цифровых систем. Преобразователи АЦП. Преобразователи ЦАП. Управление системами на базе ЭВМ.
2. Цифровые средства обработки информации в системах. Аналоговые электронно-вычислительные машины. Цифровые электронно-вычислительные машины. Микро-ЭВМ и микроконтроллеры.
3. Сетевые компоненты систем. Архитектура открытых информационных систем. Локальные управляющие вычислительные сети. Топологии локальных сетей. Топология «шина». Топология «звезда». Топология «кольцо».
Введение
Дискретные системы отличаются от непрерывных тем, что среди сигналов, действующих в системе, имеются дискретные сигналы. Дискретные сигналы получаются из непрерывных квантованием по уровню, по времени или одновременно и по уровню, и по времени. Системы, в структуре которых используются цифровые устройства, контроллеры, микропроцессоры, ЭВМ, являются дискретными.
Дискретные системы (ДС) находят широкое применение в управлении разнообразными техническими устройствами. Область применения ДС - управление различными электромеханическими и электромагнитными устройствами, системами телеизмерения и телеуправления, многоканальными системами связи, системами радиоуправления и т. д.
В современных условиях сохраняется устойчивая тенденция увеличения доли цифровых методов преобразования, обработки, передачи и хранения информации во всех сферах деятельности человека, идёт смена поколений технических средств обработки информации и информационного обмена. Эти средства могут непосредственно не затрагивать традиционные области автоматизации: датчики, приводы, регуляторы, однако меняют среду существования средств автоматизации в целом.
В период бурного развития микропроцессорной техники (80-е годы 20-го века) было разработано и внедрено огромное количество технических устройств для систем автоматического управления с жёсткой логической структурой, обладавших вполне удовлетворительными характеристиками. Вместе с тем становилось ясно, что только использование перепрограммируемых и универсальных устройств обеспечит будущее технических средств автоматики. На этом этапе произошло разделение путей развития систем управления на две линии: на основе универсальных ЭВМ, и на основе контроллеров и более простых ЭВМ, но зато оптимизированных для требуемой задачи. Оба подхода получили право на жизнь, а их разумное сочетание обеспечивает высокое качество систем автоматического управления (САУ).
Современные проекты объединяет широкое использование готовых аппаратных и программных технологий открытого типа, апробированных и стандартизованных на рынке общепромышленных гражданских приложений, наряду с развитием и совершенствованием традиционных средств автоматизации. Контроллеры средств автоматизации обычно вынуждены работать в жёстких условиях эксплуатации, а цена сбоя в системе автоматического управления также может быть гораздо выше, чем в других информационных системах, так как объект управления нуждается в управлении постоянно и в реальном времени.
В САУ обычно имеется большое количество разнообразных датчиков и преобразователей информации физических величин, таких, как температура, давление, расход жидкостей, скорость и т.п. Датчики преобразуют исходную физическую величину в некоторую стандартную величину, например, напряжение. При использовании в САУ ЭВМ встаёт задача преобразования этой промежуточной величины в цифровую форму, появилось и стремительно развивается новое поколение датчиков, в которых имеются встроенные контроллеры, осуществляющие такое преобразование. Такой интеллектуальный датчик сам становится элементом вычислительной сети, поддерживающим сетевой протокол и передающим данные в цифровой форме. Часто в контроллере такого датчика производится предварительная цифровая обработка сигнала, например, коррекция систематической погрешности преобразователя, предварительная фильтрация случайных помех, а также контроль работоспособности. Всё больше технических средств САУ становятся чисто цифровыми, в которых преобразование физических данных происходит непосредственно в цифровую форму, подготовленную к передаче по каналу связи.
Цифровыми и интеллектуальными (со встроенными микроконтроллерами) в САУ могут быть и другие составные части: исполнительные устройства, каналы связи, задатчики воздействий, фильтры и т.п. Кроме перепрограммируемости, это даёт повышение надёжности за счёт гибкости конфигурации. Количество компьютеров, используемых для управления процессами производства и в задачах управления, нарастает практически экспоненциально.
5.1. ДИСКРЕТНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ [10, 11, 12].
Особенности дискретного управления. Работа дискретных систем связана с воздействием, передачей и преобразованием последовательности импульсов. В отдельные точки ДС сигналы управления поступают в некоторые заданные или произвольные промежутки времени. Характерной чертой любой ДС является наличие импульсных элементов (ИЭ), с помощью которых осуществляется преобразование непрерывных величин в последовательности дискретных сигналов.
Современная теория управления располагает универсальным методом исследования дискретных систем на основе специального математического аппарата - дискретного преобразователя Лапласа, который позволил максимально приблизить методологию исследования ДС к методологии исследования непрерывных систем. Однако работа ДС связана с квантованием непрерывных сигналов и теория управления дискретными системами имеет особенности, обусловленные наличием в этих системах импульсных элементов.
При квантовании по уровню непрерывный сигнал х(t) преобразуется в последовательность дискретных сигналов, фиксированных в произвольные моменты времени при условии Dx = const. Системы, в которых используются сигналы, квантованные по конечному числу уровней (часто 2-3 уровня), называются релейными системами. Квантование по уровню является нелинейным преобразованием сигналов, следовательно, релейные системы относятся к классу нелинейных систем.
