 2020-07-01
2020-07-01 108
108
По способу установки датчиков:
– врезные;
– накладные.
По способу установки камер:
– наружние;
– внутренние (за лобовым стеклом).
По количеству датчиков:
– 2х-датчиковые системы (два - назад);
– 3х-датчиковые системы (три - назад);
– 4х-датчиковые системы (четыре - назад);
– 6ти-датчиковые (два – вперед, четыре назад);
– 8ми-датчиковые (четыре - вперед, четыре назад).
– 12ти-датчиковые (четыре - вперед, четыре назад, 2-слева, 2-справа).
По количеству камер:
– 1 камера (сзади);
– 2 камеры (одна - вперед, вторая – назад);
– 4 камеры (одна - вперед, вторая – назад, две по бокам автомобиля).
Врезные ультразвуковые датчики (УЗ-датчики) устанавливаются в бампер автомобиля, они гораздо удобнее в пользовании и при окраске в цвет автомобиля выглядят как штатное оборудование и не портят дизайн. Накладные устанавливаются поверх бампера.
Чем больше датчиков установлено на автомобиле, тем меньше "мертвых зон" при движении. Самый простой вариант комплектации - два датчика, которые устанавливаются по углам заднего бампера. Но этот вариант гарантирует безопасность только частично - какой-нибудь торчащий из земли столбик, приходящийся по центру машины, прибор может не заметить. Система с тремя датчиками - два по углам бампера и один посередине - работает более точно, но тонкие или низкие препятствия вроде куска проволоки или угла высокого бордюра также могут быть не обнаружены. Гарантировать полную безопасность автомобилю способен только парктроник с четырьмя и более датчиками, диапазон сенсорного охвата которого оптимально широк.

Рисунок 1 – Система с двенадцати датчиками.
Измерение расстояния до объекта посредством ультразвуковых датчиков основано на принципе измерения времени прохождения сигнала. При этом обработка отражённого от объекта сигнала производится в той же точке, что и излучение, т.е. используется метод непосредственного обнаружения. В момент времени Т0 (Рис.2) ультразвуковой передатчик излучает сигнал - пачку импульсов Δt, которая распространяется в окружающей среде со скоростью звука. Когда сигнал достигает объекта, часть сигнала отражается и приходит в приёмник в момент времени Т1. Электронная схема устройства обработки сигнала определяет расстояние до объекта, измеряя время Т1–Т0.
Система, в которой УЗ-датчик является и приемником и излучателем сигнала, имеет существенный недостаток, который состоит в том, что после излучения пачки импульсов должно пройти некоторое время, прежде чем мембрана излучателя успокоится и сможет работать на приём. Этот интервал называется «мёртвым» временем датчика (Рис. 2). Наличие «мёртвого» времени приводит к тому, что ультразвуковые измерители расстояния с одной головкой имеют так называемую «слепую» зону, то есть, когда объект находится слишком близко, отражённая пачка приходит в измеритель так скоро, что он не успевает перестроиться с передачи на приём и объект не может быть обнаружен. Длительность переходных процессов излучателя-приёмника зависит от многих факторов, таких как суммарная колеблющаяся масса, внутреннее затухание сигнала, развязывающий материал и особенности механической конструкции датчика. Так, например, граница «слепой» зоны для ультразвуковых датчиков фирмы Pepperl+Fuchs традиционных конструкций с зонами реагирования 1 м и 6 м равняется 0,2 м и 0,8 м. Это соответствует «мёртвому» времени 1 мс и 5 мс.
Пусковым импульсом активизируется схема возбуждения излучателя, которая вырабатывает серию импульсов с амплитудой 250 В. Тем же пусковым импульсом блокируется вход усилителя приёмника. После выключения излучателя приёмник разблокируется. Восстановление приёмника занимает 300 мкс, то есть намного меньше, чем успокоение излучателя, поэтому параметры приёмника никак не влияют на величину «слепой» зоны.
Когда объект с достаточной отражательной способностью находится в зоне контроля, отраженный акустический сигнал возбуждает на мембране высокочастотное переменное напряжение. Это напряжение обрабатывается методами обнаружения аналоговых сигналов — ограничивается, усиливается, детектируется и поступает на компаратор. Превышение этим напряжением заданного значения порога обнаружения служит сигналом о наличии объекта в зоне контроля. Электронная схема фиксирует временной интервал, прошедший с момента активизации излучателя и формирует выходной электрический сигнал, пропорциональный этому временному интервалу. Зарегистрировав поступление первого отражённого сигнала, схема управления задерживает формирование очередного пускового импульса, ожидая возможного прихода отражённых сигналов от более удалённых объектов в зоне контроля[19]. Функциональная схема датчика непосредственного обнаружения приведена на рисунке 3.

Рисунок 3 – Блок-схема УЗ-датчика с совмещенным излучателем и приемником
Камеры устанавливаются сверхширокоугольные, всего четыре: заднего вида, переднего вида, а также две камеры бокового вида (в зеркала). Благодаря этому получаем сформированное общее изображение (т. е. вид сверху) на рисунке 4 и полный контроль за ситуацией по всему периметру автомобиля. Камеры кругового обзора позволяют просматривать всё пространство вокруг автомобиля или отображать информацию с каждой камеры отдельно, на одном экране, в двух ракурсах, что позволяет парковаться впритык и повысить безопасность любого маневра.
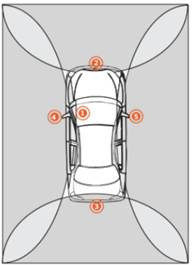
Рисунок 4– Общее изображение, вид сверху.
Экран системы делится на 2 части: 1/3 часть изображения занимает панорамная картинка «вид сверху», 2/3 части изображения занимает картинка с одной из четырех камер, в зависимости от направления движения автомобиля. Таким образом, при различных маневрах – будь то парковка, движение в ограниченном пространстве или выезд задним ходом, вы всегда сможете оценить обстановку, как вокруг автомобиля, так и отдельно с каждой камеры в приоритетной зоне.
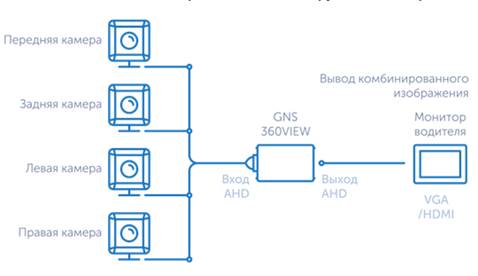
Рисунок 5–Схема работы системы кругового обзора.








