 2020-06-10
2020-06-10 156
156Схема стенда и его внешний вид приведены на рис. 2.1 и 2.2. На рисунках обозначено: СС - силовой стол агрегатного станка УН4515; ГЦ - гидроцилиндр дифференциальный ГЦП 110*80*630; ПП и ШП - поршневая и штоковая
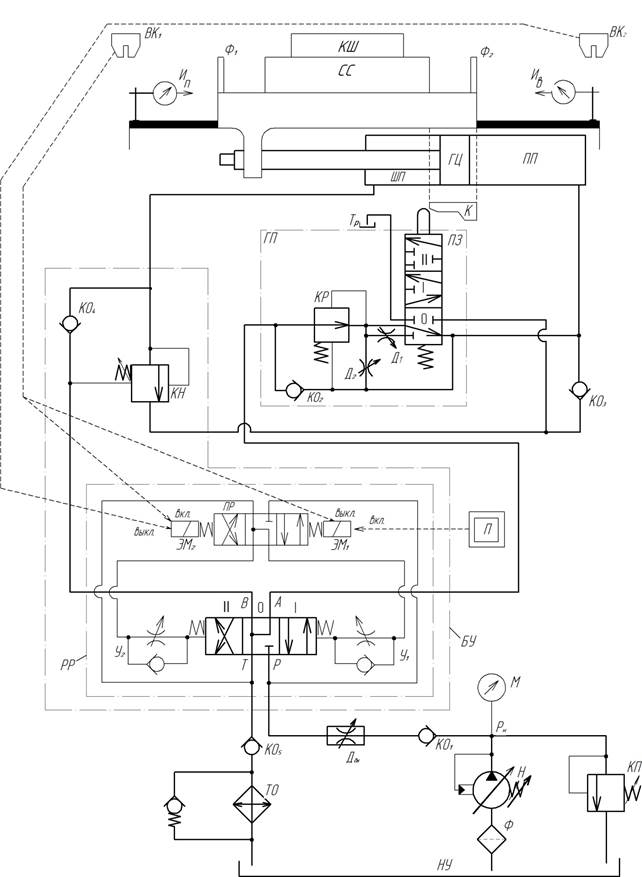
Рис.2.1. Схема гидропривода подачи силового стола
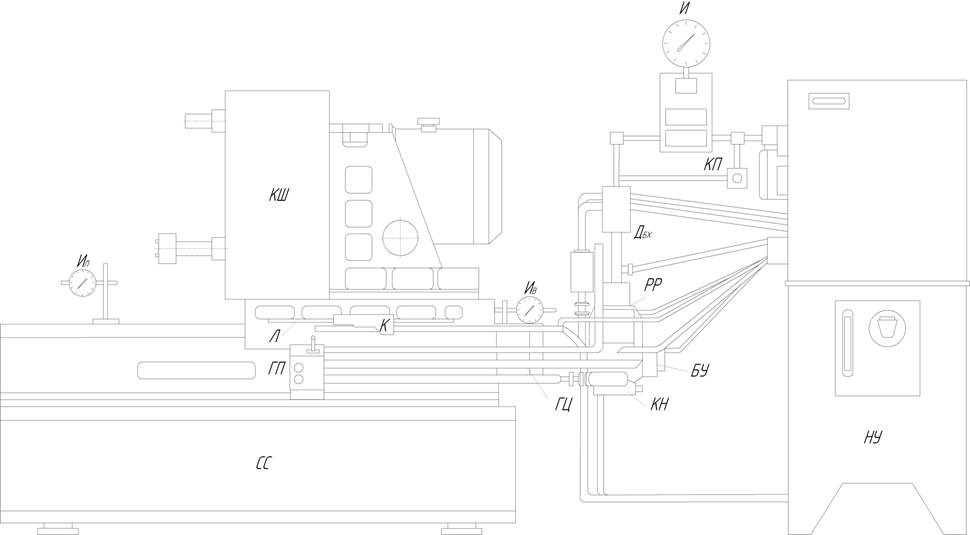
Рис.2.2. Внешний вид стенда для исследования гидропривода подачи силового стола.
полости; КШ - коробка шпиндельная; ГП - гидропанель с путевым управлением 2ПГ36-14; ПЗ - путевой золотник; КР - клапан редукционный; Д1 и Д2 - дроссели; КО2 - обратный клапан; БУ - гидроблок управления; РР - реверсивный распределитель Р202АЛ34; КН - клапан напорный ПГ54-34; КО4 - клапан обратный МКО 20-32; НУ - насосная установка 1БГ48-74; Н - насос пластинчатый регулируемый Г12-55 АМ; Ф - фильтр ФВСМ.63 -80; КП - клапан переливной Г52-24; КО1, КО5 – клапаны обратные Г51-35; ДБХ - дроссель КВМК 25; ТО - теплообменник; КО3 - клапан обратный Г51-34; М - манометр МО-11203; ЭМ1 и ЭМ2 - электромагниты; К - кулачок управления; Ф1 и Ф2 - флажки управления; ВК1 и ВК2 - выключатели конечные БВК-4; ИП и ИВ - индикаторы ИЧ.
Агрегатные станки предназначены для обработки конкретных изделий в крупносерийном и массовом производстве и компонуются из специальных и нормализованных узлов. Важнейшие узлы агрегатных станков разработаны в виде гаммы стандартных типоразмеров. Одним из нормализованных узлов является силовой стол, предназначенный для осуществления движения подачи. На подвижном элементе стола (платформе), как правило, устанавливается шпиндельная коробка, представляющая собой автономный привод главного движения, в котором от электродвигателя приводятся во вращение несколько шпинделей с закрепленными в них режущими инструментами.
Рассматриваемый гидропривод обеспечивает движение стола по циклу: "Быстрый подвод (БП) - 1-я рабочая подача (1РП) - 2-я рабочая подача (2РП) - быстрый отвод (БО) - стоп ". Изменение направления движения и остановка стола осуществляется реверсивным распределителем РР с электрогидравлическим управлением, а переключение с БП на 1РП и 2РП - гидропанелью ГП. В схеме применяется дроссельное регулирование скорости на входе в гидроцилиндр ГЦ с помощью дросселей ДБХ (быстрых ходов), Д1 и Д2 (рабочих ходов).
Для стабилизации скорости рабочей подачи в условиях переменных нагрузок применяется редукционный клапан КР, который поддерживает постоянный перепад давлений на дросселях Д1 и Д2, а также в сливной линии установлен напорный клапан КН, который поддерживает необходимое противодавление (0.3...0.9 МПа) в штоковой полости ШП, обеспечивая двухстороннюю жесткость ГЦ.
Настройка величины перемещения стола на разных этапах цикла, а также подача команд на переключение этапов производится с помощью кулачка К, флажков Ф1 и Ф2 и конечных выключателей ВК1 и ВК2, причем конечные выключатели установлены неподвижно на станине, а кулачок и флажки - на столе на специальных линейках (например Л, см. рис.2.2). Кулачок и флажки могут перемещаться вдоль линеек при настройке привода, а затем жестко фиксируются в необходимой позиции. Давление рН на выходе из насоса Н регулируется переливным клапаном КП и контролируется манометром М.
Гидропанель ГП включает в себя путевой золотник ПЗ (распределитель 5/3 с механическим управлением от кулачка К), редукционный клапан КР, обратный клапан КО2 и два дросселя Д1 и Д2, размещенные в общем корпусе.
Блок управления БУ включает три нормализованных гидроаппарата стыкового исполнения: распределитель 4/3 с электрогидравлическим управлением (РР), напорный клапан КН и обратный клапан КО4, - установленные на гранях общего корпуса (параллелепипеда).
Обратные клапаны КО1 и КО5 предназначены для предотвращения слива жидкости в бак при выключенном насосе.
Гидропривод работает следующим образом.