При квантовании по времени сигналы фиксируются в дискретные моменты времени Dt = const. При этом уровни сигнала могут принимать произвольные значения. Системы, реализующие квантование сигналов по времени, называются импульсными системами (ИС). Квантование по времени осуществляется импульсным элементом, который в частном случае пропускает входной сигнал х(t) лишь в течение некоторого времени.
При квантовании по уровню и по времени непрерывный сигнал заменяется дискретными уровнями, ближайшими к значениям непрерывного сигнала в дискретные моменты времени Dt = const. Дискретные системы, реализующие сигналы, квантованные по уровню и по времени, называются релейно-импульсными, или цифровыми. В этих системах квантование по уровню и по времени осуществляется кодоимпульсным модулятором или цифровым вычислительным устройством.
Решетчатой функцией называется функция, получающаяся в результате замены непрерывной переменной на дискретную, определенную в дискретные моменты времени nТ, n=0,1, 2, … Непрерывной функции x(t) соответствует решетчатая функция х(nТ), где Т – период квантования, при этом непрерывная функция является огибающей решетчатой функции. При заданном значении периода квантования Т непрерывной функции x(t) соответствует однозначная решетчатая функция х(nТ). Однако обратного однозначного соответствия между решетчатой и непрерывной функцией в общем случае не существует, так как через ординаты решетчатой функции можно провести множество огибающих.
Отсчеты по шкале времени удобно вести в целочисленных единицах периода квантования Т. С этой целью вместо переменной t непрерывной функции введем новую переменную t=t/T, при этом непрерывной функции x(t) будет соответствовать решетчатая функция х(n) º xn.
Импульсная модуляция. Последовательность импульсов в ИС подвергается импульсной модуляции. Процесс импульсной модуляции состоит в изменении какого-либо параметра периодически повторяющихся импульсов. Применительно к немодулированной последовательности импульсов (рис. 5.1.1, а) такими параметрами являются амплитуда импульсов А, длительность bT, и период повторения Т. Величина, определяющая закон модуляции, называется модулирующей величиной.
Если по закону изменения модулирующей величины изменяется амплитуда импульсов, то модуляция называется амплитудно-импульсной (АИМ), если изменяется ширина - широтно-импульсной (ШИМ), при изменении периода - временно-импульсной модуляцией (ВИМ).
|
Рис. 5.1.1. |

Вид модуляции, при которой параметры последовательности импульсов изменяются в зависимости от значений модулирующей величины в фиксированные равноотстоящие друг от друга моменты времени, называется импульсной модуляцией первого рода (рис. 5.1.1, в). В этом случае модулируемый параметр амплитуда, ширина или частота импульса, определяется значением модулирующей величины в равноотстоящие дискретные моменты времени.
Вид модуляции, при которой модулируемые параметры последовательности импульсов изменяются в соответствии с текущим значением модулирующей величины, называется импульсной модуляцией второго рода (рис. 5.1.1, г). В этом случае модулируемый параметр изменяется в течение времени существования импульса.
Параметры импульсных элементов (ИЭ), выполняющих в системах управления дискретизацию аналоговых сигналов и модуляцию импульсов.
Коэффициент усиления kи импульсного элемента - отношение величины модулируемого параметра импульсов к величине входного сигнала хвх(t) в соответствующий дискретный момент времени. Например, коэффициент усиления амплитудного импульсного элемента kи = А/xвх, где А - амплитуда импульса, хвх - соответствующее дискретное значение входной величины.
Период повторения импульсов Т или частота повторения импульсов w0 = 2p/Т.
Длительность импульсов t=bТ, где b - скважность импульсов, показывающая, какую часть периода повторения импульсов занимает длительность импульса.
Форма импульса S(t) может быть прямоугольной, треугольной, синусоидальной, экспоненциальной, и пр.
Характеристика импульсного элемента - зависимость величины модулируемого параметра импульсов от соответствующих дискретных значений входной величины. Может быть как линейной, так и нелинейной (например, логарифмической), а также комбинированной.
Импульсные элементы разнообразны по конструкции (механические, электромеханические, фотоэлектрические, электронные). В качестве импульсного элемента может быть как простейший ключ, так и любое сложное устройство, например, контроллер. Наиболее широкое применение на практике получили амплитудные импульсные элементы, осуществляющие амплитудно-импульсную модуляцию первого и второго рода. В дальнейшем будем рассматривать, в основном, импульсные системы с амплитудными импульсными элементами первого рода.
Импульсные системы также могут быть линейными и нелинейными. В линейных ИС соблюдается принцип суперпозиции: реакция ИС на сумму воздействий равна сумме реакций на каждое воздействие в отдельности. В этих системах параметры импульсного элемента не зависят от внешних воздействий и переменных, характеризующих состояние системы. К линейным ИС относятся, например, амплитудно-импульсные системы с линейной непрерывной частью и с линейной характеристикой импульсного элемента. В дальнейшем будут рассматриваться линейные импульсные системы, в которых ИЭ может быть включен до непрерывной части, после нее или между отдельными частями непрерывной системы. В замкнутых ИС импульсный элемент может находиться в прямой части системы, в цепи обратной связи или вне замкнутого контура.








