 2020-06-29
2020-06-29 76
76Лабораторная работа № 11
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С НЕЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ
Цель работы
Ознакомиться с устройством машины, определить основные ха- рактеристики двигателя и их соответствие номинальным данным, при- обрести навыки по пуску и регулированию скорости двигателя посто- янного тока.
Краткие теоретические и практические сведения
Устройство двигателя постоянного тока не отличается от уст- ройства генератора постоянного тока, поскольку это одна и та же ма- шина, работающая в том или ином режиме. Как и генераторы, дви- гатели различаются по способу включения обмотки возбуждения и об- мотки якоря. В этой лабораторной работе испытывается двигатель па- раллельного возбуждения (шунтовой).
В двигательном режиме машины обмотка якоря питается от сети
током I я. Сила взаимодействия тока с потоком возбуждения Ф создает электромагнитный момент:
М=С м ·I я ·Ф, (11.1)
где С м - конструктивная постоянная машины.
Под действием момента М якорь приходит во вращение. Провод- ники обмотки вращающегося якоря проходят попеременно под полю- сами индуктора разных полярностей. Электромагнитный момент при этом будет иметь постоянное направление лишь в том случае, если ток в проводниках обмотки якоря будет менять направление при каждой перемене полярности находящихся над ними полюсов, т.е. ток в обмот- ке якоря двигателя постоянного тока должен быть переменным. Преоб- разование постоянного тока I, поступающего из сети, в переменный ток в обмотке якоря осуществляется коллектором.
При пересечении магнитного потока возбуждения проводниками обмотки якоря в ней также индуктируется ЭДС, величина которой оп- ределяется формулой:
Е=C Е ·n·Ф, (11.2)
где С Е – конструктивная постоянная машины; n – скорость вращения якоря;
Ф – поток возбуждения.
Однако, в отличие от генератора, эта ЭДС направлена не согласно, а встречно напряжению, приложенному к якорю двигателя, и называет- ся, поэтому, противо-ЭДС.
Соответственно, уравнение равновесия (электрического) двигателя по закону Кирхгофа будет иметь вид
U – E=Iя·Rя или U=E+Iя·Rя, (11.3)
В двигателе параллельного возбуждения цепь обмотки возбужде- ния ОВ подключена параллельно цепи якоря Я. Последовательно с ОВ в цепь возбуждения включается регулировочный реостат Rв, пред- назначенный для регулирования скорости вращения двигателя.
Схема двигателя постоянного тока независимого возбуждения:
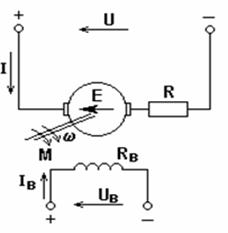
Рис. 11.1.
В двигательном режиме последовательно с якорем включается пусковой реостат R п, предназначенный для снижения тока в момент пуска двигателя. Цепь возбуждения в двигательном режиме подключа- ется таким образом, чтобы она всегда находилась под полным напряже- нием питающей сети U, независимо от того, введен пусковой реостат или выведен (рис. 11.1.). Пуск двигателя постоянного тока осу- ществляется подачей напряжения сети на якорь и обмотку возбужде- ния.
В момент пуска, когда якорь еще не начал вращаться (n=0) ЭДС якоря, как это следует из формулы, также равна нулю и ток в цепи яко- ря в момент пуска достигнет значения:
Ia= (U - Ea) ÷ Ra = U ÷ Ra , (11.4)
При весьма малом сопротивлении якоря (десятые и сотые доли ома) этот ток во много раз превысит номинальный ток двигателя, что недопустимо. Для ограничения пускового тока в цепь якоря двигателя постоянного тока включается пусковой реостат R п (рис.1.), который при пуске двигателя должен быть полностью введен. Сопротивление этого реостата выбирается таким образом, чтобы величина пускового тока не превосходила номинального тока Iяп более чем в 1,5-2 раза.