При включении кнопки П ("Пуск") включается электромагнит ЭМ1, под действием которого пилот ПР включается в правую (по схеме) позицию. Жидкость из напорной линии Р проходит в канал У1 и переключает основной золотник распределителя РР в позицию I. Осуществляется быстрый подвод (БП) стола (влево по схеме), при котором поток жидкости проходит следующим образом:




 Н——КО1—ДБХ—Р (РР) А—КР——ПЗ——ГЦ (ПП) / ГЦ (ШП) — КН—KО3— — КП—бак НУ —Д2— ———————————————
Н——КО1—ДБХ—Р (РР) А—КР——ПЗ——ГЦ (ПП) / ГЦ (ШП) — КН—KО3— — КП—бак НУ —Д2— ———————————————
При этом гидроцилиндр включается по дифференциальной схеме, т.е. жидкость, вытесняемая из штоковой полости ШП, поступает в поршневую полость ПП. Скорость БП регулируется дросселем ДБХ.
После окончания БП кулачок К своей первой ступенью нажимает на ролик ПЗ и переключает его в позицию I, осуществляется первая рабочая подача (1РП), при которой поток жидкости проходит так:

 Н——КО1—ДБХ—Р(РР)А—КР—Д1—ПЗ—— ГЦ(ПП) / ГЦ(ШП)— КН—ПЗ—ТР—бак НУ —Д2——
Н——КО1—ДБХ—Р(РР)А—КР—Д1—ПЗ—— ГЦ(ПП) / ГЦ(ШП)— КН—ПЗ—ТР—бак НУ —Д2——
——КП——————————————————————————————
Здесь и на следующих этапах цикла гидроцилиндр включается по простой схеме. Скорость 1РП регулируется, главным образом, дросселем Д1.
После окончания 1РП кулачок К своей второй ступенью нажимает на ролик ПЗ и включает его в позицию II, осуществляется вторая рабочая подача (2РП), при которой поток жидкости проходит так:
 Н———КО1—ДБХ—Р (РР) А—КР—Д2—ГЦ (ПП) / ГЦ (ШП)— КН—ПЗ—ТР——бак НУ
Н———КО1—ДБХ—Р (РР) А—КР—Д2—ГЦ (ПП) / ГЦ (ШП)— КН—ПЗ—ТР——бак НУ
—————————————————— КП————————————
Скорость 2РП регулируется дросселем Д2. После окончания второй рабочей подачи флажок Ф1 входит в паз конечного выключателя ВК1, замыкая его электрическую цепь, выключается ЭМ1 и включается ЭМ2, под действием которого пилот ПР включается в левую позицию. Жидкость из напорной линии Р проходит в канал У2 и переключает основной золотник распределителя РР в позицию II. Осуществляется быстрый отвод (БО) стола (вправо по схеме), при котором поток жидкости проходит так:

 Н——КО1—ДБХ—Р (РР) В—КО4—ГЦ (ШП) / ГЦ (ПП)— КО2—А (РР) Т –КО5—ТО—бак НУ
Н——КО1—ДБХ—Р (РР) В—КО4—ГЦ (ШП) / ГЦ (ПП)— КО2—А (РР) Т –КО5—ТО—бак НУ
————————————————————— КП ———————————
Скорость БО регулируется дросселем ДБХ, т.е. так же как и при БП. Благодаря этому, а также тому, что при БП гидроцилиндр включается по дифференциальной схеме, скорости БП и БО одинаковы.
В конце БО флажок Ф2 входит в паз конечного выключателя ВК2, замыкая его электрическую цепь, выключается ЭМ2, под действием пружин пилот ПР включается в исходную среднюю позицию. Оба канала управления У1 и У2 соединяются со сливной линией и под действием пружин основной золотник РР включается также в исходную среднюю позицию 0. Проход жидкости от насоса в систему прекращается, и она сливается в бак НУ через клапан КП.
