 2020-06-08
2020-06-08 120
120Рассмотрим движение плоской фигуры (рис. 3.2). Для этого выберем неподвижную систему координат Оху. Выберем на плоской фигуре точку С, которую будем называть полюсом и проведем через нее систему координат, которая будет двигаться вместе с телом.
Положение точки С в любой момент времени определяется координатами полюса. Само тело при этом может поворачиваться вокруг полюса. Величину этого поворота определяет угол  (угол между осями х и х').
(угол между осями х и х').

Рис.3.2
Координаты полюса и угол поворота при движении меняются, то есть зависят от времени. Соответствующие формулы называются уравнениями плоскопараллельного движения:
 (3.1)
(3.1)
Из этих уравнений можно найти основные кинематические характеристики тела при плоском движении:
· скорость  и ускорение
и ускорение  полюса,
полюса,
· угловую скорость  и угловое ускорение
и угловое ускорение  тела.
тела.
Важно заметить, что:
· плоское движение можно представить как совокупность двух движений: поступательного и вращательного,
· угол поворота () и кинематические характристики вращательной части движения ( и ) не зависят от выбора полюса,
· координаты полюса ( ,
,  ) и кинематические характеристики поступательной части движения ( и ) зависят от выбора полюса.
) и кинематические характеристики поступательной части движения ( и ) зависят от выбора полюса.
Уравнения (3.1) позволяют найти скорость и ускорение полюса ( и ). Ниже рассмотрим, как найти скорости и ускорения других точек тела.
3.2. Теорема о сложении скоростей при плоском движении
ТЕОРЕМА
Скорость точки плоской фигуры равна векторной сумме скорости полюса и скорости, которую эта точка имеет в относительном вращении этой фигуры вокруг полюса:
 . (3.2)
. (3.2)
Доказательство
Рассмотрим плоскую фигуру. Выберем на ней две точки С и М. Точку С будем считать полюсом (рис. 3.3). Покажем радиус-векторы  и
и  , а также вектор
, а также вектор  , проведенный из точки С к точке М.
, проведенный из точки С к точке М.
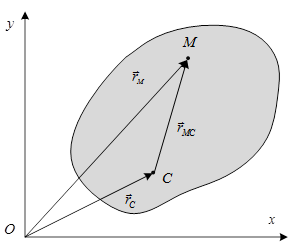
Рис. 3.3
Для любого момента времени справедливым будет равенство
 .
.
Дифференцируя равенство, получим:
,
где  - скорость точки М,
- скорость точки М,
 - скорость точки С,
- скорость точки С,
 - скорость точки М в движении тела, происходящем относительно полюса С. Это движения является вращением, поскольку модуль вектора
- скорость точки М в движении тела, происходящем относительно полюса С. Это движения является вращением, поскольку модуль вектора  .
.
Теорема доказана.
Направление и модуль вектора  определяется по правилам, принятым для вращательного движения:
определяется по правилам, принятым для вращательного движения:
· скорость перпендикулярна отрезку МС и направлена в сторону вращения,
· модуль скорости вычисляется по формуле Эйлера:
 (3.3)
(3.3)
Графически направление и модуль скорости  можно получить, построив параллелограмм на векторах
можно получить, построив параллелограмм на векторах  и
и  , как это показано на рис. 3.4,а.
, как это показано на рис. 3.4,а.
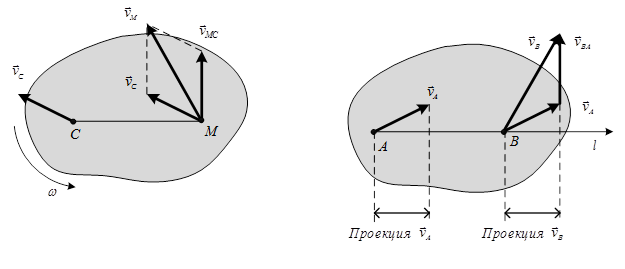 Рис. 3.4 Рис. 3.5
Рис. 3.4 Рис. 3.5
СЛЕДСТВИЕ ИЗ ТЕОРЕМЫ:








