 2020-07-12
2020-07-12 267
267
Промышленные роботы весьма разнообразны и могут включать в себя элементы более чем одного типа. Так, например, робот с шарнирными сочленениями, или, как его еще называют, шарнирный робот, может быть интегрирован в портальный (козловой) робот (он устанавливается на массивное жесткое основание, а его направляющие закреплены на фундаменте практически неподвижно) или в мобильного робота. Рассмотрим основные типы промышленных роботов и их функции. [5]
Сферический робот, с полярной системой координат (POLAR COORDINATE ROBOT).
Такой робот имеет центральный поворотный вал как у башни танка и удлиняющуюся руку с вращающимся запястьем. Рука, способная удлиняться предназначена для достижения большого радиуса действия. Такой тип роботов широко использовался на заре промышленной робототехники. Примером такого робота является робот Kawasaki-Unimate 2000. [6]
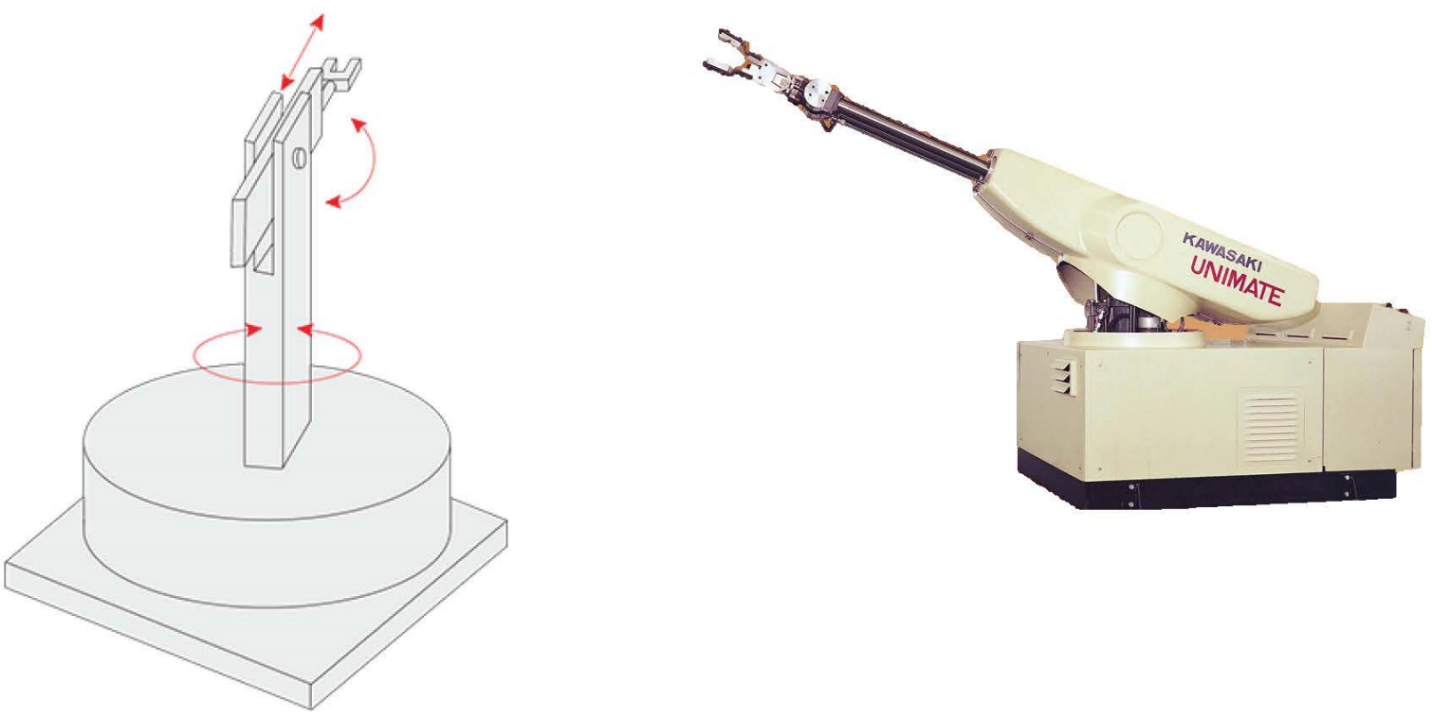
Рисунок 2. Схема сферического робота, с полярной системой координат. Робот Kawasaki-Unimate 2000, выпущенный в 1969 г.
Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT).
Такой робот похож на робота с полярной системой координат – у него также есть выдвигающаяся рука и поворотный вал. Но разница заключается в движении руки робота, которая может двигаться по вертикали, скользящим линейным, а не вращающимся движением. Сегодня роботы этого типа по-прежнему используются, например, для переноса LCD панелей для мониторов. [6]
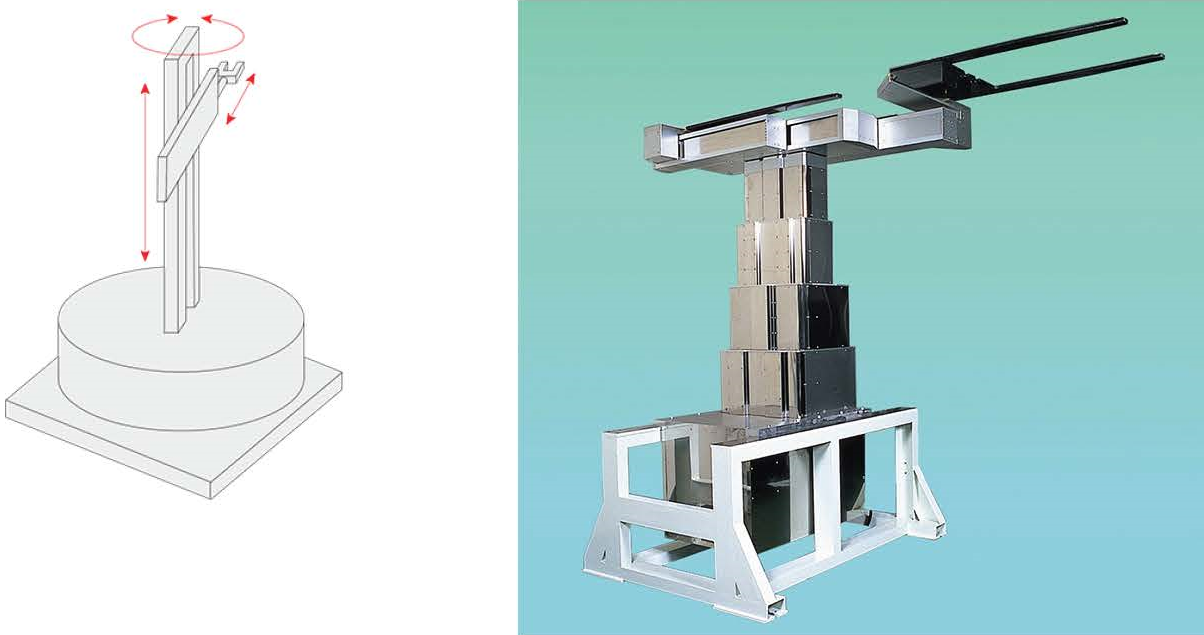
Рисунок 3. Схема цилиндрического робота. Робот Kawasaki TL420 для работы с жидкокристаллической стеклянной подложкой








