 2020-06-30
2020-06-30 109
109
Умножение матрицы A на число k:
B = k × A =  ,
,
или, в краткой записи:
B = k × A Û bij = k × aij (i = 1,2,…, m; j = 1,2,…, n) . (19)
Сложение (вычитание) матриц A и B одинаковой размерности:
Cm´n = Am´n ± Bm´n Û cij = aij ± bij (i = 1,2,…, m; j = 1,2,…, n). (20)
Произведение матриц Am´n и Bn´k:
Cm´k = Am´n × Bn´k 
cij = ai1b1j + ai2b2j + ¼ + ainbnj (i = 1,2,…, m; j = 1,2,…, k). (21)
Формулу (21) легко запомнить, как правило умножения «строка на столбец»: произведение матриц Am´n и Bn´k есть матрица Cm´k, у которой элемент cij равен сумме произведений соответствующих элементов i- й строки матрицы A и j- го столбца матрицы В.
Замечание. Перемножать можно только соответственные матрицы А и В, т.е.число столбцов матрицы А должно быть равно числу строк матрицы В.
Если задан многочлен  , то матричным многочленом
, то матричным многочленом  называется выражение
называется выражение
 ,
,
где А – квадратная матрица,  и Е – единичная матрица той же размерности, что и А. Значением матричного многочлена является матрица.
и Е – единичная матрица той же размерности, что и А. Значением матричного многочлена является матрица.
Определители
Определитель второго порядка (определитель квадратной матрицы второго порядка):
det A =  = a 11 a 22 – a 12 a 21. (22)
= a 11 a 22 – a 12 a 21. (22)
Определитель третьего порядка (определитель квадратной матрицы третьего порядка):
det A =  (23)
(23)
Для краткости определитель обозначают: | A | или Δ.
Минором элемента aij определителя называется определитель, которыйполучается из исходного путем вычеркивания i -й строки и j -го столбца (обозначается Mij).
Алгебраическим дополнением элемента aij определителя (обозначается Aij) называется число:
Aij = (–1) i+j× Mij. (24)
Определитель третьего порядка можно вычислить, используя его разложение по 1-й строке:
 , (25)
, (25)
или, в краткой записи:
 ,
,
т.е. определитель равен сумме произведений элементов первой строки на их алгебраические дополнения. Аналогично можно записать разложение определителя по любой другой строке или столбцу.
4. Решение системы трех линейных алгебраических уравнений с тремя неизвестными методом Крамера
Пусть дана система трех линейных алгебраическихуравнений с тремя неизвестными  :
:
 (26)
(26)
(коэффициенты aij и свободные члены bj для i = 1, 2, 3, j = 1, 2, 3 считаются заданными).
Тройка чисел  называется решением системы (26), если в результате подстановки этих чисел вместо все три уравнения системы обращаются в тождества.
называется решением системы (26), если в результате подстановки этих чисел вместо все три уравнения системы обращаются в тождества.
Систему (26) можно переписать в матричном виде:
 , или AX = B,
, или AX = B,
где A – это матрица коэффициентов при неизвестных, Х – столбец неизвестных, В – столбец свободных членов:
Составим определитель матрицы А и три вспомогательных определителя:
 (27)
(27)
Определитель Δ называется главным определителем системы (26). Вспомогательные определители Δ1, Δ2 и Δ3 получаются из Δ заменой элементов соответственно первого, второго и третьего столбцов столбцом свободных членов.
Если определитель  , то существует единственное решение системы (26) и оно выражается формулами:
, то существует единственное решение системы (26) и оно выражается формулами:
 (28)
(28)
Формулы (28) называются формулами Крамера.
5. Решение системы трех линейных алгебраических уравнений при помощи обратной матрицы
Присоединенной (союзной) матрицей к квадратной матрице
А=  называется матрица
называется матрица
 , (29)
, (29)
где  – алгебраические дополнения элементов
– алгебраические дополнения элементов  определителя матрицы А.
определителя матрицы А.
Матрица  называется обратной к квадратной матрице А, если выполнено условие:
называется обратной к квадратной матрице А, если выполнено условие:  , где Е – единичная матрица той же размерности, что и А.
, где Е – единичная матрица той же размерности, что и А.
Обратная матрица существует тогда и только тогда, когда квадратная матрица А – невырожденная, т.е.  .
.
Чтобы найти обратную матрицу  , необходимо:
, необходимо:
а) проверить невырожденность матрицы А, вычислив определитель det A;
б) найти союзную матрицу А * к матрице А;
в) найти обратную матрицу по формуле:
 . (30)
. (30)
Если систему линейных алгебраических уравнений(26) переписать в матричном виде AX = B, то ее решение можно получить матричным способом, т.е. при помощи обратной матрицы:
 , (31)
, (31)
где – обратная матрица для данной матрицы А.
6. Векторы. Операции над векторами
Вектор  может быть представлен в виде:
может быть представлен в виде:
 (32)
(32)
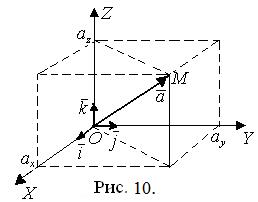 где
где  – проекции вектора
– проекции вектора  на оси координат (координаты вектора), векторы
на оси координат (координаты вектора), векторы  – это орты (единичные векторы) координатных осей (рис. 10).
– это орты (единичные векторы) координатных осей (рис. 10).
Векторную формулу (32) можно писать сокращенно:  = { ax; ay; az }.
= { ax; ay; az }.
Орты  имеют проекции:
имеют проекции:
 ={1; 0; 0},
={1; 0; 0},  ={0; 1; 0},
={0; 1; 0},  ={0; 0; 1}.