Iяп= U÷ (Rя+Rп), (11.5)
Искусственное (с помощью пускового реостата) снижение пуско- вого тока приводит, как видно из формулы (1), к соответствующему снижению пускового момента. Чтобы, несмотря на это, сохранить дос- таточную величину пускового момента, двигатель необходимо пускать при максимальном потоке, для чего регулировочный реостат в цепи возбуждения в момент пуска должен быть полностью выведен. Полез- ный момент вращения на валу двигателя М дв меньше электромагнит- ного момента М на величину момента М O, обусловленного механиче- скими и магнитными потерями в якоре; величина этих потерь относи- тельно невелика, поэтому практически можно принимать М дв =М. Мо- мент двигателя М дв, преодолевая момент сопротивления M с на валу, приводит двигатель во вращение. Далее при разгоне двигателя, т.е. по мере увеличения n, обусловленного неравенством моментов (М дв >М C), и соответственного увеличения Е, ток якоря
I я = (U - C E ·n·Ф) ÷ (R я + R П), (11.6)
постепенно уменьшается; поэтому реостат R п постепенно выводится, и при установившемся режиме, когда Мдв=М C пусковой реостат полно- стью выведен, ток якоря достигает значения, определяемого нагрузкой двигателя:
Iя = (U - CE·n·Ф) ÷Rя, (11.7)
Момент сопротивления на валу двигателя M C представляет собой момент сопротивления рабочей машины приводимой в движение дви- гателем. В условиях лаборатории он заменяется тормозным моментом с создаваемым навалу двигателя электромагнитным тормозом. При уве-
личении нагрузки, т.е. момента сопротивления на валу двигателя, воз- никает неравенство М C >М дв. Оно вызывает уменьшение скорости n и соответствующее увеличение тока I Я (7) и электромагнитного момента М (1) до тех пор, пока не наступит равенство М C =М дв при пониженной скорости вращения. При уменьшении нагрузки на валу двигателя мож- но путем аналогичного рассуждения показать, что скорость вращения якоря увеличится, а ток в нем уменьшится.
Таким образом, всякое изменение нагрузки на валу двигателя вы- зывает в нем автоматически такие изменения тока якоря и момента вращения, при которых вновь достигается равенство Мдв=МC,
Зависимости различных величин, характеризующие работу двига- теля, – скорость вращения n, ток якоря I Я, потребляемая мощность Р 1 момент вращения М, коэффициент полезного действия □, от мощности на его валу P 2 при постоянном напряжении питающей сети U и посто- янном токе возбуждения – называются рабочими характеристиками двигателя (рис. 11.2).
 M, n, I a, P 1, h
M, n, I a, P 1, h
Р 1
n
h M
I a
P ном P 2
Рис. 11.2.
Преобразуем уравнение (11.7), решив его относительно скорости вращения. Тогда получим:
n = (U - I я ·R я) ÷C Е ·Ф, (11.8)
Как видно из формулы (11.8), двигатель постоянного тока с парал- лельным возбуждением имеет широкие возможности регулирования скорости при различных нагрузках, так и различную скорость при по- стоянной нагрузке. Это достигается изменением тока возбуждения (или, иначе говоря, изменением потока). Постоянной скорости вра- щения n=const во всем диапазоне нагрузок двигателя от холостого хода (Iях) до номинальной нагрузки (Iян) соответствует регулировочная ха- рактеристика Iв= f (Iя) при n=const (рис. 11.3).
 n м
n м
Рис.3 Регулировочная характеристика двигателя при n = const и M C =var па- раллельного возбуждения.
I b
Рис.4. Регулировочные характеристи- ки двигателя при М C =const n=var по- следовательного возбуждения.
Различной скорости вращения (в определенных пределах) при по- стоянном моменте нагрузки МCна валу двигателя соответствует семей- ство регулировочных характеристик n=f(Iв), каждая из которых по- строена для своего постоянного момента сопротивления (нагрузки). Характеристику n=f(Iв) при МС=0, т.е. при холостом ходе двигателя, иногда называет характеристикой холостого хода (рис. 11.4.).