В гидроприводе применяется регулируемый насос Н с автоматическим управлением по давлению, поэтому его производительность автоматически устанавливается равной расходу жидкости через дроссель, что позволяет повысить к.п.д. привода.
Система управления обеспечивает работу стенда в трёх режимах: наладочном, автоматическом одноцикловом и автоматическом многоцикловом.
В наладочном режиме движение стола влево или вправо происходит только при нажатии соответствующей кнопки ("влево" или "вправо"). В автоматическом одноцикловом режиме после пуска привода от кнопки П стол автоматически совершит движение по заданному циклу и остановится в исходном положении. В автоматическом многоцикловом режиме стол многократно автоматически совершает движения по заданному циклу.
Для обеспечения безударной работы в рассматриваемом гидроприводе применяется управление торможением по пути и по времени.
Первый способ имеет место при переключении стола с БП на 1РП, когда кулачок К воздействует своей рабочей поверхностью на ролик ПЗ и перемещает его вниз, плавно уменьшая площадь проходного сечения для жидкости, поступающей в поршневую полость ГЦ. В этом случае величина перемещения золотника z является функцией от перемещения стола x, которая в данном случае имеет вид:
Z = X * tg α,
где α - угол наклона рабочей поверхности кулачка.
Управление торможением по времени применяется при остановке стола в исходном положении после БО, когда по команде от ВК2 выключается ЭМ2, срабатывает ПР, а затем перемещается основной золотник РР, плавно уменьшая площадь проходного сечения для жидкости, вытесняемой из поршневой полости ГЦ. В этом случае величина перемещения золотника z определяется характеристиками электромагнита и имеет вид:
Z = υZ * t,
где υZ - скорость перемещения золотника,
t - время.
Одним из важных требований, предъявляемых к гидроприводу подачи, является стабильность координаты перехода с БП на РП и остановки в исходном положении.
4. Методика экспериментального исследования разброса координаты остановки стола при управлении торможением по пути и по времени
Для определения координаты остановки стола на направляющих станины устанавливаются две стойки с индикаторами ИП и ИВ часового типа. Индикатор ИП измеряет координату остановки стола при управлении по пути (XП), а индикатор ИВ - координату при управлении по времени (XВ). Для того, чтобы стол после БП не переходил на 1РП, а останавливался, необходимо полностью закрыть дроссели Д1 и Д2. Исследование разброса осуществляется при неизменных параметрах привода (давление питания, скорость стола, противодавление и т.д.). В этом случае при многократном выведении стола в одну и ту же точку будет иметь место разброс координаты этой точки, обусловленный случайными факторами (непостоянство сил трения, сил прилипания, утечек и другими). Величину этой координаты можно считать подчиняющейся закону нормального распределения и разброс оценивать количественно величиной среднеквадратичного отклонения σ и зоны рассеивания, равной ± 3σ. Вероятность попадания значений в эту зону составляет 99.73 %. Точность определения σ тем больше, чем большее число замеров произведено. В лабораторной работе число замеров, т.е. число выводов стола в одну и ту же точку принимается равным 25, что соответствует погрешности определения величины σ в пределах ± 15%.
Величины исходных параметров задаются для каждой группы студентов преподавателем. Для заданного варианта необходимо произвести настройку стенда. Закрыть полностью дроссели Д1 и Д2. Установить стойки с индикаторами на направляющих станины таким образом, чтобы в момент остановки стол нажимал на измерительный штифт индикатора и перемещал его примерно на половину всей длины хода.
Включить наладочный режим работы привода. Поочерёдно нажимая на кнопки "влево" и "вправо", переводить стол в крайние положения, выполнив таким образом 25 двойных перемещений стола, и фиксировать с помощью индикаторов координаты точек остановки XП и XВ. Значения этих координат занести в таблицу формы 2.1.
Форма 2.1
| № п/п | 1 | 2 | 3 | 4 | 5 | 6 | ………………23 | 24 | 25 |
| ХП, ММ | |||||||||
| ХВ, ММ |








