 2020-06-08
2020-06-08 1091
1091Отличительной особенностью САР по отношению к САК и САУ является ее работа лишь с одним технологическим параметром и соответственно с одним исполнительным механизмом, воздействующим на этот параметр.
Задача САР — поддержание постоянного значения регулируемого параметра или его изменение по заданному закону.
Работа систем автоматического регулирования основана на двух основных принципах регулирования:
1) по отклонению регулируемого параметра от заданного значения или закона;
2) по компенсации внешних возмущающих воздействий на технологический процесс.
В первом случае автоматическая система должна следить за значением параметра и при его отклонении от заданного создавать такое управляющее воздействие на исполнительный механизм, которое обеспечит возврат параметра к нужному значению.
Откуда система знает, каким должно быть значение параметра? Для ввода в систему этой информации используют устройство, называемое задатчиком. Оно формирует такой же сигнал, какой поступает с датчика при значении регулируемого параметра, равном заданному. Если отклонения параметра нет, то оба сигнала одинаковы и система регулирования находится в равновесии. При отклонении значения параметра от заданного, вызванном возмущающим воздействием на технологический процесс, специальное устройство сравнения обнаруживает разницу между сигналами, усиливает ее, превращает в двоичный код и передает на ЭВМ, которая вырабатывает управляющее воздействие на исполнительный механизм.
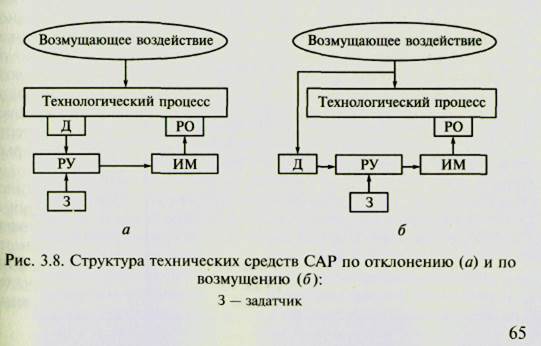
Совокупность устройства сравнения, усилителя, аналого-цифрового преобразователя и ЭВМ, роль которой, как правило, выполняет микропроцессор, можно рассматривать как регулирующее устройство (РУ) (рис. 3.8).
Исполнительный механизм управляет рабочим органом, действующим на технологический процесс, так, чтобы отклонение параметра от заданного значения уменьшалось. Воздействие продолжается до тех пор, пока реальное значение регулируемого параметра не станет вновь равным заданному. Если заданное значение параметра (и соответственно сигнал, поступающий от задат-
64
чика) не изменяется с течением времени, то система называется стабилизирующей.
Если сигнал, формируемый задатчиком, изменяется по какому-то закону, то система регулирования следит за тем, чтобы сигнал с датчика параметра изменялся точно так же, т.е. чтобы параметр изменялся по тому же закону. Задатчик задает тот закон, по которому должен изменяться параметр. Возможны два варианта формирования такого сигнала задатчиком: либо в соответствии с заранее составленной программой изменения параметра с течением времени (в этом случае САР называют системой программного регулирования), либо в зависимости от изменения какого-то другого параметра, за которым следит задатчик (в этом случае САР называют следящей). В любом случае действия системы направлены на устранение отклонения параметра от значения (постоянного или изменяющегося), определенного задатчиком.
На рис. 3.8, а показана структура технических средств САР по отклонению параметра.
Достоинство регулирования по отклонению заключается в том, что регулируемый параметр всегда находится под контролем автоматической системы. Но есть и недостаток — процесс регулирования начинается лишь тогда, когда отклонение параметра от заданной величины уже не только появилось, но и достигло порога чувствительности устройства сравнения. Например, в помещении установлена система автоматического регулирования температуры по отклонению. До тех пор пока не появилось внешнее воздействие, температура равна 20 °С. Датчик температуры установлен в центре помещения. Кто-то открыл окно на улицу, где температура равна -20 °С. Температура у открытого окна начинает резко падать, однако в центре комнаты она еще не изменилась, следова-
тельно, регулятор пока не действует. Только после того как в половине помещения похолодает и температура начнет падать вблизи датчика, регулятор вступит в действие.
Этот недостаток регулирования по отклонению отсутствует в системе регулирования по компенсации возмущающих воздействий. Структура технических средств такой системы приведена на рис. 3.8, б.
Ее отличие от предыдущей структуры заключается в том, что на датчик воздействует не параметр технологического процесса, а внешнее возмущение. Обычно влияние возмущающего воздействия на технологические параметры проявляется с некоторой задержкой, что позволяет выработать регулирующее воздействие на рабочий орган еще до того, как параметр под действием возмущения изменит свое значение.
При регулировании температуры в помещении можно пойти и по пути компенсации возмущающего воздействия. После открытия окна система получает информацию о том, насколько оно открыто, какова площадь окна, какова температура за окном и т.д. На основе полученной информации она вырабатывает управляющее воздействие на нагреватель еще до того, как регулируемый параметр (температура в центре комнаты) изменит свое значение.
Такая оперативность является достоинством этого принципа регулирования, но отсутствие непосредственного контроля самого регулируемого параметра — его недостаток.
Наиболее совершенны комбинированные САР, использующие одновременно оба принципа регулирования. При этом сохраняются достоинства обоих принципов и уменьшаются их недостатки.
Особый вид САР — системы адаптивного регулирования. Они используются для поддержания оптимальных режимов тех технологических процессов, для которых может быть определен показатель эффективности процесса. Если этот показатель зависит от параметров, которые система может учесть, то появляется возможность добиться максимального значения эффективности. Адаптивная система автоматически корректирует управление процессом в зависимости от комплекса таких воздействий на него, учесть которые по отдельности невозможно (изменение качества сырья, отложения на стенках трубопровода и т.д.).
Работает адаптивная САР следующим образом: ЭВМ изменяет на небольшую величину параметры в алгоритмах управления и вычисляет показатель эффективности при новых значениях параметров. Если показатель растет, то ЭВМ вновь изменяет параметры в том же направлении и вновь вычисляет показатель эффективности. И так до тех пор, пока не будет достигнута максимальная эффективность. Периодическое проведение такой коррекции
66
гспечивает оптимальный режим технологического процесса и г эоты технологического оборудования.

