 2020-07-01
2020-07-01 330
330
Объяснённой дисперсией называют процент общей дисперсии, который покрывается найденными главными компонентами, называют TRV. Необъяснённая - дисперсия остатков, называют ERV. Исходная матрица данных является 100% необъяснённой.
Один из вариантов вычисления дисперсий - по матрице остатков E. Матрица остатков - это исходная матрица Х за вычетом данных, объясняемых найденными на этом этапе главных компонент (шаг 8).
При нахождении объяснённой дисперсии сначала вычисляют дисперсию каждого примера:
 , где j - число признаков. Здесь дисперсия имеет более короткий вид потому что данные центрированы и среднее равно нулю.
, где j - число признаков. Здесь дисперсия имеет более короткий вид потому что данные центрированы и среднее равно нулю.
Вычисляют коэффициент v0, общий для всех признаков:

Объ.дисперсия k-той главной компоненты равна:

Необъяснённая дисперсия равна:
где TRV(0) - численное значение объяснённой дисперсии исходных данных, принимаемое за условные 100%.
Вычисление vi:
[r c] = size(X);
v = zeros(r,1);
for i = 1: r
for j = 1: c
v(i) = v(i) + X(i,j)^2;
end
end
Вычисление v0:
v0 = sum(v)./r;
Вычисление объяснённой дисперсии
TRV(k) = v0/c;
Необъяснённая дисперсия
ERV(k) = 1 - TRV(k)/TRV0
Здесь TRV0 вычислена таким же образом, для исходных данных.
ЛДА
Описание
Суть метода в нахождении дискримнантных функций (ДФ) вида:

Затем анализируемые данные подставляют в ДФ и получают результат  , называемый проекцией точки на ДФ, при этом классы в новом k-мерном пространстве имеют максимально возможное разделение. Размерность k равна числу ДФ и в общем случае равна числу классов минус один (G-1).
, называемый проекцией точки на ДФ, при этом классы в новом k-мерном пространстве имеют максимально возможное разделение. Размерность k равна числу ДФ и в общем случае равна числу классов минус один (G-1).
Данный метод является методом с учителем, что означает необходимость заранее предоставить репрезентативную выборку для всех анализируемых классов. В данном случае программа составляется для случая, когда в каждом классе одинаковое число точек. В противном случае необходима корректировка расчёта средних значений.
Алгоритм
В программе будут использоваться следующие переменные, которые, например, могут иметь следующие значения:
G = 2; % число классов
P = 38; % число признаков (сенсоров)
N = 50; % число примеров классе, для упрощения одинаково для всех классов
% Xj - массив размером N на P с точками j-го класса, j=1:5
1. Исходные данные необходимо автошкалировать.
см. выше, уже было
2. Находятся средние значения
- внутригрупповые для каждого класса (по каждому признаку)
for i=1:P
Xsr(1,i) = mean(X1(:,i)); % среднее 1 класса
Xsr(2,i) = mean(X2(:,i)); % среднее 2 класса
end
- межгрупповое среднее (для определения первого центроида)
Xsr_mgr = mean(Xsr); % межгрупповое среднее всех классов
3. Находятся матрицы отклонений
- межгруппового отклонения, матрица H
H = zeros(P); % объявление заранее, здесь нужно
for j = 1: 1
H = H(:,:) + (Xsr(j,:) - Xsr_mgr(1,:))'*(Xsr(j,:) - Xsr_mgr(1,:));
end
- внутригрупповых отклонений - ковариации между всеми признаками по каждому классу
C1 = zeros(P); % объявление заранее
for i=1:P % первый цикл по числу признаков
for j=1:P % второй цикл по числу признаков
for k=1:N % цикл по числу примеров в классе
sum_bufer = (X1(k,i)-Xsr(1,i))*(X1(k,j)-Xsr(1,j));
C1(i,j) = C1(i,j) + sum_bufer;
end
end
end
C1 = С1 / N;
Такие же вычисления проделать для всех классов.
4. Находится матрица M из матриц ковариаций, по формуле:

M = zeros(G); % Объявление заранее
M = M + N*C1;
M = M + N*C2;
M = M + N*C3;
5. Находятся собственные вектора исходя из формулы:

где M - вышеприведённая какая-то матрица, H - межгрупповое отклонение,  - собственное значения, w - собственный вектор.
- собственное значения, w - собственный вектор.
M1 = M\H;
% \ - деление матрицы справа налево; почему-то
% по-другому не поделилось
[w lambda] = eigs(M1); % вычисление главных значений
Здесь применена стандартная функция eigs(), которая возвращает матрицу собств. векторов (w) и диагональную матрицу собств. значений (lambda). Каюсь, ручное вычисление собственных векторов я ниасилил =(
Собств. вектора w, соответствующие собств. значениям  , и порождают дискриминантные функции. Но перед использованием коэффициенты векторов нужно стандартизировать (в некоторых книгах не стандартизируют, но тогда эти результаты не будут сходиться с результатами других программ)
, и порождают дискриминантные функции. Но перед использованием коэффициенты векторов нужно стандартизировать (в некоторых книгах не стандартизируют, но тогда эти результаты не будут сходиться с результатами других программ)
6. Стандартизация дискриминантных коэффициентов:
где n - общее число примеров по всем классам, g - число классов;

b0 = zeros(P,1);
for i=1:K % Перебор по числу ДФ
for j=1:P % Перебор по числу классов
b(i,j) = w(i,j)*(K^0.5);
b0(i) = b0(i) + b(i,j)*Xsr_mgr(j);
end
end
В итоге получится матрица b, и b0, где каждая строка - коэффициенты соответствующей ДФ.
Тогда, например, для j -го примера класса k размерностью в p признаков результат первой ДФ будет равен:

Применение
Пусть имеется 3 класса по 3 признака, и по 2 примера в каждом классе. График по первым двум признакам:
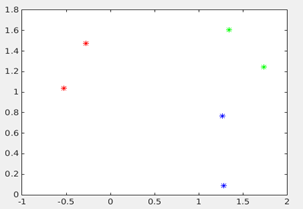
Здесь видно, что класс 1 (красный) пересекается с классом 2 (синий) по оси Y, и класс 2 пересекается с классом 3 по оси Х.
После вычисления ДФ имеет матрицу b0 2x1 и b размерностью 2х3. Здесь первая строка обоих матриц - одна ДФ, 1 столбец матрицы b -  , второй -
, второй -  и т.д.
и т.д.
Для получения данных в новом пространстве ДФ необходимо умножить исходные матрицы таким образом, чтобы в каждом примере значение данных каждого признака было умножено на соответствующий признаку коэффициент ДФ; производится суммирование всех произведений для каждого примера, затем суммируется с соответствующим ДФ коэффициентом  .
.
Например, пусть df1 - результирующая матрица для первого класса, где первый столбец соответствует первой ДФ, второй столбец - второй ДФ, а каждая строка - примеры данных. Тогда вычисление результирующих матриц для каждого класса будет иметь вид:
df1(:,1) = b0(1) + X1s(:,1).*b(1,1) + X1s(:,2).*b(1,2) + X1s(:,3).*b(1,3);
df2(:,1) = b0(1) + X2s(:,1).*b(1,1) + X2s(:,2).*b(1,2) + X2s(:,3).*b(1,3);
df3(:,1) = b0(1) + X3s(:,1).*b(1,1) + X3s(:,2).*b(1,2) + X3s(:,3).*b(1,3);
df1(:,2) = b0(2) + X1s(:,1).*b(2,1) + X1s(:,2).*b(2,2) + X1s(:,3).*b(2,3);
df2(:,2) = b0(2) + X2s(:,1).*b(2,1) + X2s(:,2).*b(2,2) + X2s(:,3).*b(2,3);
df3(:,2) = b0(2) + X3s(:,1).*b(2,1) + X3s(:,2).*b(2,2) + X3s(:,3).*b(2,3);
График имеет следующий вид (здесь df1 - красным, df2 - зелёным, df3 - синим)
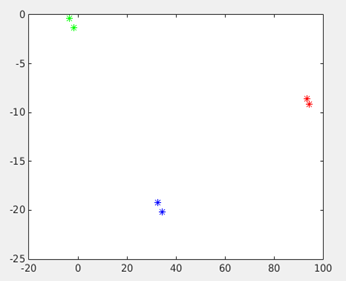
Таким образом, видим более отчётливое разделение на классы. Помимо этого сокращается размерность (в этом случае с трёх до двух).








