 2020-06-29
2020-06-29 97
97
1) Вычерчиваем схему механизма в масштабе μе  в нескольких, например, двенадцати положениях, соответствующих последовательным поворотам кривошипа ОА на 300 (рис.9). За начальное положение кривошипа принимаем ОА0, при котором ползун В занимает крайнее правое положение В0;
в нескольких, например, двенадцати положениях, соответствующих последовательным поворотам кривошипа ОА на 300 (рис.9). За начальное положение кривошипа принимаем ОА0, при котором ползун В занимает крайнее правое положение В0;
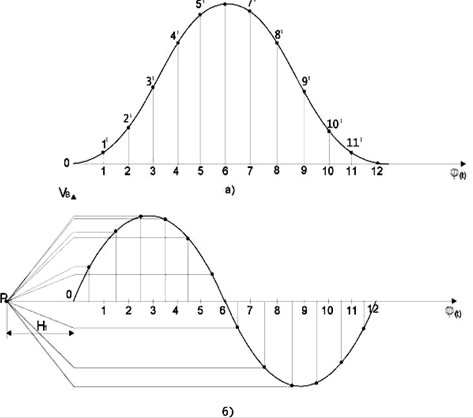
2) строим оси координат SB-t (рис.10а) и на оси абсцисс откладываем отрезок ℓ в мм, изображающий время одного полного оборота кривошипа в масштабе:  ; где:
; где:  рад/мм,
рад/мм,  ;
;
Отрезок ℓ делим на 12 равных частей и в соответствующих точках 1, 2, 3… по оси ординат откладываем расстояния SB1, SB2… пройденные точкой В от ее крайнего правого положения В0.
До крайнего левого положения В6 расстояния возрастают, а начиная с положения В6, они будут уменьшаться; когда кривошип придет в начальное положение А0, ордината кривой (SB-t) будет равна нулю.
3) соединяем последовательно плавной линией полученные точки 0, 1΄, 2΄, 3΄, …. Полученная кривая будет диаграммой расстояний точки В.
Если же по оси абсцисс откладывать углы поворота кривошипа φ, то данная кривая представит функциональную зависимость:

Диаграммы скоростей и ускорений могут быть построены с использованием планов скоростей и ускорений и методов графического дифференцирования:
 .
.
Метод графического дифференцирования:
1) под диаграммой (SB-t) строим оси координат O1VB, O1t (рис.2.10б) и на продолжении оси O1t влево откладываем отрезок O1Р=Н1 мм (произвольно, чтобы дифференциальная кривая разместилась на отведенном для нее месте чертежа);
2) из точки "Р" проводим лучи Р1, Р2, Р3… параллельно хордам кривой (SB-t) на участках 01΄; 1΄2΄; 2΄3΄….
Эти лучи отсекут на оси O1В отрезки 011; 012; 013…, пропорциональные средней скорости Vc на соответствующем участке диаграммы;
3) отложим эти отрезки на средних ординатах соответствующих участков;
4) соединим ряд полученных точек I, II, III…плавной кривой; эта кривая будет диаграммой скорости (V0-t).
Имея диаграмму скоростей, аналогично строим диаграмму ускорений.
При построении диаграмм (V0-t) и (WB-t) данным методом нельзя получить те участки этих диаграмм, которые соответствуют половине крайних участков оси абсцисс. Чтобы закончить построение диаграмм, нужно дополнительно построить средние значения VВ и  для одного-двух участков следующего цикла.
для одного-двух участков следующего цикла.

Рис.9 План положений скоростей
| |
Масштаб диаграмм остается таким же, как и раньше.
Масштабы по осям ординат определяются по формулам:
для диаграммы скоростей:  ;
;
для диаграммы ускорений:  ,
,
Метод построения диаграмм - прост и нагляден, но имеет следующие недостатки:
1) неточность, особенно при дифференцировании кривых с большой кривизной;
2) невозможность полностью исследовать криволинейное движение, т.к. дифференцированием кривой скоростей получаем диаграммы изменения только тангенциальных ускорений;
3) диаграммы дают лишь численные значения векторов, направление которых можно установить лишь после некоторых дополнительных построений.
Метод планов скоростей и ускорений не имеет упомянутых недостатков, поэтому его широко применяют при исследовании различных механизмов.
Литература
1. Артоболевский И.И. Теория механизмов и машин. М, 1975, с.103-182.
2. Кореняко А.С. и др. Курсовое проектирование по теории механизмов и машин. Киев, 1970, с.82-102.