={0; 0; 1}.
Модуль (длина) вектора = { ax; ay; az } определяется по формуле:
 . (33)
. (33)
Координатами точки М называют проекции ее радиус-вектора  (рис. 10). Обозначают координаты точки М (x; y; x) или М (xМ; yМ; xМ).
(рис. 10). Обозначают координаты точки М (x; y; x) или М (xМ; yМ; xМ).
Расстояние между точками А (xА , yА, zА) и B (xВ, yB, zB,) определяется по формуле:
 . (34)
. (34)
Если известны координаты точек – начала и конца вектора  :
:
А (xА , yА, zА), B (xВ, yB, zB), то проекции вектора  можно найти по формуле:
можно найти по формуле:
 . (35)
. (35)
Пусть даны векторы = { ax; ay; az } и  = { bx; by; bz }, тогда проекции суммы (разности) векторов:
= { bx; by; bz }, тогда проекции суммы (разности) векторов:
 . (36)
. (36)
Произведение вектора на число: если λ – число и = λ , то
= { λax; λay; λaz }. (37)
Скалярное произведение векторов  и
и  – это число, равное произведению модулей векторов на косинус угла между ними:
– это число, равное произведению модулей векторов на косинус угла между ними:
где φ – угол между векторами и .
Другие обозначения скалярного произведения:  ,
, 
 .
.
Если = { ax; ay; az }, = { bx; by; bz }, то скалярное произведение
 (38)
(38)
При помощи скалярного произведения можно найти угол между векторами:
 (39)
(39)
а также проекцию одного вектора на ось другого вектора:
 (40)
(40)
Векторное произведение вектора на вектор – это вектор  , удовлетворяющий трем условиям:
, удовлетворяющий трем условиям:
1)  ,
,  ;
;
2) векторы  , и
, и  образую правую тройку;
образую правую тройку;
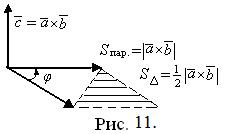
3)  , то есть | | равен площади параллелограмма, построенного на векторах и (рис. 11).
, то есть | | равен площади параллелограмма, построенного на векторах и (рис. 11).
 Обозначения векторного произведения:
Обозначения векторного произведения:  ,
,  .
.
Если = { ax; ay; az }, = { bx; by; bz }, то векторное произведение можно вычислить при помощи определителя: 
или, с использованием формулы (25):
 (41)
(41)
Векторное произведение используют, когда нужно найти вектор , перпендикулярный двум данным векторам и :  , а также для вычисления площади параллелограмма (или треугольника), построенного на векторах
, а также для вычисления площади параллелограмма (или треугольника), построенного на векторах  и
и  (рис. 11):
(рис. 11):

 (42)
(42)
Смешанным произведением трех векторов , и называется число, равное скалярному произведению векторов  и .
и .
Обозначения смешанного произведения:  или
или  .
.
Если = { ax; ay; az }, = { bx; by; bz } и = { сx; сy; сz }, то смешанное произведение можно вычислить при помощи определителя:
 =
=  . (43)
. (43)
Если три ненулевых вектора  , и
, и  параллельны одной и той же плоскости (компланарны), то их смешанное произведение равно нулю:
параллельны одной и той же плоскости (компланарны), то их смешанное произведение равно нулю:
= 0. (44)
Объем V параллелепипеда, построенного на векторах , и  можно вычислить по формуле:
можно вычислить по формуле:
 . (45)
. (45)
7. Уравнение плоскости в пространстве
Общее уравнение плоскости:  ,
,
где A, B, C – координаты вектора нормали вектора  (любого вектора, перпендикулярного данной плоскости), D – свободный член уравнения.
(любого вектора, перпендикулярного данной плоскости), D – свободный член уравнения.
Уравнение плоскости, проходящей через точку  перпендикулярно вектору
перпендикулярно вектору  :
:
 . (46)
. (46)
Уравнение плоскости, проходящей через три заданные точки 
 :
:
 . (47)
. (47)
Угол  между двумя плоскостями, заданными уравнениями
между двумя плоскостями, заданными уравнениями  и
и  определяется как угол между векторами их нормалей
определяется как угол между векторами их нормалей  и
и  или дополнительный к нему (обычно берется острый угол), то есть
или дополнительный к нему (обычно берется острый угол), то есть
 . (48)
. (48)
8. Уравнения прямой в пространстве
Параметрические уравнения прямой l в пространстве:
 (49)
(49)
где  – фиксированная точка прямой;
– фиксированная точка прямой;
 – направляющий вектор прямой l, т.е. любой вектор, параллельный l;
– направляющий вектор прямой l, т.е. любой вектор, параллельный l;
t – числовой параметр.
Каждому значению параметра  соответствует единственная точка прямой l.
соответствует единственная точка прямой l.
Канонические уравнения прямой:
 . (50)
. (50)
Уравнения прямой, проходящей через две данные точки  и
и  :
:
 . (51)
. (51)
Углом  между прямыми называют угол между их направляющими векторами
между прямыми называют угол между их направляющими векторами  ={ m 1; n 1; p 1} и
={ m 1; n 1; p 1} и  ={ m 2; n 2; p 2}, или дополнительный к нему (обычно берется острый угол), то есть
={ m 2; n 2; p 2}, или дополнительный к нему (обычно берется острый угол), то есть
 . (52)
. (52)
Углом между плоскостью и прямой l (в случае их пересечения) называется угол между прямой и её проекцией на плоскость. Синус угла  между плоскостью
между плоскостью  и прямой
и прямой  определяется по формуле:
определяется по формуле:
 . (53)
. (53)








